在電腦上,我們最常用的接口之一,應該就是USB了,相比之前講到的外設通信方法,USB更加復雜,速度也....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-24 15:38
?1538次閱讀

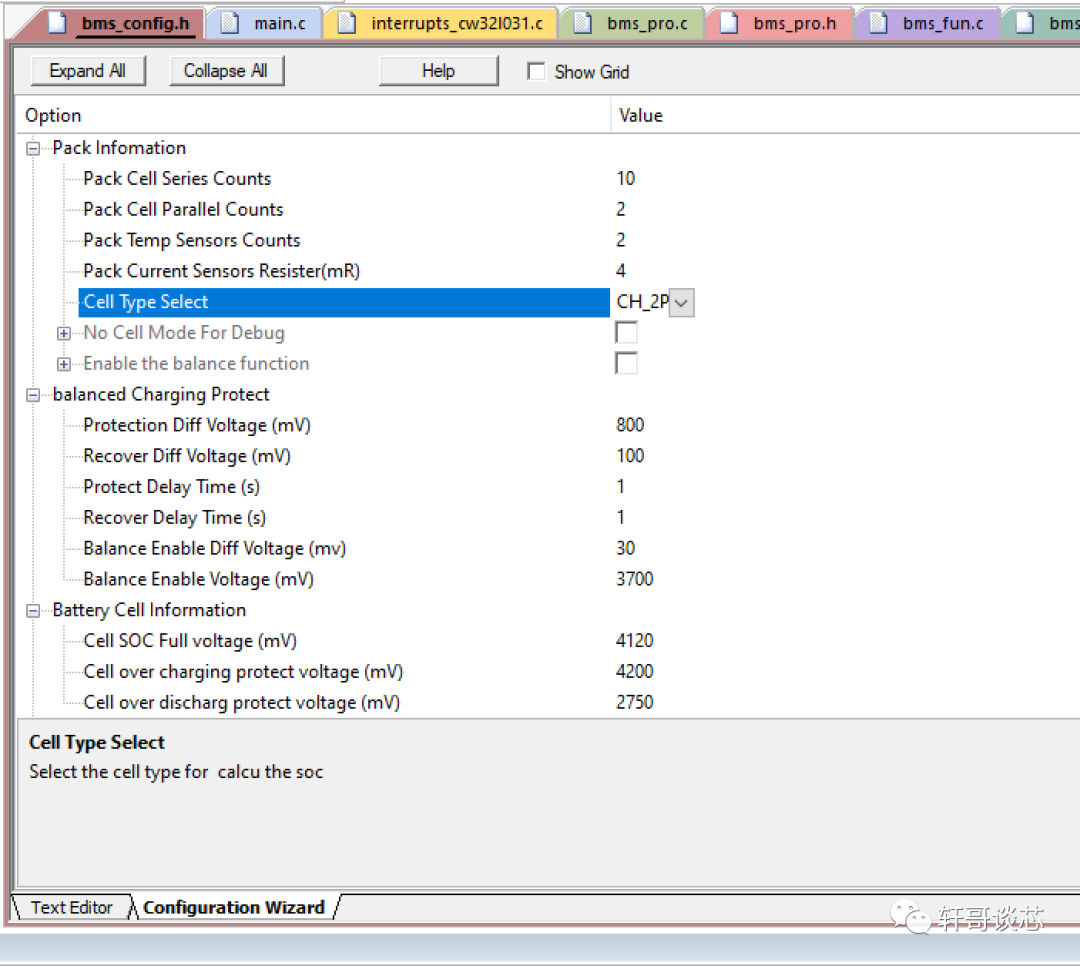
Configuration Wizard的語法規則 大家如果有使用過HTML語法,這里就非常容易理解....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-23 18:09
?1599次閱讀
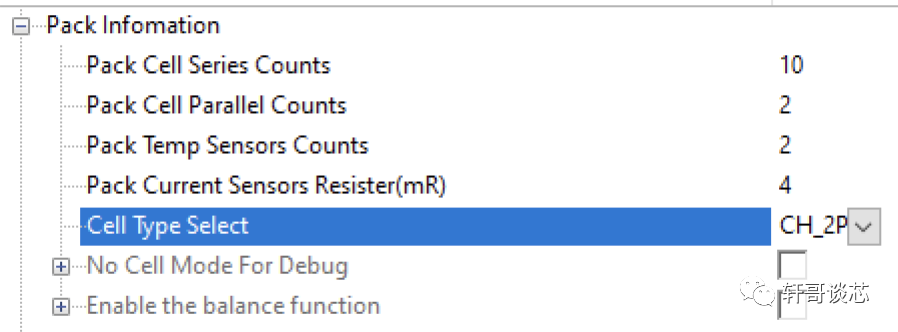
MDK 的Configuration Wizard Configuration Wizard翻譯成中....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-23 17:50
?1268次閱讀
下面針對一些典型場景缺通用日志(android/kernel)的問題,一一列舉如下,希望可以讓大家關....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-23 17:39
?1327次閱讀

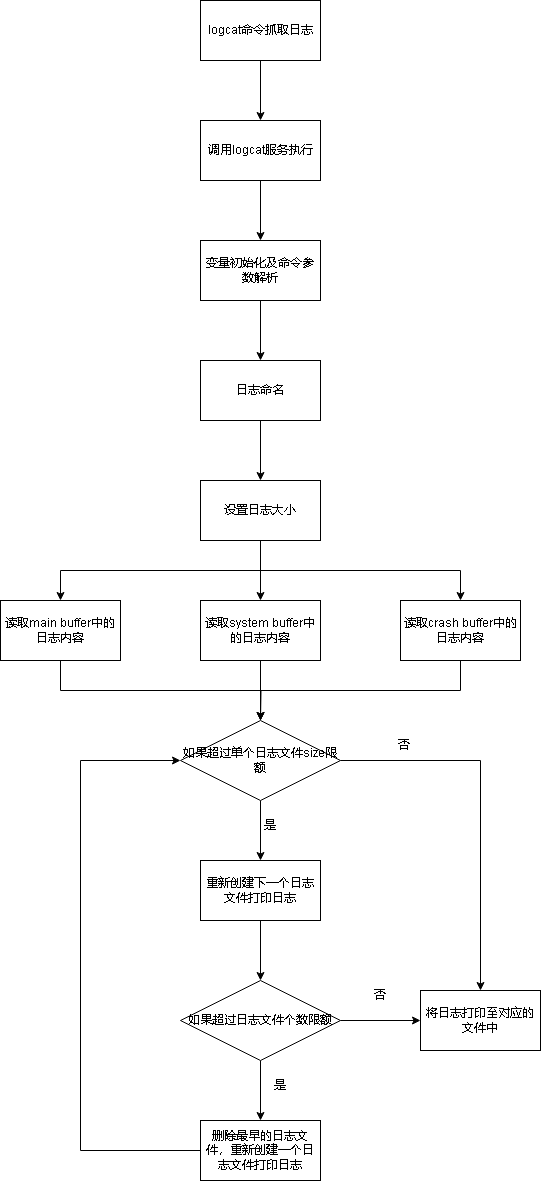
命令抓取日志 logcat -b main -b system -b crash -r 1024 -....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-23 17:31
?2016次閱讀
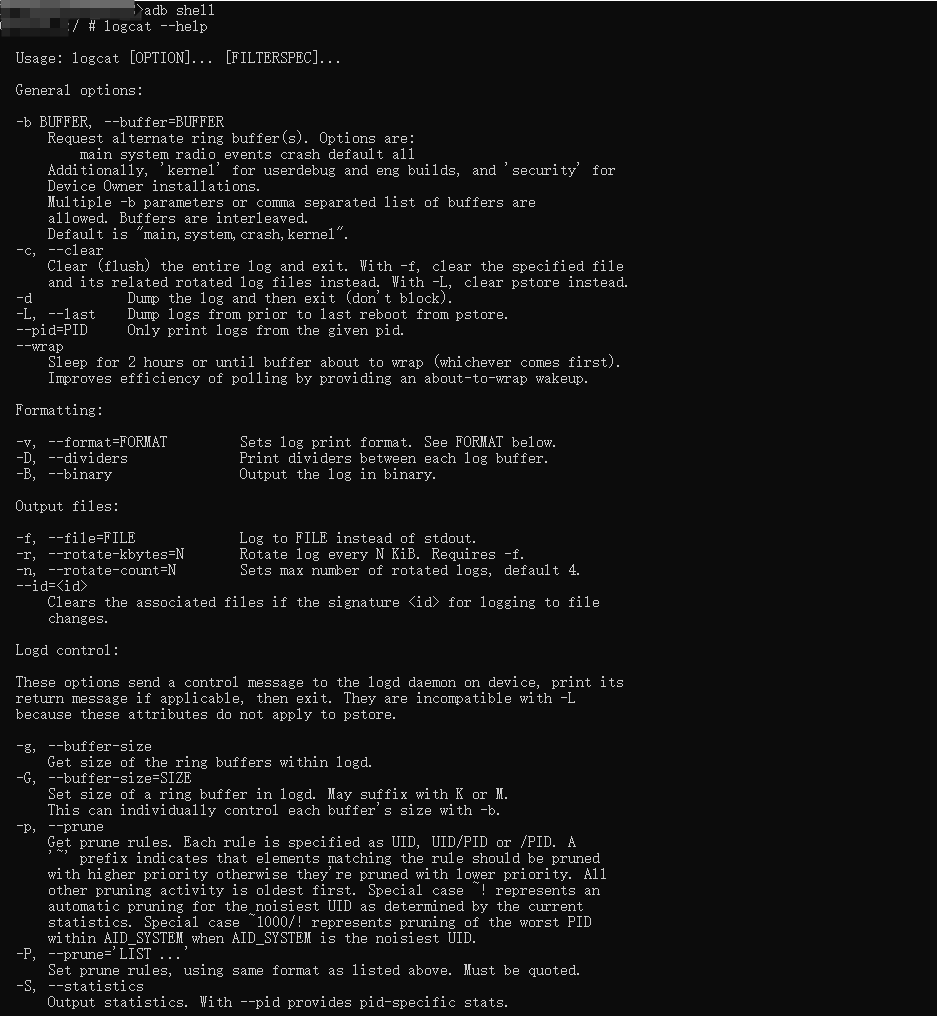
logcat命令介紹 具體的參數使用可以通過命令查看,或者查看具體的源碼,當然直接查看命令較為方便。....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-23 17:18
?566次閱讀
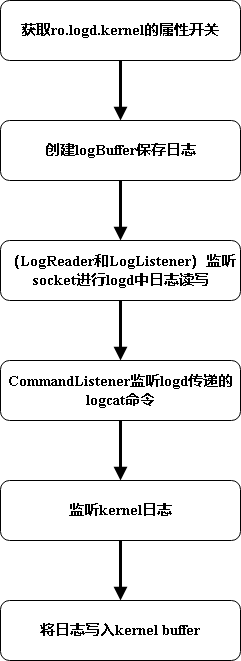
kernel日志寫入logd介紹 通過logcat命令獲取kernel日志比較特殊,故作為一個例子進....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-23 17:11
?1035次閱讀
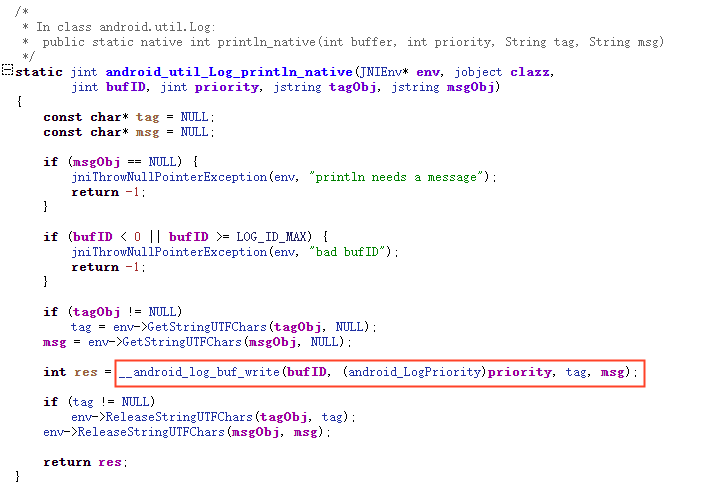
2.2.3 Android日志與logd交互過程 2.2.3.1 Android日志傳遞給logd ....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-23 17:06
?1284次閱讀
logd作為native service,系統啟動過程通過讀取rc文件來啟動,相關的屬性定義在如下l....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-23 16:54
?1250次閱讀
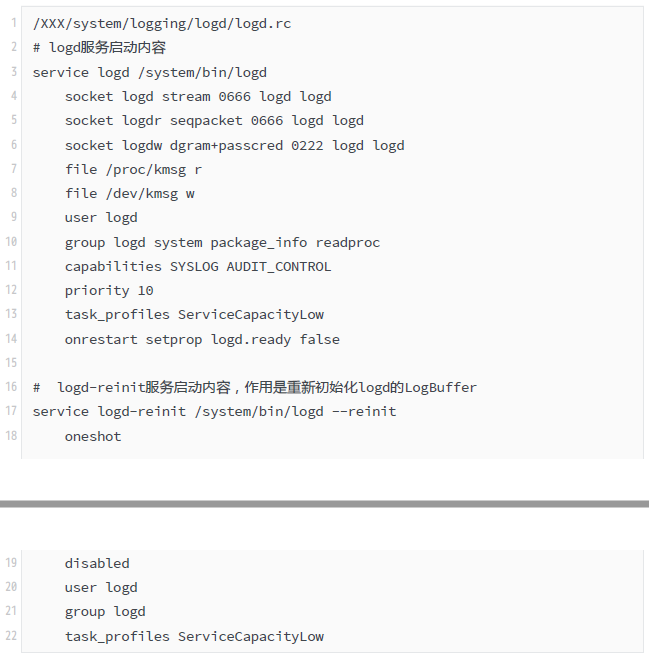
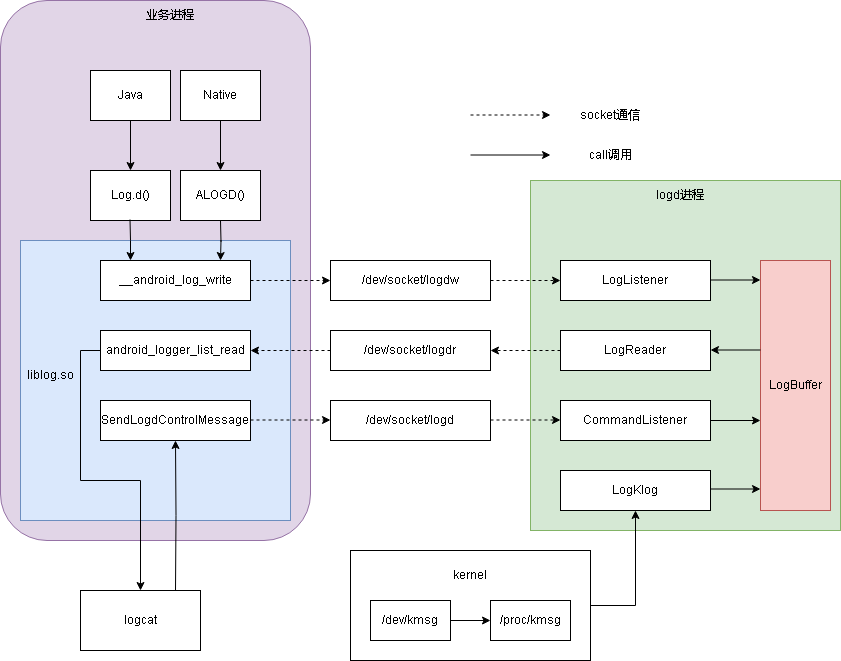
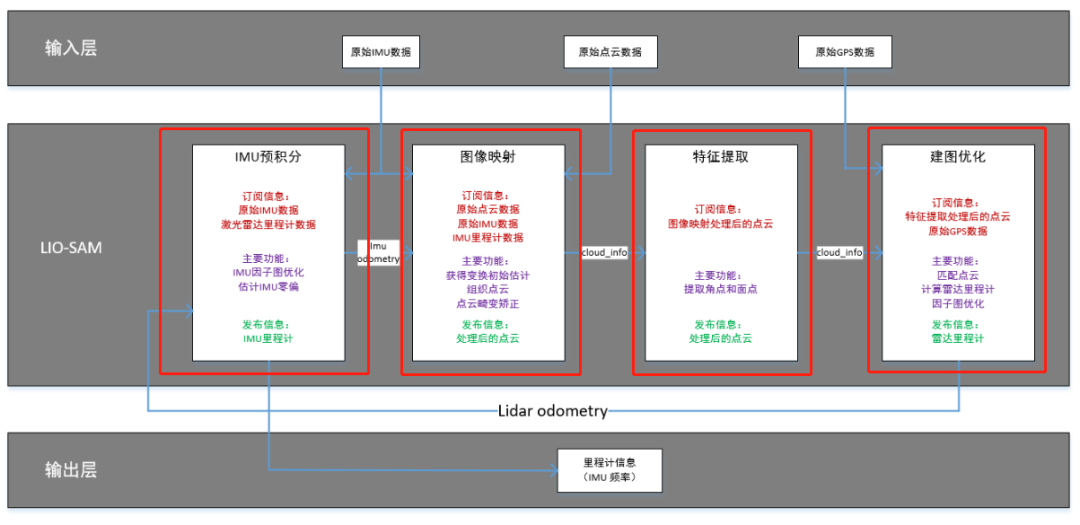
2.1 整體設計架構 2.1.1 logd架構設計圖 架構設計圖內容簡介如下: logd啟動過程還存....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-23 16:31
?906次閱讀
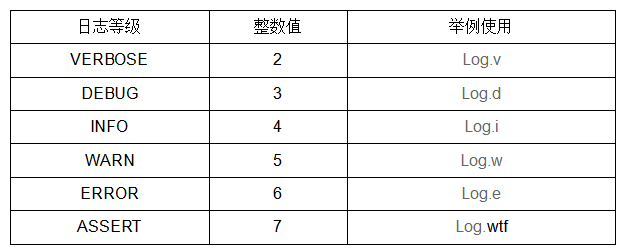
1、日志接口 日志接口內容,共分為java層、native層、kernel層等。下面就對每個層級的內....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-23 16:27
?1502次閱讀
配置ROS驅動功能包 將WHEELTEC 100N的 ROS_SDK 保存在工作空間的src文件夾下....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-22 18:13
?1887次閱讀

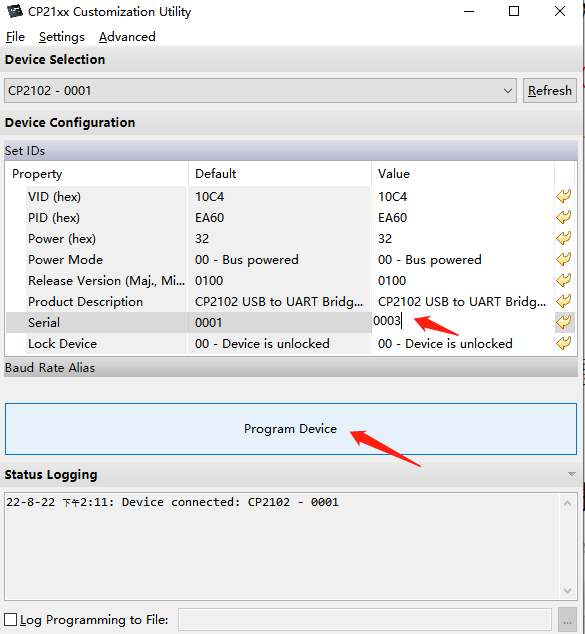
配置固定串口設備 在linux中設備接到哪個串口號上是隨機的,為解決這個問題,可以先將N100 設備....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-22 17:58
?1372次閱讀
車聯網、自動駕駛、無人駕駛、汽車智能化、網聯化等成為了汽車行業的熱點話題,未來汽車一定是朝著安全、可....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-22 17:52
?4051次閱讀
Launch文件解析 先來看下剛才運行的launch文件,里邊啟動了四個節點,分別是: 小海龜仿真器....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-22 17:44
?857次閱讀
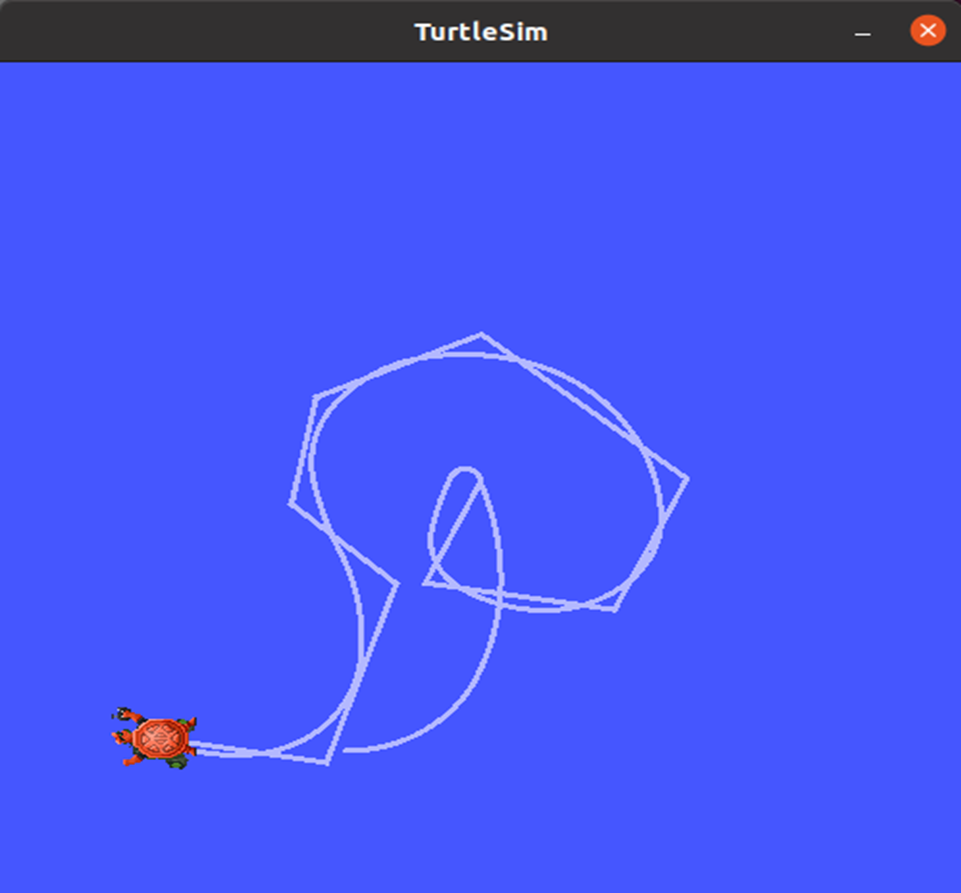
海龜跟隨功能解析 運行效果 先看下實現的效果,啟動終端后,通過如下命令啟動例程: ** ros2 l....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-22 17:35
?990次閱讀
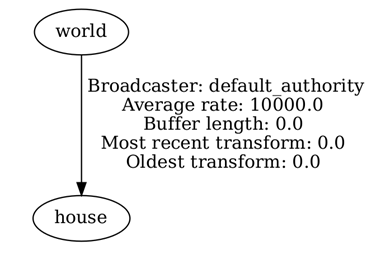
靜態TF廣播 我們說TF的主要作用是對坐標系進行管理,那就管理一個試試唄? 坐標變換中最為簡單的應該....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-22 17:31
?809次閱讀
TF命令行操作 ROS中的TF該如何使用呢?我們先通過兩只小海龜的示例,了解下基于坐標系的一種機器人....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-22 17:24
?1685次閱讀
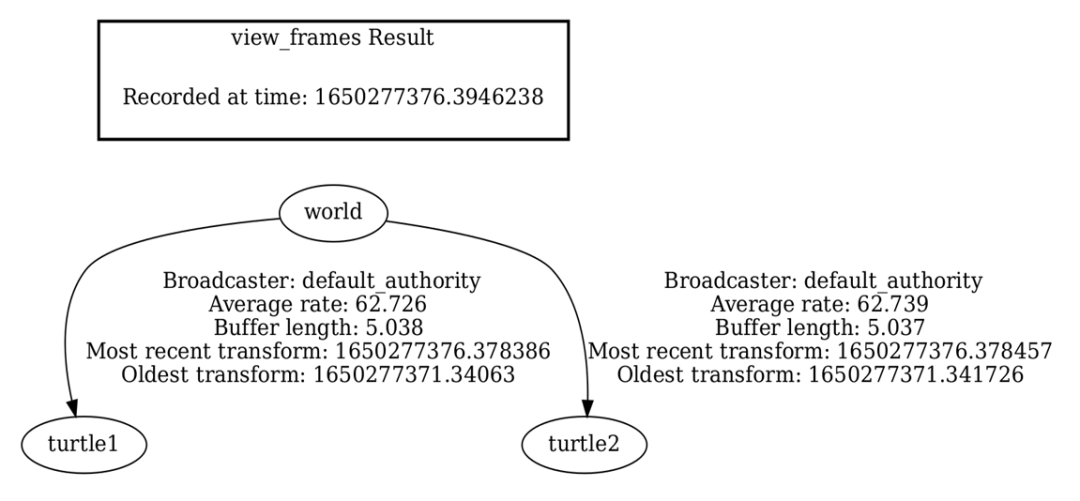
坐標系是我們非常熟悉的一個概念,也是機器人學中的重要基礎,在一個完整的機器人系統中,會存在很多坐標系....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-22 17:20
?2051次閱讀

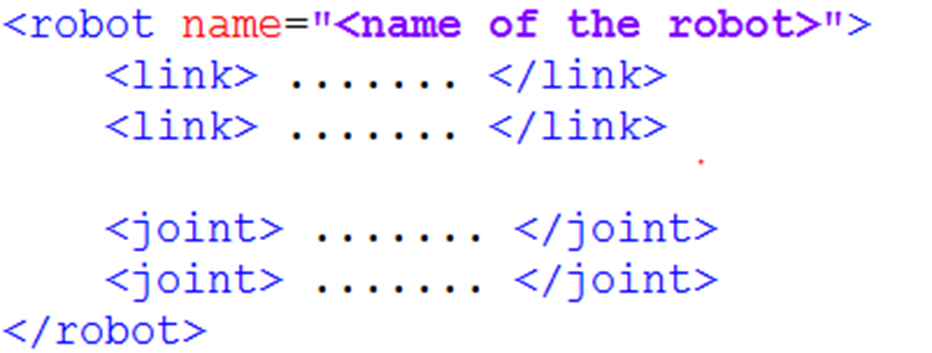
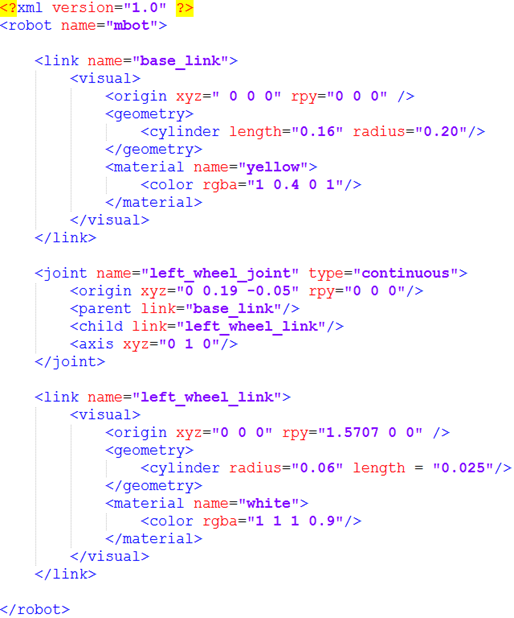
完整機器人模型 所有的link和joint標簽完成了對機器人每個部分的描述和組合,全都放在一個rob....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-22 17:09
?1328次閱讀
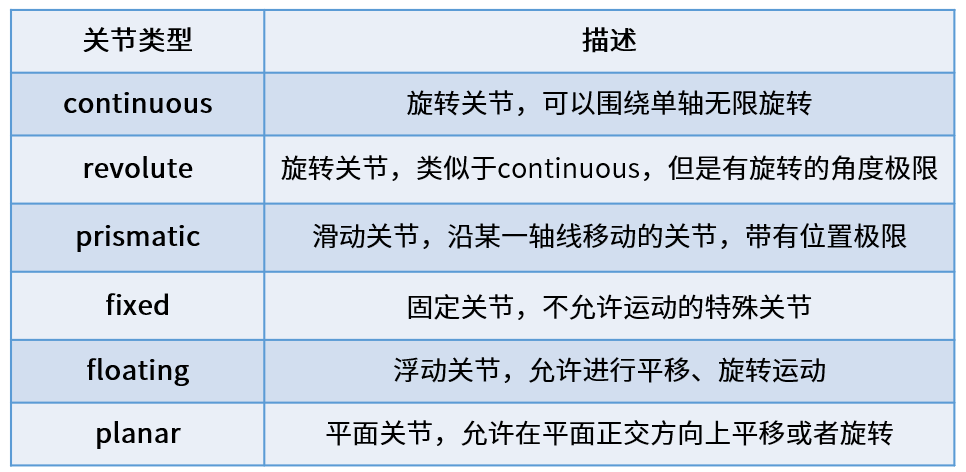
機器人模型中的剛體最終要通過關節joint連接之后,才能產生相對運動。 URDF中的關節有六種運動類....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-22 16:51
?2410次閱讀
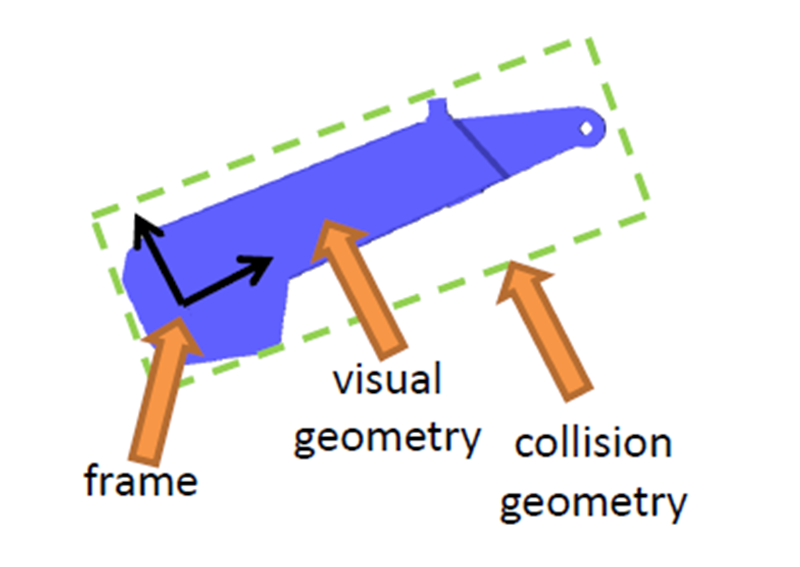
標簽用來描述機器人某個剛體部分的外觀和物理屬性,外觀包括尺寸、顏色、形狀,物理屬性包括質量、慣性矩陣....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-22 16:39
?1122次閱讀
URDF:機器人建模方法 ROS是機器人操作系統,當然要給機器人使用啦,不過在使用之前,還得讓ROS....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-22 16:30
?1323次閱讀
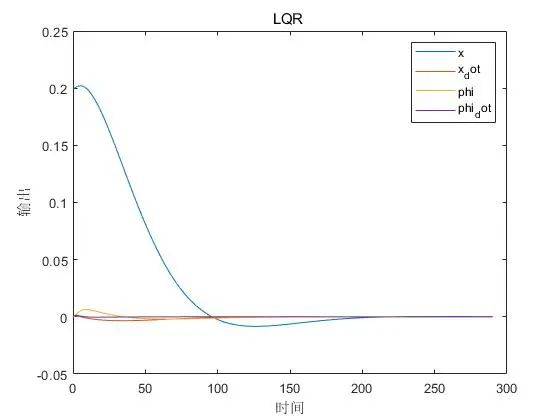
程序實現: 在MATLAB中可采用的語法為: [K,S,P] = l qr(sys,Q,R,N) [....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-22 16:20
?660次閱讀
為實現與環境的安全、柔順交互,需要將機器人期望動力學行為與接觸環境所表現出來的特征進行匹配。定性地分....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-22 15:59
?813次閱讀
隨著自動化技術的不斷進步,機器臂(Robotic Manipulator)在噴涂、上下料、分揀、碼垛....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-22 15:57
?1394次閱讀
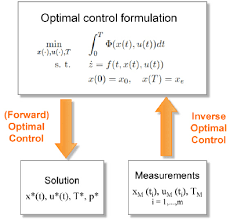
機器人在執行期望目標任務時,我們希望機器人能精確地達到人類所預設的目標,那么我們就來理解下什么是最優....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-22 15:29
?1900次閱讀
代碼解讀 int main(int argc, char** argv){ ros::init(ar....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-22 15:18
?1315次閱讀

LIO-SAM的全稱是:Tightly-coupled Lidar Inertial Odometr....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-22 15:04
?1642次閱讀
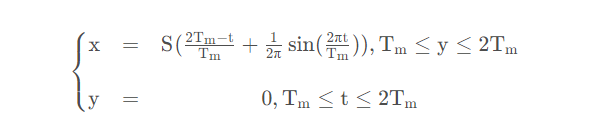
支撐相足端軌跡 相比于擺動相的足端軌跡,支撐相的設計就顯得稍微簡單。首先我們要知道兩點: 支撐相水平....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-22 11:48
?598次閱讀




 工商網監
湘ICP備2023018690號-1
工商網監
湘ICP備2023018690號-1

