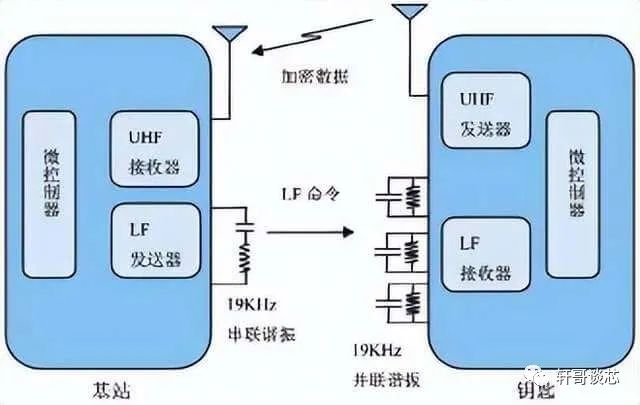
隨著汽車電子技術的不斷發(fā)展,傳統(tǒng)的無線門禁系統(tǒng)已無法滿足廣大用戶的需求。免持式被動無鑰匙門禁系統(tǒng)PK....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-20 17:50
?2047次閱讀
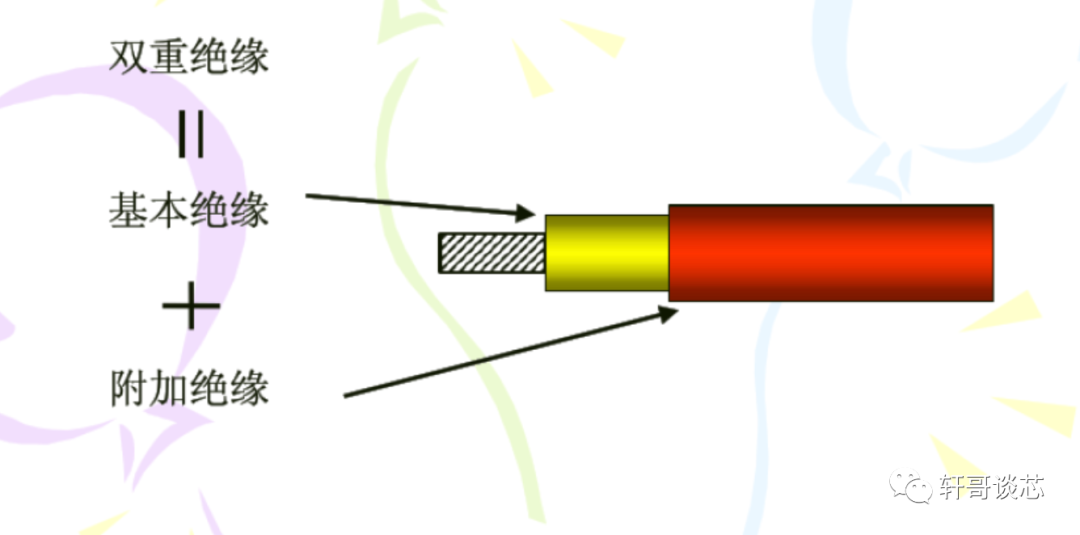
雙重絕緣 定義:由基本絕緣和輔助絕緣組成的絕緣 1、雙重絕緣是由基本絕緣和附加絕緣組成的防觸電措施;....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-20 17:40
?8162次閱讀
基本絕緣定義:用于防止觸及帶電部件的初級保護,該防護是由絕緣材料完成的。 基本絕緣的目的是為防觸電提....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-20 17:31
?3051次閱讀
相對于快恢復二極管的特點 肖特基整流管的結構原理與PN結整流管有很大的區(qū)別,通常將PN結整流管稱作結....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-20 17:25
?1500次閱讀
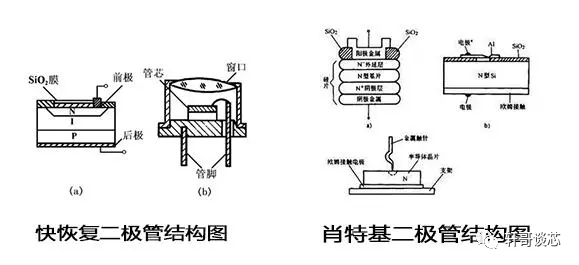
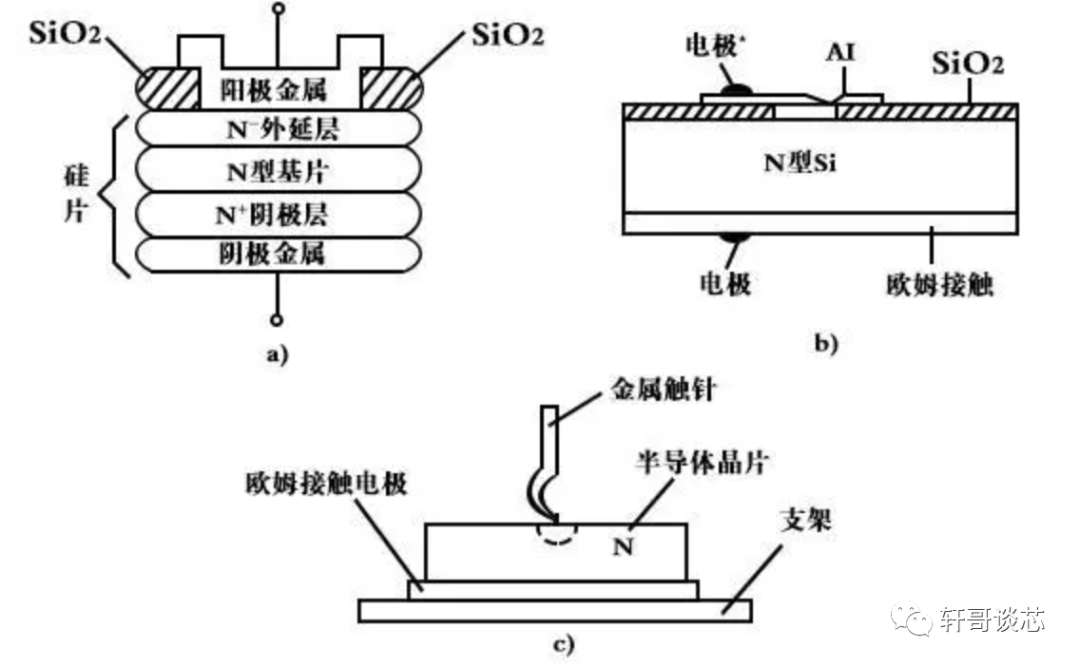
肖特基二極管 肖特基二極管(Schottky BarrierDiode SBD),也稱肖特基勢壘二極....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-20 17:20
?2917次閱讀
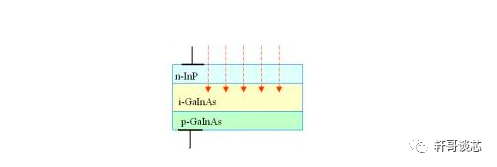
快恢復二極管 快恢復二極管(Fast Recovery Diode,F(xiàn)RD), 也稱快速恢復二極管,....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-20 16:59
?2314次閱讀
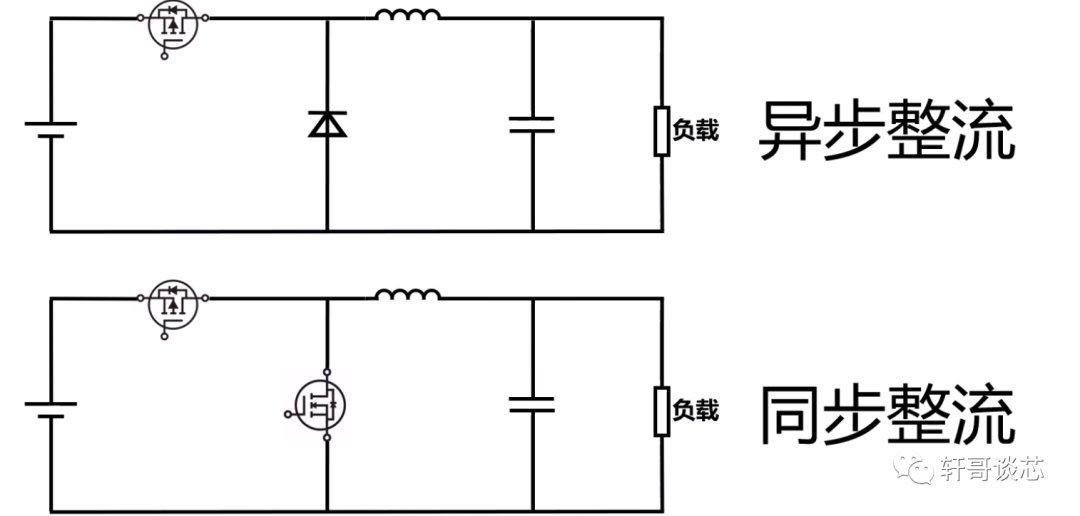
異步整流的優(yōu)缺點 異步整流在輸出電流變化的情況下,二極管的電壓降相當恒定,鍺管的壓降為0.3V,硅管....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-20 16:55
?1701次閱讀
一、同步整流 同步整流是采用Rdson較低功率MOS,取代了異步整流中續(xù)流二極管以降低續(xù)流損耗的一種....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-20 16:52
?3161次閱讀
異步 DCDC 中的自舉電容 下面,我們通過一幅圖來看一下,對于異步 DCDC 芯片,它的自舉電容的....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-20 16:43
?872次閱讀
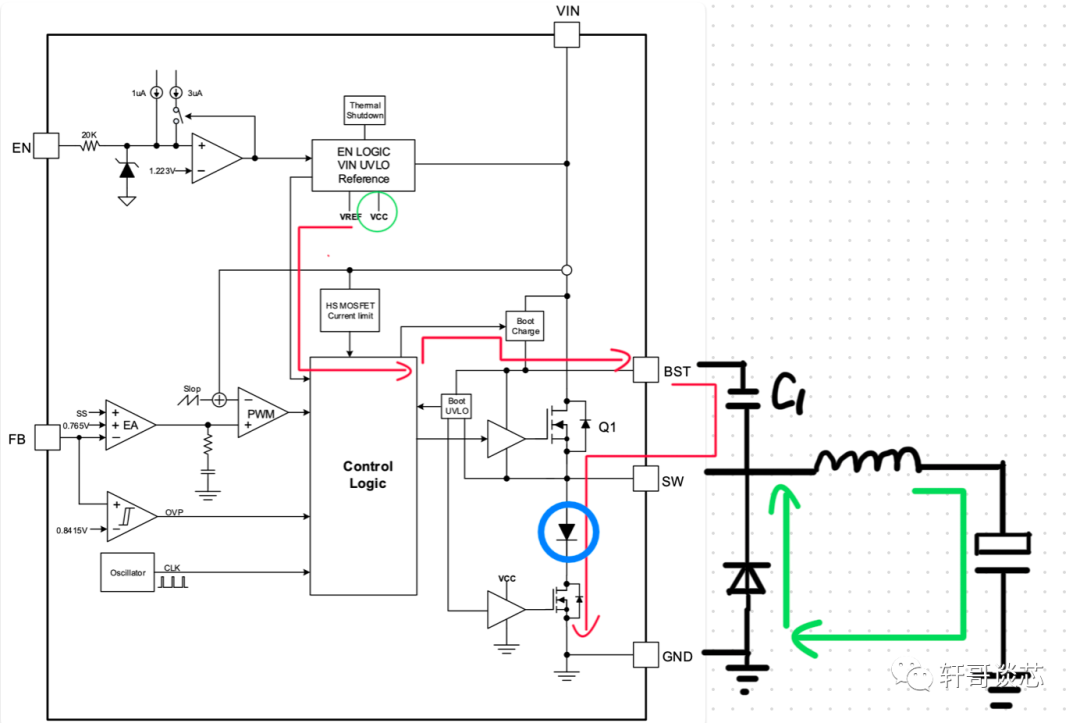
H橋驅動電路中的自舉電容分析 我想利用 H 橋驅動電路中的 MOS 和 MOSDriver 電路來分....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-20 16:38
?2435次閱讀
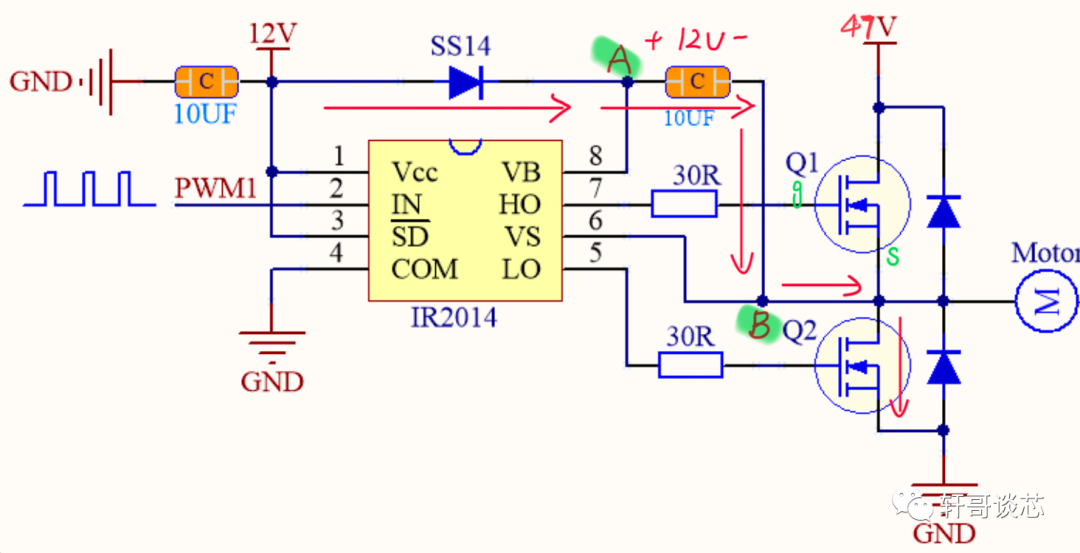
MOS 管的開啟與關閉 要研究這個自舉的由來,我們還是先看一下 MOS 的開啟與關閉。從上文得知,我....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-20 16:27
?3212次閱讀
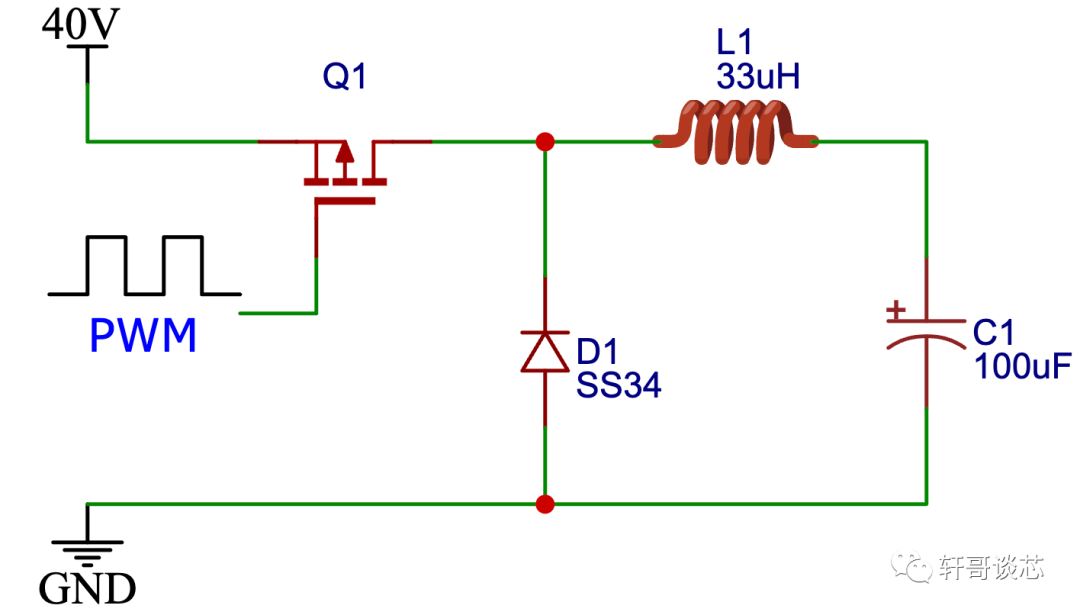
在以往的電子產(chǎn)品設計中,我經(jīng)常會選用到 DCDC 芯片,不過大部分情況下是基于 Buck拓撲的,這主....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-20 16:13
?1103次閱讀
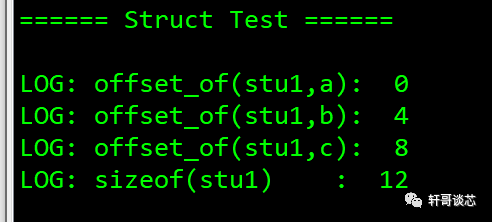
嵌套的結構體,字節(jié)又是如何對齊的呢 先來看下面的代碼 typedef struct stu1 { c....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-20 16:01
?786次閱讀
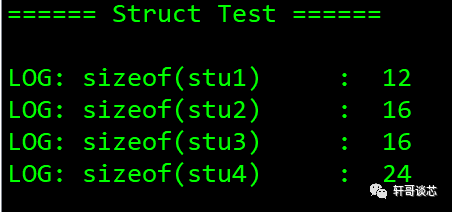
什么是結構體的字節(jié)對齊現(xiàn)象 程序員,咱都用代碼說話,先上 code: (說明:以下代碼均在 ARM ....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-20 15:55
?854次閱讀
運行 安裝上面的步驟,到這里就全部安裝好了,體驗LLM有兩種方式,一個是直接在shell窗口中以聊天....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-20 15:52
?1075次閱讀
一、安裝 1. OriginBot系統(tǒng)安裝 目前OriginBot系統(tǒng)有V1和V2兩個版本,只有V2....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-20 15:46
?650次閱讀
作為無人車以及智能機器人而言,在裝配過程中各個傳感器之間的外參標定一直是比較頭疼的問題。這里作者也系....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-20 15:34
?2454次閱讀

這里以一個智能車代碼工程為例,抽取串口通信部分代碼 在頭文件中,進行串口頭文件的包含 # inclu....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-17 18:10
?1377次閱讀
創(chuàng)建設備別名 需要創(chuàng)建設備別名原因: 在運行一個ros程序的時候需要提供一個端口名,這個端口名一般是....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-17 18:07
?1079次閱讀

硬件連接 ROS主控通過usb線連接到一個TTL電平轉換芯片,再由這個電平轉換芯片連接STM32芯片....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-17 18:00
?1272次閱讀
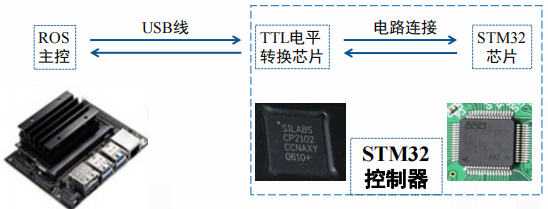
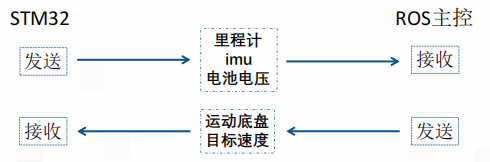
以簡單的智能車為例,一般會存在兩個控制器,一個是運行ROS的主控,另一個是運行電機控制和傳感器信息采....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-17 17:54
?1091次閱讀
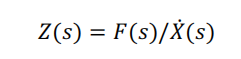
阻抗控制在頻域范圍內(nèi)的定義: 考慮到交互力與位置的關系,可以演變?yōu)槿缦履J剑?阻抗可以以期望慣量、阻....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-17 17:47
?958次閱讀
機器人具有高度非線性,強時變以及強耦合等動力學特性,為了提高機器人控制的性能,研究人員提出了基于模型....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-17 17:43
?1122次閱讀
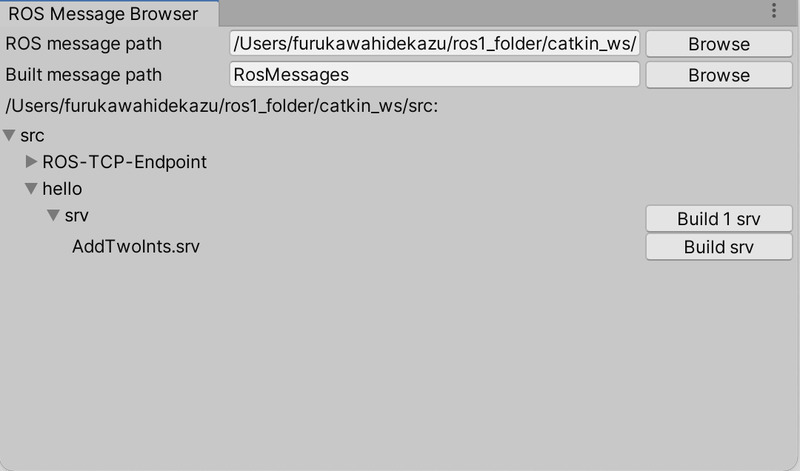
Service話題 首先使用同樣的方法可以完成srv文件的導入 服務端的實現(xiàn)。Hierarchy窗口....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-17 17:36
?853次閱讀
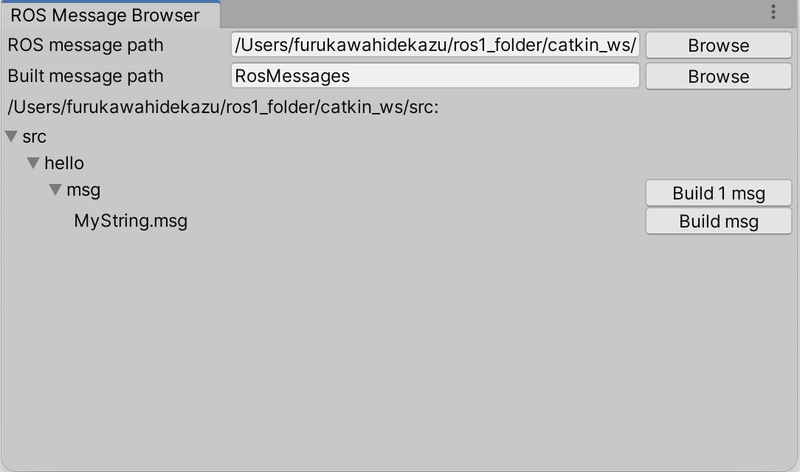
自定義msg 將消息導入Unity的步驟如下所示: 1.Unity的菜單“Robotics→Gene....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-17 17:26
?747次閱讀
對于ROS而言,其最常用的就是Topic話題以及Service兩個了。之前我們在了解Unity Ro....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-17 17:22
?1428次閱讀

柔性機械臂 剛性機械臂建模方法已經(jīng)可以有效地求解出機械臂各部分之間的耦合情況,但是對于柔性機械臂的動....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-17 17:12
?1213次閱讀
剛性機械臂 機械臂建模是機械臂控制的基礎,控制效果的好壞很大程度上決定于所建立的動力學模型的準確性。....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-17 17:03
?1196次閱讀
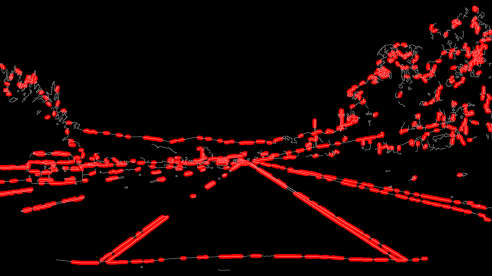
Canny邊緣檢測+霍夫變換 顏色閾值+圖像掩模的方法雖然簡單,但是只能應對一些固定顏色車道線的場景....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-17 16:55
?1488次閱讀
1.顏色閾值+ 區(qū)域掩模 我們可以僅僅通過設置一些RGB通道閾值,來提取車道線。 以下的代碼設置了R....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-17 16:49
?658次閱讀







 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)