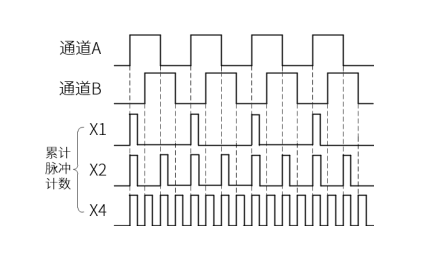
2.1 倍頻技術 編碼器會輸出兩路方波信號,如果只在通道A的上升沿計數,那就是1倍頻;通道A的上升、....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-10 15:28
?7486次閱讀
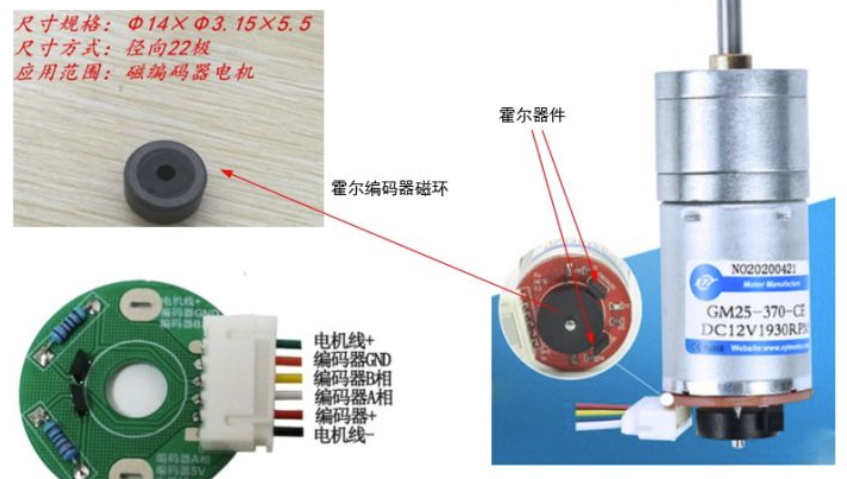
編碼器種類及原理 常見的編碼器有兩種,分別為霍爾編碼器和GMR編碼器。 1.1 霍爾編碼器 霍爾編碼....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-10 15:21
?4188次閱讀
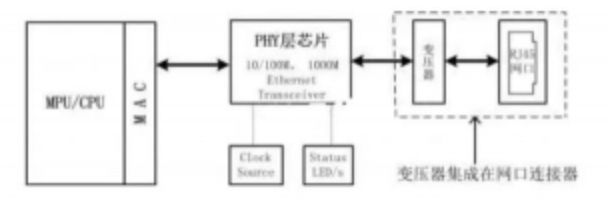
以太網是一種計算機局域網技術。IEEE組織的 IEEE 802.3標準制定了以太網的技術標準,它規定....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-09 18:14
?1971次閱讀
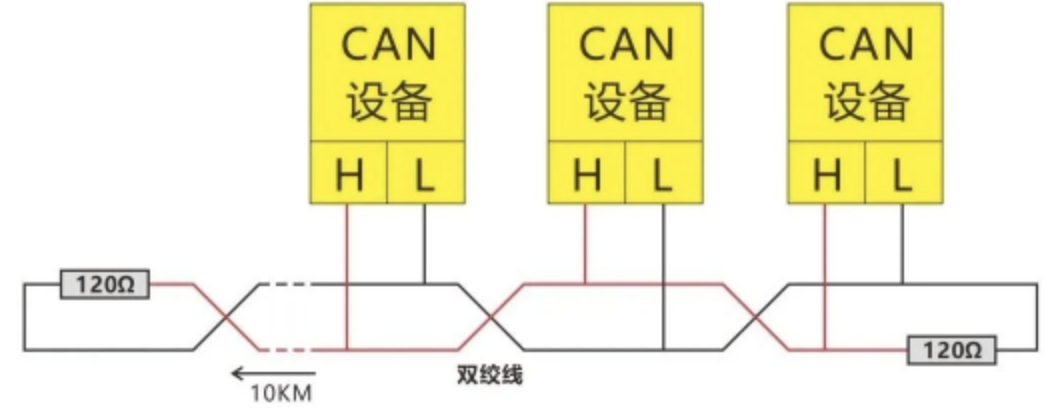
CAN總線 CAN是控制器局域網絡的簡稱,是一種能夠實現分布式實時控制的串行通信網絡。CAN總線的功....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-09 18:11
?2198次閱讀
UART、SPI、I2C比較 I2C線更少,比UART、SPI更為強大,但是技術上也更加麻煩些,因為....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-09 18:06
?1970次閱讀
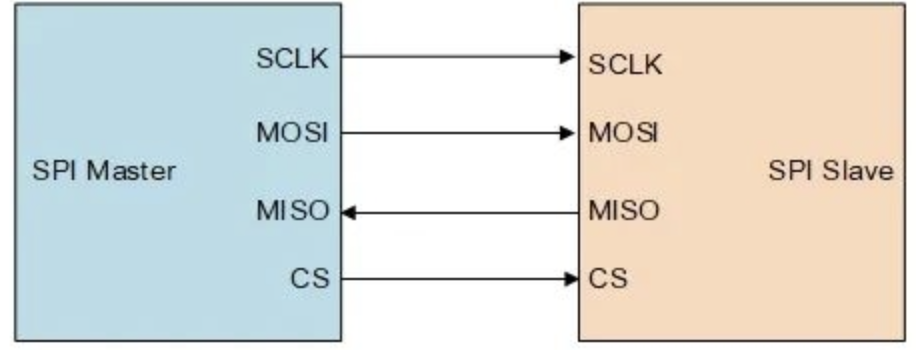
SPI用于CPU與各種外圍器件進行全雙工、同步串行通訊。它只需四條線就可以完成MCU與各種外圍器件的....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-09 17:52
?967次閱讀
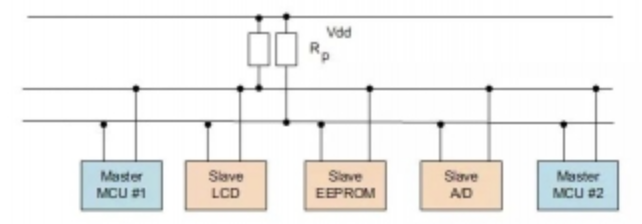
I2C(集成電路總線),由Philips公司(2006年遷移到NXP)在1980年代初開發的一種簡單....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-09 17:48
?992次閱讀
數據幀 對于發送設備和接收設備來說,兩者的串行通信配置應該設置為完全相同。 起始位:起始位是在實際數....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-09 17:42
?1086次閱讀
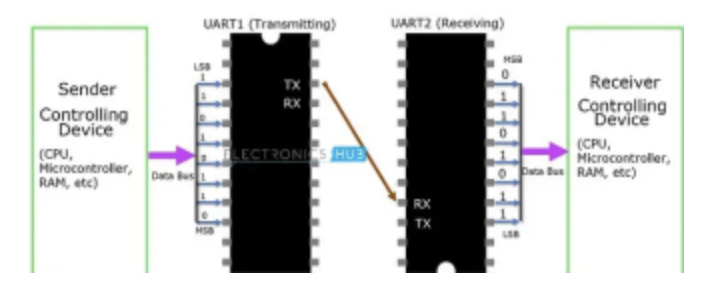
UART通用異步收發器(串口通信) 一般來說,開發過程中我們通常使用串口進行DEBUG調試。 原理 ....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-09 17:32
?1053次閱讀
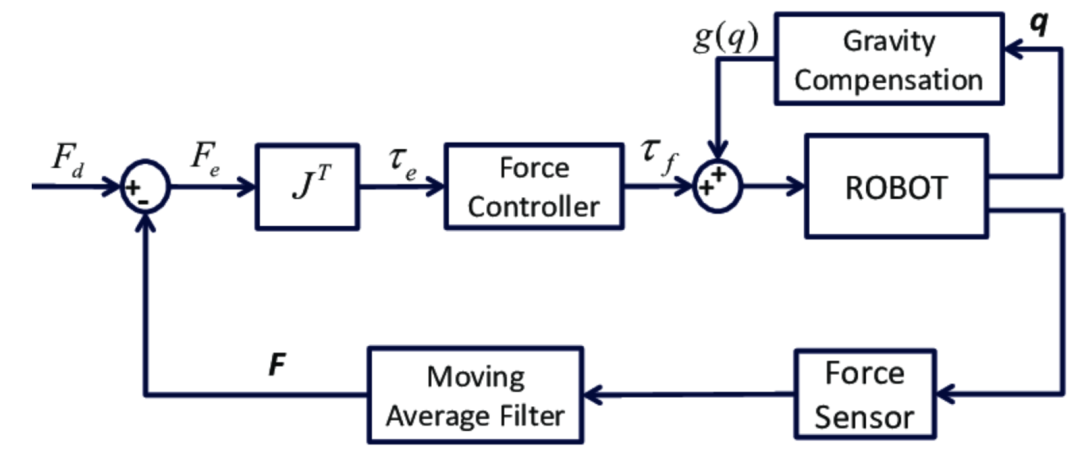
力控制的關鍵問題是如何準確地控制機器人的力或力矩輸出,以滿足特定的任務需求。以下是一些與力控制相關的....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-09 17:26
?1221次閱讀
在機器人速度模式下的外環力矩控制中,通常使用速度環和力矩環兩個控制環路來實現。速度環控制機器人的關節....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-09 17:22
?1054次閱讀
2.1 啟動調試 在程序開始調試之前,要確保程序在gcc、g++編譯時,有如下-g的添加調試信息的選....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-09 17:17
?1180次閱讀
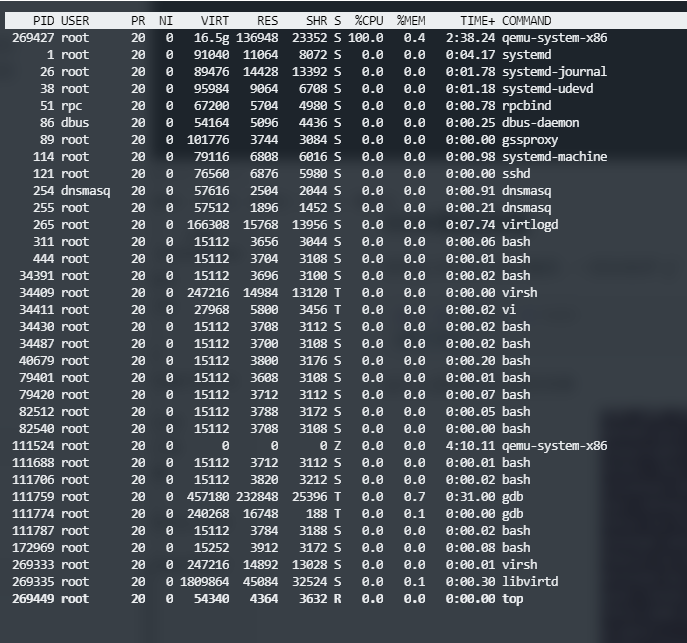
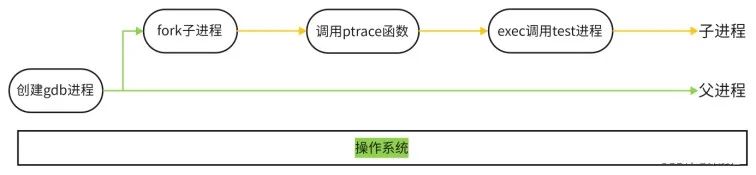
一、GDB調試工具的原理 1.1 未執行進程調試 啟用gdb調試運行gdb ./test的時候,在操....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-09 17:04
?1237次閱讀
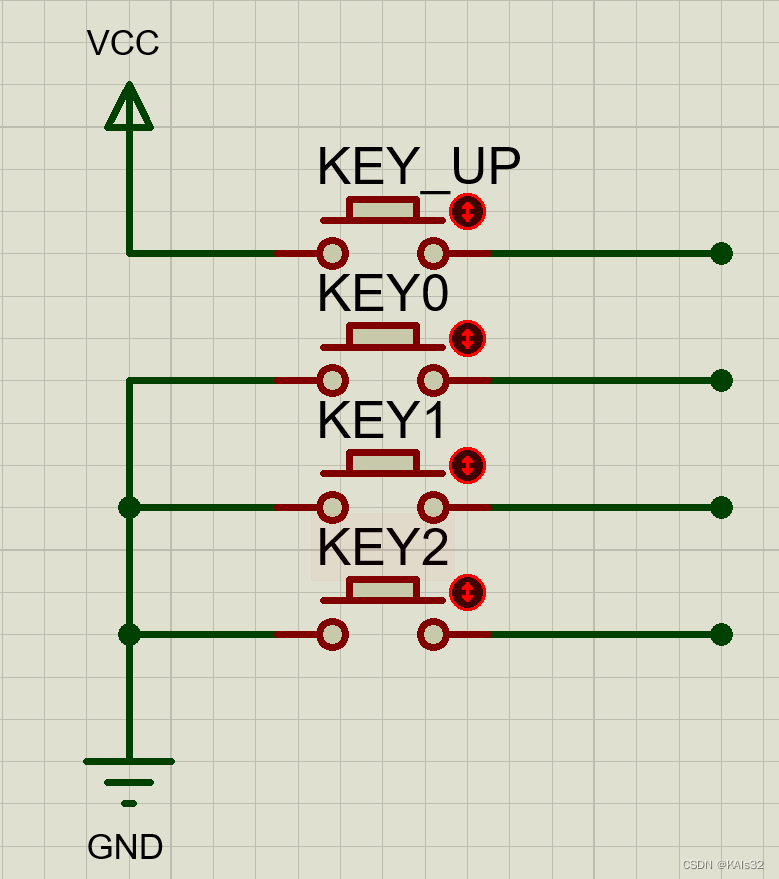
輸出模式下,可由芯片向外輸出電平。例如點亮LED,就需要給LED提供高電平。 GPIO_Mode_O....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-09 16:56
?6295次閱讀
GPIO的介紹 GPIO (general purpose input output)是通用輸入輸出....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-09 16:51
?8072次閱讀
從力與運動的角度,阻抗控制實現規律可以總結如下: 1. 力與位移關系:阻抗控制通過建立力與位移之間的....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-09 16:45
?800次閱讀
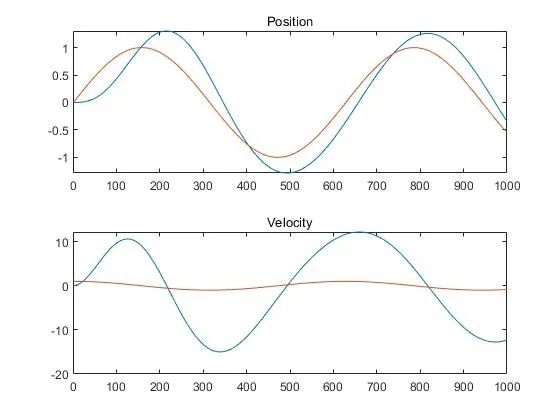
在運動中,位移、速度和加速度與阻抗(慣性、阻尼、剛度)之間存在一定的關系。阻抗控制是一種控制方法,旨....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-09 16:36
?3223次閱讀
力控機器人是一種能夠感知和控制外部力或力矩作用的機器人系統。它具有實時感知和響應外部力的能力,通過傳....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-09 16:25
?703次閱讀
在物理人機交互控制中,常用的性能量化指標包括: 1. 動作準確性(Action Accuracy):....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-09 16:19
?1770次閱讀
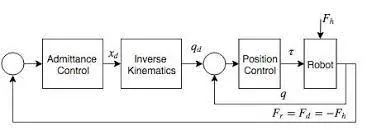
導納控制框架: 力/力矩傳感器:用于測量機器人與環境之間的力和力矩。 導納控制器:根據傳感器測量值和....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-09 16:12
?1489次閱讀
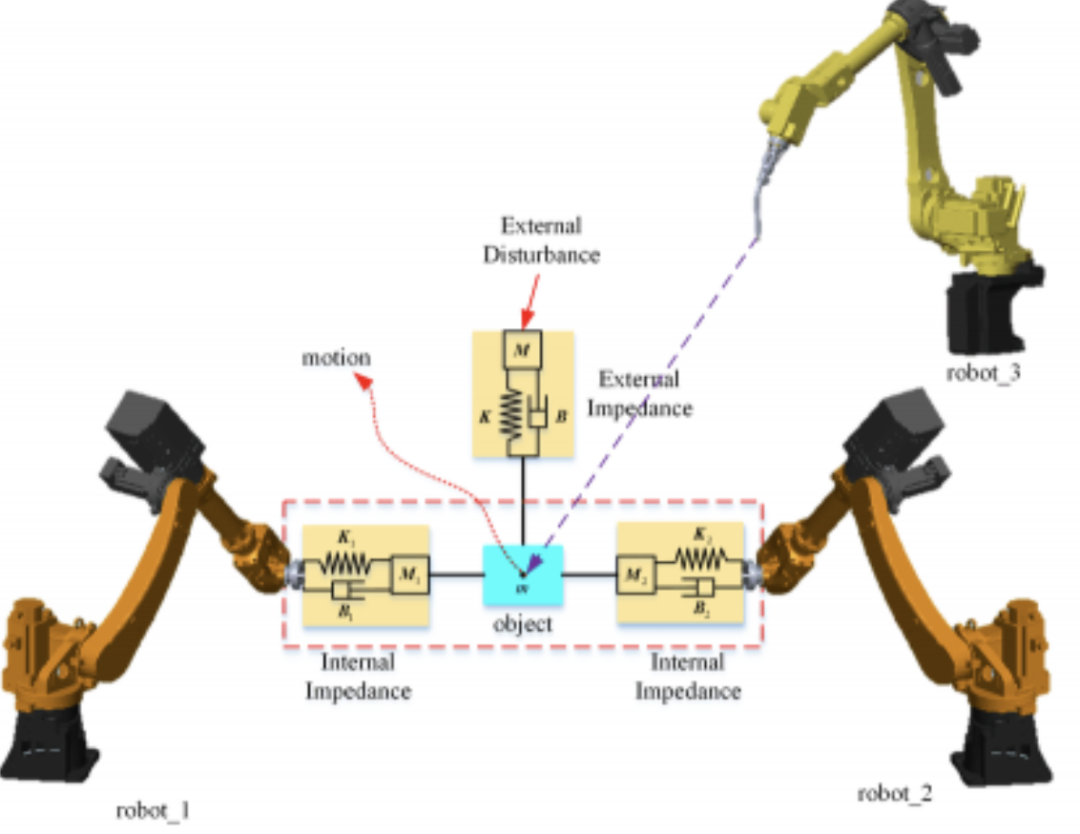
力控機器人常采用柔順控制算法與人/環境/機器人之間進行直接或間接的物理交互,那么,柔順控制能夠操縱被....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-09 15:59
?2054次閱讀

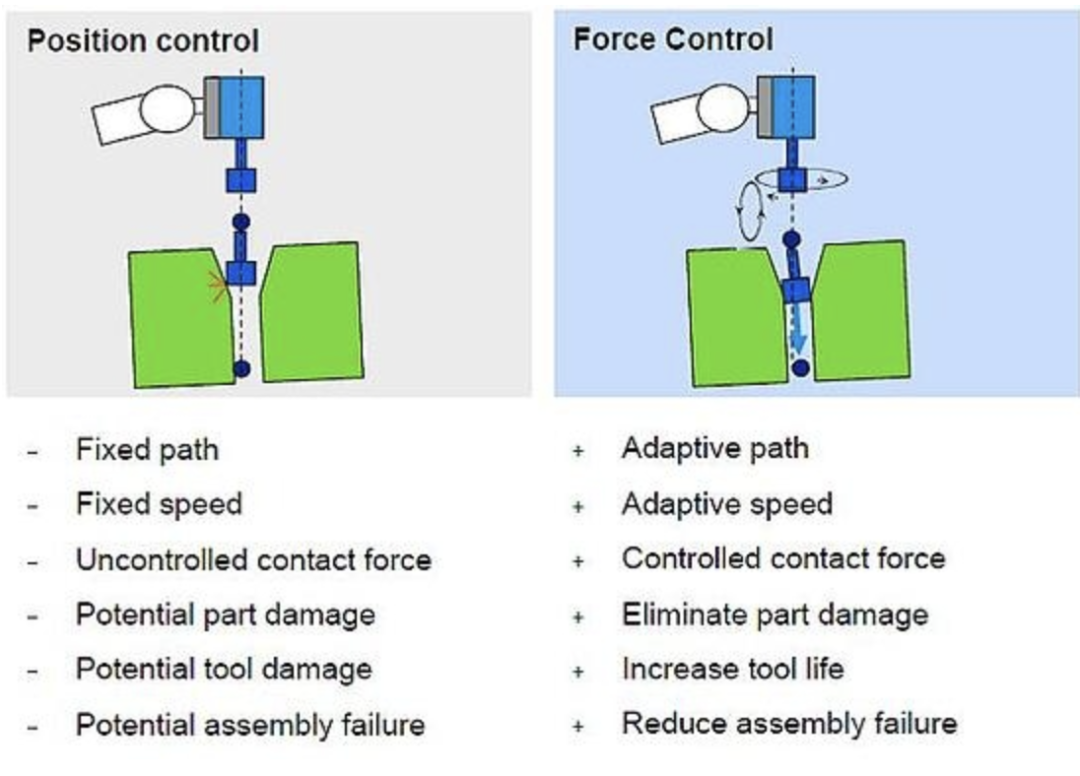
力控機器人是一種能夠基于外部力量進行控制和交互的機器人系統。與傳統的位置控制機器人相比,力控機器人更....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-09 15:54
?894次閱讀
在ros里面,是有專門的工具幫忙做這一步的,但是ros2里面還沒有,不過我看論壇上大家更加推薦使用代....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-09 15:37
?1118次閱讀
1. 選擇哪一種MQTT實現方案 根據前面的介紹,可以知道,要想使用MQTT,必須要有一個服務端。這....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-09 15:29
?1465次閱讀
MQTT 是 Message Queuing Telemetry Transport 的縮寫,是一種....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-09 15:20
?2887次閱讀
在工業機器人中,阻抗控制是一種非常重要的控制方法,主要用于控制機器人的力和位。通過調整阻抗,機器人可....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-08 18:08
?1813次閱讀
六維力傳感器是機器人力控解決方案中應用最廣泛的傳感器之一,其性能更好,成本也相對較高。通過使用六維力....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-08 17:54
?1662次閱讀
搭建機器人關節力控制系統需要以下步驟: 1. 選擇合適的電機和傳感器。電機的選取要符合機器人的要求,....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-08 17:45
?1268次閱讀
力觸覺感知系統在機器人操作中具有非常重要的作用。它可以檢測機器人末端執行器與工件相互作用時產生的三維....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-08 17:37
?1037次閱讀
力控機器人是一種能夠感知力量并具有實時控制能力的機器人系統。 它們可以在與人類進行精準協作和合作時,....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-08 17:25
?1420次閱讀






 工商網監
工商網監