 機器人阻抗控制有幾種方法
機器人阻抗控制有幾種方法
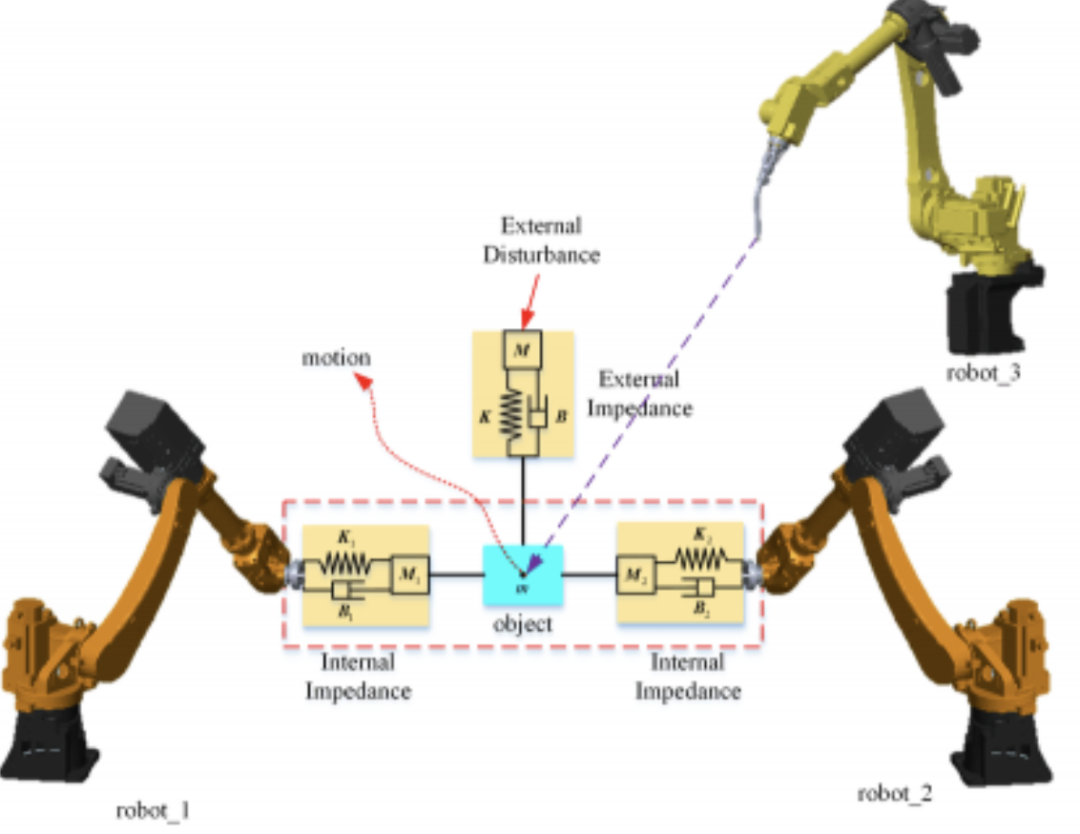
在工業機器人中,阻抗控制是一種非常重要的控制方法,主要用于控制機器人的力和位。通過調整阻抗,機器人可以更好地適應不同的操作環境和任務需求。
阻抗控制的基本思路是:建立一個期望的機器人位置和接觸力的動態響應關系,通過改變阻抗,可以調節機器人與外界的動態作用。
一般來說,機器人阻抗控制主要分為兩種方法:基于位置的阻抗控制和基于力的阻抗控制。
1.基于位置的阻抗控制:讓機器人電機在位置模式下工作,通過發送目標位置和速度實現阻抗特性。這種控制方式主要是為了控制機器人的位置精度和運動軌跡。
2.基于力的阻抗控制:需要讓機器人的電機處于力矩模式工作,需要考慮機器人的動力學模型,直接計算出需要的力矩給驅動器。這種控制方式主要是為了控制機器人與環境之間的作用力和反作用力,從而實現更好的順應性。
在基于力的阻抗控制中,需要使用到機器人力傳感器來測量機器人與環境之間的作用力。
通過這種方式,機器人可以更好地感知其操作環境,并根據實際需要對力和位置進行更為精準的控制。
力覺傳感器在機器人的主動柔順控制中起著至關重要的作用,它們是實現機器人力控制性能必不可少的部件。六維力傳感器是目前在機器人力控解決方案中應用最為廣泛的力覺傳感器。
六維力傳感器能夠同時提供更全面的力信息。這些信息對于實現機器人的精確操作和適應各種不同的任務場景至關重要。
相比之下,電流環在響應精度和速度上均低于力傳感器,因此其適用場景相對有限。
盡管電流環的成本可能較低,但在需要更高精度和更快響應速度的應用中,力傳感器通常是更好的選擇。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
傳感器
+關注
關注
2563文章
52573瀏覽量
763717 -
機器人
+關注
關注
213文章
29489瀏覽量
211556 -
工業
+關注
關注
3文章
2008瀏覽量
47709
發布評論請先 登錄
相關推薦
熱點推薦
機器人視覺——機器人的“眼睛”
為主,盡管機器人開始有搭載攝像頭的趨勢,但對視覺的理解仍然較低,往往需要有明顯的特征點作為輔助,同時抗干擾能力弱,對光照條件,部分遮擋等常見題目不能找到可靠的方法。 機器人技術對圖像理
發表于 01-23 15:02
【機器人在線】一種新型串并聯六自由度噴涂機器人誤差建模引言
的誤差補償器的設計,成本較高,得不到廣泛的應用;一類是控制系統內部軟件補償,這種方法是通過對機器人自身的控制系統進行編程,改變其輸入變量來降低或者消除誤差,由于這
發表于 07-14 15:02
機器人的主要技術參數
空間區域。其形狀取決于機器人的自由度數和各運動關節的類型與配置。機器人的工作空間通常用圖解法和解析法兩種方法進行表示。 4、工作速度 機器人在工作載荷條件下、勻速運動過程中,機械接
發表于 08-15 14:00
工業機器人的工作原理
)機器人的系統結構一臺通用的工業機器人,按其功能劃分,一般由3個相互關連的部分組成:機械手總成、控制器、示教系統,如圖所示。機械手總成是機器人的執行機構,它由驅動器、傳動機構、
發表于 12-15 10:25
給機器人以平衡感的各種方法測量傾角的傳感器
給機器人以平衡感的各種方法測量傾角的傳感器 為機器人提供平衡感的最普通方法之一是用一個傾角傳感器或傾角開關。它可以測量機器人與地心之間的
發表于 10-30 17:10
機器人是什么?
ARM機械手臂有各種形狀和大小。機械臂是機器人的一部分,用來定位末端執行器和傳感器來完成編程任務。許多(但不是全部)類似于人類的手臂,有肩膀,肘部,手腕,甚至手指。這給了機器人很多
發表于 03-31 10:31
常用的機器人編程方法有哪些
機器人編程【robotprogramming】為使機器人完成某種任務而設置的動作順序描述。機器人運動和作業的指令都是由程序進行控制,常見的編制方法
發表于 08-15 17:41
?1.7w次閱讀

機器人阻抗控制實現規律
從力與運動的角度,阻抗控制實現規律可以總結如下: 1. 力與位移關系:阻抗控制通過建立力與位移之間的關系來實現控制。 這種關系可以使用彈簧-
工業機器人控制方式有幾種
工業機器人的控制方式多種多樣,這些方式根據作業任務的不同而有所區別。主要可以分為以下幾種:點位控制方式、連續軌跡控制方式、力(力矩)





 工商網監
工商網監
評論