
接口的定義 通信接口的作用
通信接口 在ROS系統(tǒng)中,無論話題還是服務(wù),或者我們后續(xù)將要學(xué)習(xí)的動(dòng)作,都會用到一個(gè)重要的概念——通....
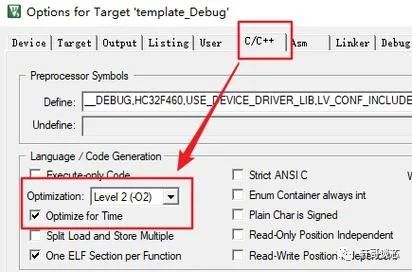
應(yīng)對分支預(yù)測有哪些優(yōu)化措施
應(yīng)對分支預(yù)測有哪些優(yōu)化措施 下面再來看一下分支預(yù)測,這也是 ChatGPT 給出的一個(gè)簡易答案 //....
CPU中什么是分支預(yù)測
什么是分支預(yù)測 在超標(biāo)量的流水線架構(gòu)上,我們得知,CPU 在運(yùn)行指令的時(shí)候,會在一個(gè)時(shí)鐘上做多個(gè)操作....
GD32H7如何利用超標(biāo)量流水線
我們拿一個(gè)算法的代碼實(shí)現(xiàn)來舉例子,首先我們寫一個(gè)求階乘的子函數(shù),這里我偷懶讓 ChatGPT 幫忙生....
H7的特點(diǎn) 什么是超標(biāo)量流水線
一、H7 的特點(diǎn) 首先看看 M7 內(nèi)核的 GD32H7都具備哪些不一樣的功能,以下只是我個(gè)人關(guān)注的點(diǎn)....


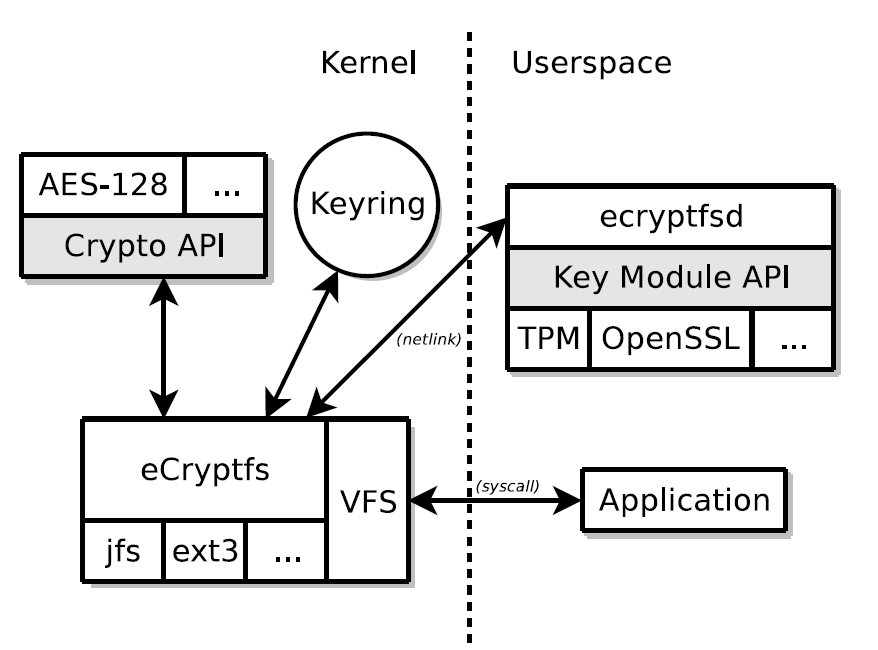
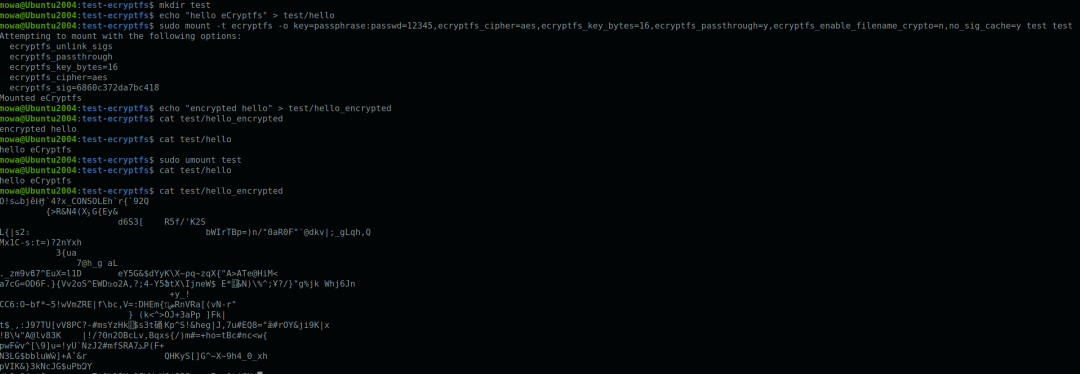
eCryptfs整體架構(gòu)和核心加解密機(jī)制介紹
整體架構(gòu) eCryptfs整體架構(gòu)如下圖,主要是內(nèi)核模塊eCryptfs以及用戶態(tài)進(jìn)程ecryptf....
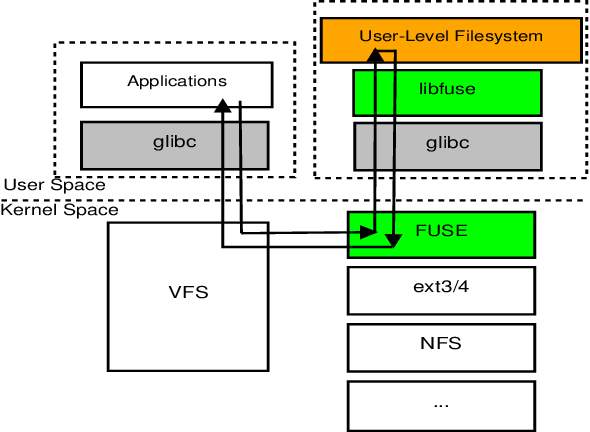
Linux系統(tǒng)中的FBE實(shí)現(xiàn)方案和特點(diǎn)
Linux系統(tǒng)FBE 從Linux系統(tǒng)軟件架構(gòu)看,典型FDE和FBE實(shí)現(xiàn)方案分布如下圖,包括基于dm....

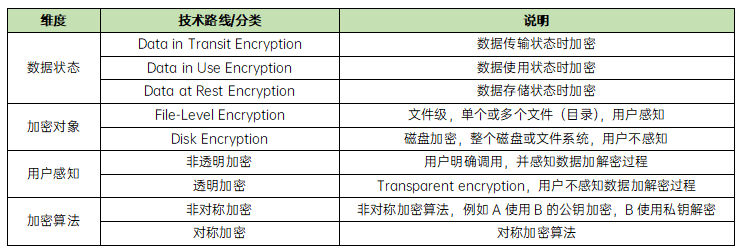
FDE磁盤加密技術(shù)是什么
磁盤加密技術(shù) 如上節(jié)所述,Disk Encryption磁盤加密,目標(biāo)是保護(hù)數(shù)據(jù)at Rest狀態(tài)下....

智能車中電磁歸一化該怎么處理
歸一化處理 很多一開始的小白,在做電磁這一部分時(shí),可能并不太知道歸一化,只是通過濾波算法處理后就用解....
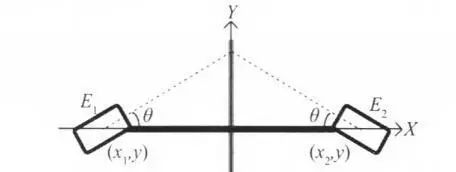
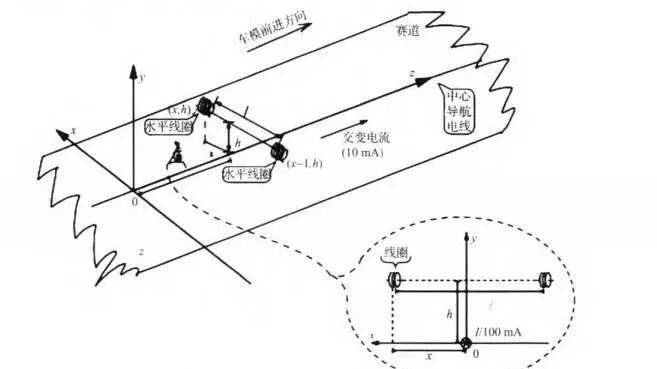
工字電感分布認(rèn)知 雙水平電感排布方案
工字電感 感應(yīng)賽道交變磁場,產(chǎn)生感應(yīng)電動(dòng)勢,后續(xù)電路通過對感應(yīng)電動(dòng)勢進(jìn)行一些列的選頻、放大、檢波,得....
TogetherROS目標(biāo)檢測運(yùn)行方法
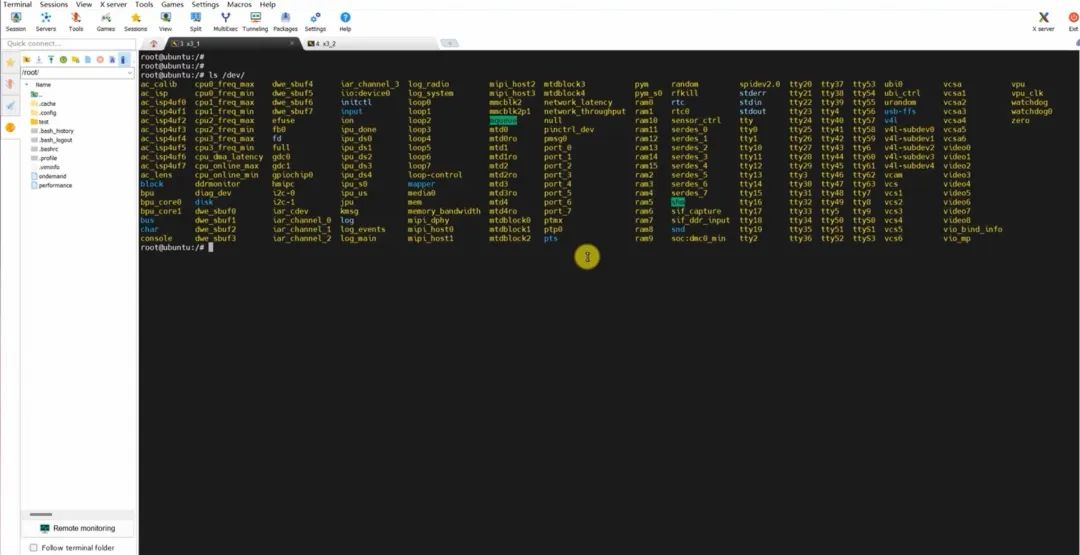
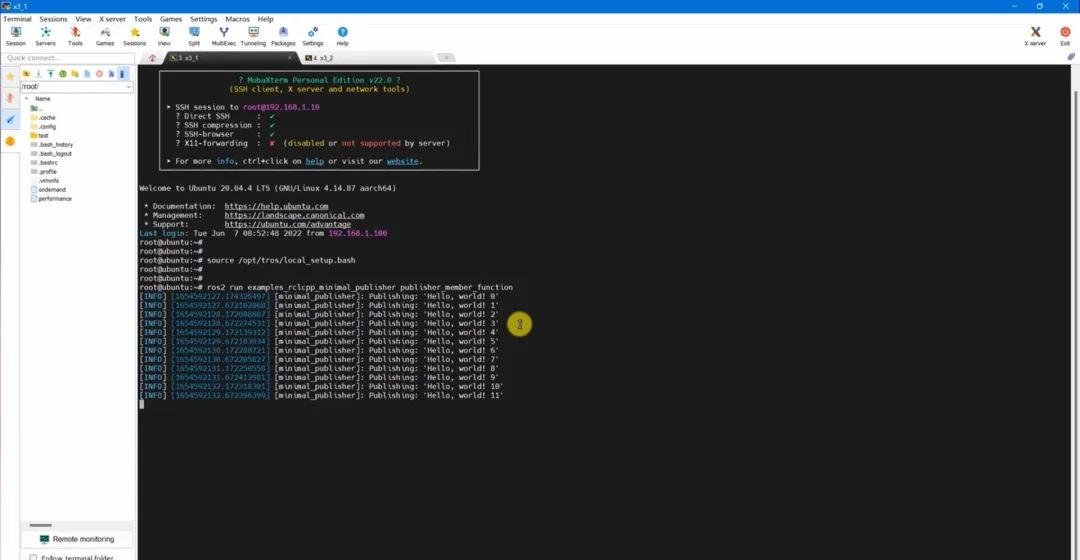
接下來,我們就運(yùn)行一個(gè)更為直觀的案例——目標(biāo)檢測。 在這個(gè)案例中,需要大家找一個(gè)USB的相機(jī),連接到....

PID算法的代碼實(shí)現(xiàn)
PID算法的代碼實(shí)現(xiàn) 舵機(jī)控制 在對舵機(jī)的控制中,我采用的是位置式PD算法。 將左右電感的偏差值賦給....
電磁循跡中什么是歸一化
什么是歸一化 歸一化就是將所有數(shù)據(jù)都變成0-1之間的數(shù),將數(shù)據(jù)映射到0~1范圍之內(nèi)處理,使數(shù)據(jù)觀察更....
什么是濾波 常見的軟件濾波辦法
采樣信號濾波 什么是濾波 濾波(Wave filtering)是將信號中特定波段頻率濾除的操作,是抑....
ROS模型建立常見錯(cuò)誤
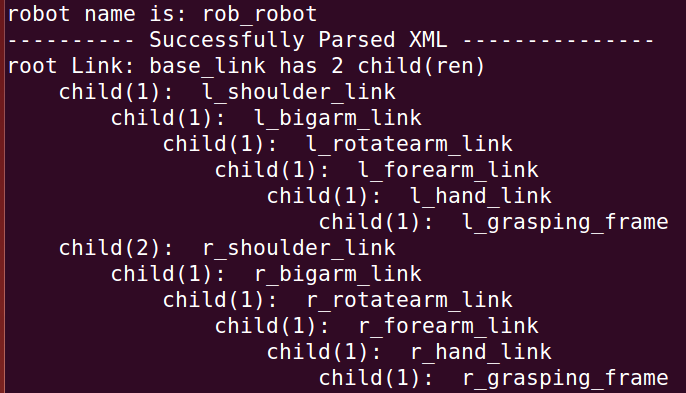
將 XACRO文件轉(zhuǎn)換成 URDF 文件 并檢查 轉(zhuǎn)換的方法很簡單,ROS封裝了實(shí)現(xiàn)方法,我們只需進(jìn)....
機(jī)器人模型其他關(guān)節(jié)的定義
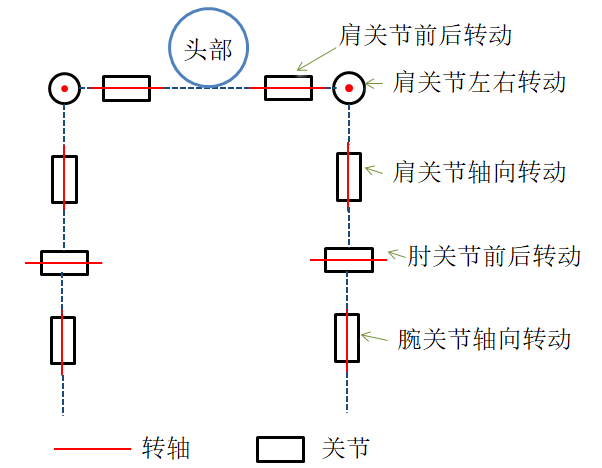
base_link的定義 base_link是所有的其他關(guān)節(jié)的基礎(chǔ),也就是基坐標(biāo)系所在的link。 ....
機(jī)器人的ROS模型建立
這個(gè)系列主要介紹機(jī)器人ROS模型的建立方法,ROS系統(tǒng)帶來的好處之一就是: 我們無需自己建立復(fù)雜的數(shù)....
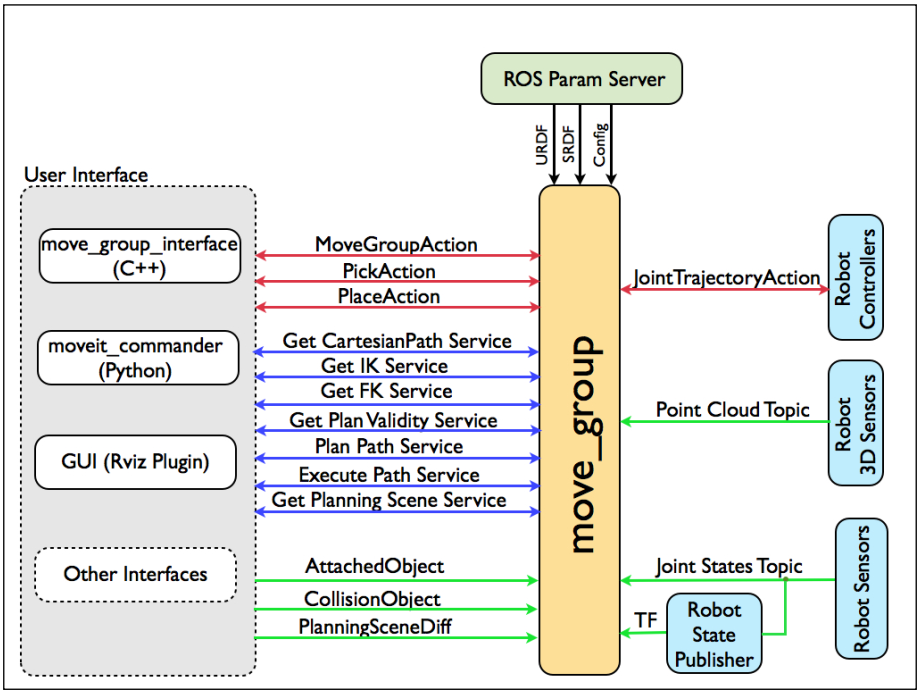
ROS系統(tǒng)的MoveIt模塊介紹
機(jī)器人操作系統(tǒng)ROS目前最受關(guān)注的兩個(gè)模塊是導(dǎo)航(Navigation)和機(jī)械臂控制(MoveIt!....
PCL匹配器濾除點(diǎn)云方法
匹配器 2.1 ICP點(diǎn)云精配準(zhǔn) template typename PointCloudPtr >....
PCL濾波配準(zhǔn)常用的濾波方式
最近在看PCL濾波配準(zhǔn)等操作,之前在自動(dòng)駕駛-激光雷達(dá)預(yù)處理/特征提取和提到了一些濾除點(diǎn)云等操作,但....
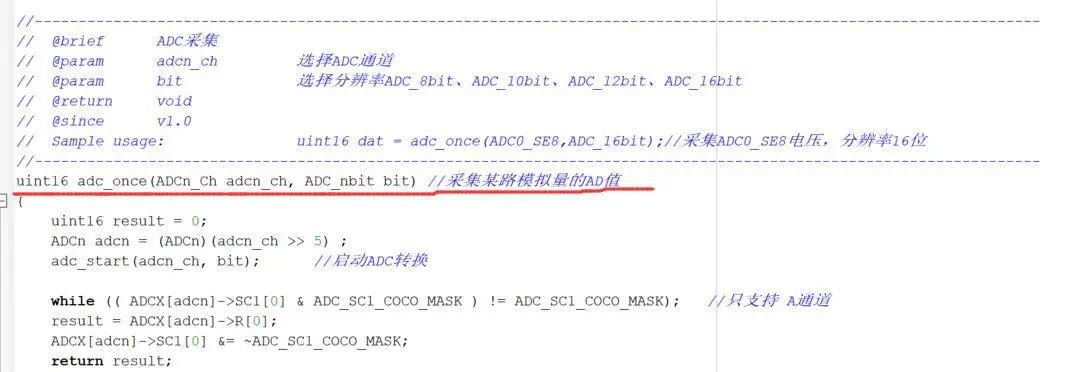
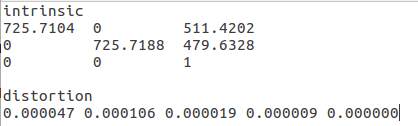
采集激光雷達(dá)如何提取照片中的角點(diǎn)像素
提取照片中的角點(diǎn)像素 首先需要把最上面獲得的相機(jī)內(nèi)參畸變糾正參數(shù)以下圖的格式保存在 data/par....





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)