 TogetherROS系統的通信功能測試
TogetherROS系統的通信功能測試
通信測試
先來測試一下TogetherROS?·Bot系統的通信功能。
我們需要啟動兩個終端,分別連接到旭日X3派上,并分別按以下命令配置環境變量。
終端1:
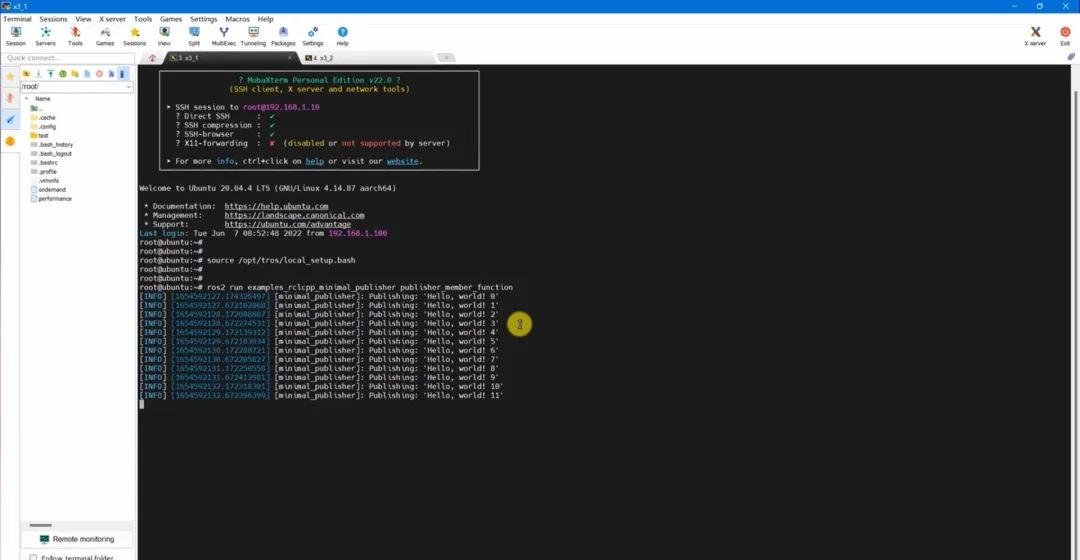
** source /opt/tros/local_setup.bash** ros2 run examples_rclcpp_minimal_publisher publisher_member_function
終端2:
** source /opt/tros/local_setup.bash** ros2 run examples_rclcpp_minimal_subscriber subscriber_member_function
接下來,我們用ros2 run命令運行節點:
運行第一個例程:
ros2 run example_rclcpp_minimal_publisher publisher_member_function
這是一個用C++寫的最小化的發布者程序,其中節點叫publisher_member+function,按回車運行該節點。
可以看到這個節點開始不斷循環發布信息,每次發布的信息為字符串形式,內容是“Hello,world! +數字”。
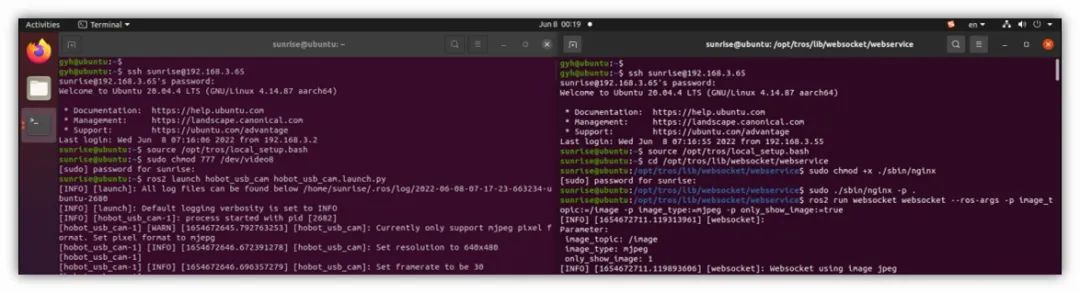
同樣,在終端2的命令行窗口,輸入以下命令并回車開啟訂閱者節點。
ros2 run examples_rclcpp_minimal_subscriber subscriber_member_function
這個訂閱者節點會獲取到、并顯示出剛才發布者節點發布的信息。

通過這樣一個例程,我們驗證了兩個節點之間的通信沒有問題。這這是一個基于DDS的話題通信。
按CTRL+C可以關閉該例程。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
機器人
+關注
關注
213文章
29475瀏覽量
211529 -
ROS
+關注
關注
1文章
284瀏覽量
17556 -
系統
+關注
關注
1文章
1029瀏覽量
21705
發布評論請先 登錄
相關推薦
熱點推薦
VXI/GPIB總線的通信設備測試診斷系統設計
。兩者結合使系統的通用性,功能及測量帶寬的擴充性和電磁兼容能力進一步提高。因此,航天測控通信設備測試診斷系統采用以VXI總線為主,GPIB為
發表于 11-16 15:08
無線通信系統的安裝維護測試
無線通信系統的安裝維護測試要求體積小、重量輕、操作簡單、電池續航時間長的儀 器儀表,對性能指標沒有臺式儀器儀表那么嚴格。配備有網絡分析儀和頻譜儀的手持 式儀表幾乎可以滿足安裝維護所有測試
發表于 10-27 09:52
數據通信測試儀表功能概述
調制解調器、用戶終端設備等。在網絡建設中進行系統連接、安裝調試、網絡驗收時,在網絡建成后的維護檢查、判斷和排除故障時,都離不開測試儀表。數據通信測試儀表主要有
發表于 06-21 06:35
LabVIEW系統設計和RF通信
通常能夠跨越設計過程各個階段和功能的工具都嘗試著減少每個階段和功能之間的限制,而不是創建可跨越所有階段和功能的單一環境和語言。例如,在新興的 RF 通信標準開發中,
發表于 10-17 16:42
?8次下載


納特通信的多探頭球面近場測試系統與緊縮場測試系統(遠場)
納特通信承建國內首套192探頭近場測試系統;納特通信承建國內首套5G 3米靜區緊縮場測試系統
TogetherROS Bot相機驅動方法
TogetherROS?·Bot相機驅動 除此之外,TogetherROS?·Bot中也提供了USB攝像頭的驅動節點,連接攝像頭之后,直接設置設備的權限和TogetherROS的環境變量就可以使用了
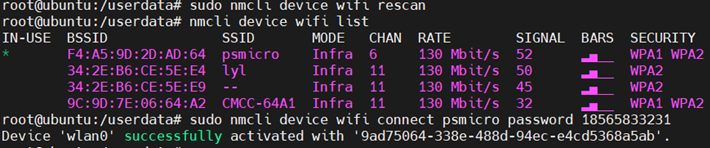
TogetherROS系統中如何配置網絡連接
無論是旭日X3派,還是TogetherROS,在正式使用之前,都還需要進行一些必要的配置,完善必要的功能模塊,提供完整的算力支持,達到最佳狀態。 網絡連接 第一個配置,是無線網絡連接。 當然,大家也
在TogetherROS中如何安裝ROS2功能包
安裝ROS2功能包 接下來,還有一個很重要的配置,那就是安裝ROS2功能包,我們說TogetherROS是基于ROS2深度優化的,很多模塊還是會復用ROS2中的功能,所有ROS2的原生

NB-IOT類產品的通信功能生產測試方案
的影響。 在這個階段,測試人員會精心設計一系列的測試用例,涵蓋了不同的網絡環境、數據傳輸量以及通信協議等方面。通過模擬真實的使用場景,對 NB 產品的 Socket 通信






 工商網監
工商網監
評論