") ROS2中自帶例程測試
ROS2中自帶例程測試
如果你是一個ROS2的開發(fā)者,可能對剛才我們使用的ROS2命令比較熟悉,這時你可能也會產(chǎn)生一個問題:我們之前也安裝了ROS2系統(tǒng),那ROS2的原生功能還可以正常運行么?
我們再來試一試ROS2中自帶的一個例程。
和剛才一樣打開兩個終端,這里我們需要source一下ROS里的環(huán)境變量。
該環(huán)境變量我們剛才已經(jīng)設置了過軟連接,所以配置過程中它也會配置ROS2的功能包路徑。
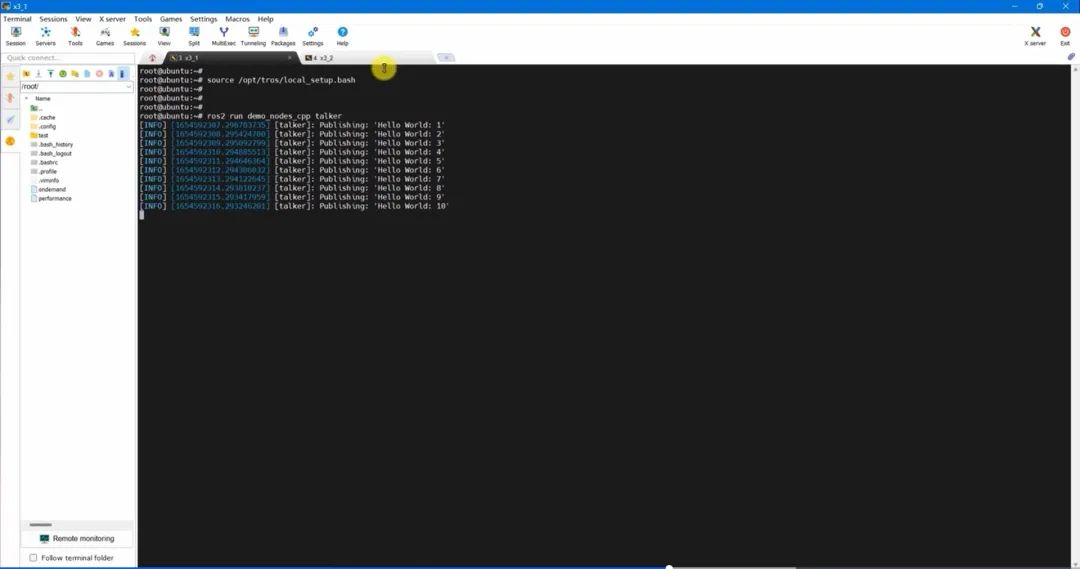
在終端1輸入命令:
$ source /opt/tros/local_setup.bash
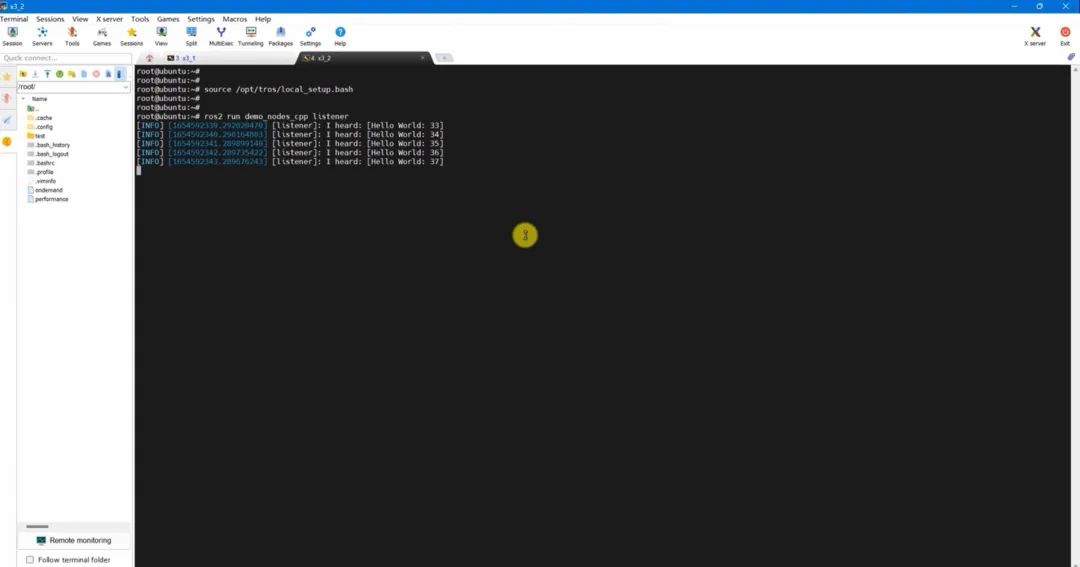
在終端2,也輸入同樣的命令,配置環(huán)境變量的腳本:

接下來運行兩個ROS2的節(jié)點。
這兩個節(jié)點的功能包是屬于ROS2里的功能包,可以直接調(diào)用到。
我們來嘗試一下輸入命令ros2 run,再輸入功能包名稱,如果按Tab自動補全文件名,說明可以找到對應的這個功能包:
ros2 run demo_nodes_cpp talker
talker也是一個發(fā)布者節(jié)點。按回車運行,可以看到終端1的發(fā)布者節(jié)點以每秒1次的頻率發(fā)布消息。
同樣,我們到終端2中打開訂閱者節(jié)點:
ros2 run demo_nodes_cpp listener
回車運行,很快兩個終端間就建立了通訊。
這樣就使用ROS2里的例程實現(xiàn)了話題通信連接,只不過這里我們使用的就是ROS2原生的功能包了,而不是TogetherROS?·Bot的功能。
通信系統(tǒng)已經(jīng)沒問題了,但看上去似乎還不太直觀。
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權轉載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學習之用,如有內(nèi)容侵權或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
機器人
+關注
關注
213文章
29475瀏覽量
211530 -
程序
+關注
關注
117文章
3820瀏覽量
82396 -
ROS
+關注
關注
1文章
284瀏覽量
17556
發(fā)布評論請先 登錄
相關推薦
熱點推薦
Micro-ROS:把ROS2放在MCU上
機器人的發(fā)展。 ? ROS便是為機器人在研發(fā)的過程中的代碼復用提供支持的開源框架,大量的機器人開源項目,從感知到控制、從定位到構圖、從導航到可視化,幾乎都使用ROS作為基礎。 ? Micro-
系統(tǒng)鏡像Ubuntu_ROS2中ROS2是什么意思,帶有ROS2開發(fā)環(huán)境嗎?
請問一下,百度文庫資料里面,下圖所示的系統(tǒng)鏡像Ubuntu_ROS2中ROS2是什么意思,帶有ROS2開發(fā)環(huán)境嗎?與前面4GB版本的鏡像有什么區(qū)別?
發(fā)表于 03-01 23:06
如何在ROS2中運行小烏龜呢
在ROS2中運行小烏龜,其實主要就是安裝兩個工具,turtlesim和rqt。A: 安裝turtlesim。輸入【sudo apt update】輸入【sudo apt install
發(fā)表于 11-05 06:08
基于無線wifi網(wǎng)絡的X3派和PC虛擬機通過ROS2實現(xiàn)跨設備通信
1、X3派和PC虛擬機都連接無線wifi網(wǎng)絡的情況下通過ROS2實現(xiàn)跨設備通信多機通信是ROS的基礎能力之一,相比于ROS1,ROS2通過非常簡單的配置即可實現(xiàn)多機通信。對于兩個安裝了
發(fā)表于 07-13 15:13
教你一步步創(chuàng)建自己的ROS2工作空間應用
,IP地址替換為自己的實際IP地址。ssh [email protected]、在X3派中執(zhí)行下面的命令腳本進行系統(tǒng)的更新以及ROS2編譯環(huán)境依賴安裝apt -y update &
發(fā)表于 11-24 15:00
【昉·星光 2 高性能RISC-V單板計算機體驗】五:在 VisionFive2 上體驗 ROS2 humble
Call `ros2 <command> -h` for more detailed usage.
二、基礎命令測試
ros2 pkg
執(zhí)行 ros2 pkg
發(fā)表于 09-04 04:59
Linux嵌入式開發(fā)筆記(六)在ROS2中運行小烏龜實例
在ROS2中運行小烏龜,其實主要就是安裝兩個工具,turtlesim和rqt。A: 安裝turtlesim。輸入【sudo apt update】輸入【sudo apt install
發(fā)表于 11-02 15:21
?10次下載

ROS2中使用Gtes示例的詳細講解
阿里云官方鏡像站:ROS2源 https://developer.aliyun.com/mirror/?utm_content=g_1000303593 一、準備工作 創(chuàng)建工作空間,即編寫代碼的位置
發(fā)表于 11-12 12:04
?1182次閱讀
Window10怎么安裝ROS2
Window10怎么安裝ROS2,以下的操作都要管理員的權限,我可以提前劇透,我應該應該是沒有安裝上DDS,應該是算安裝好了80%的樣子。
了解ROS2是什么
ROS2是從底層構建時便考慮使其適用于商業(yè)用途,它是機器人操作系統(tǒng)現(xiàn)有框架的重構,經(jīng)過優(yōu)化以適用于工業(yè)應用,開發(fā)可在新的應用中進行擴展,如移動機器人、無人機群和自動駕駛汽車。
DDS在ROS2中的應用
DDS在ROS2中的應用 DDS在ROS2系統(tǒng)中的位置至關重要,所有上層建設都建立在DDS之上。在這個ROS2的架構圖中,藍色和紅色部分就是

ros1和ros2的通信模型
數(shù)據(jù) ROS2: 參與者(DomainParticipant):一個參與者Participant就是一個容器,對應于一個使用DDS的用戶,任何DDS的用戶都必須通過Participant來訪問全局

在TogetherROS中如何安裝ROS2功能包
安裝ROS2功能包 接下來,還有一個很重要的配置,那就是安裝ROS2功能包,我們說TogetherROS是基于ROS2深度優(yōu)化的,很多模塊還是會復用ROS2






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論