補充一下一個使用自旋表作為啟動方式的平臺設備樹cpu節點: arch /arm64/ boot /d....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 12-05 16:19
?1079次閱讀
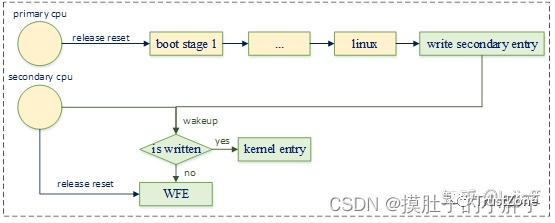
secondary cpu執行流程 aarch64架構secondary cpu的內核入口函數為se....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 12-05 16:12
?1217次閱讀

cpu操作函數 cpu_ops函數由bringup_cpu調用,以觸發secondary cpu啟動....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 12-05 16:04
?1197次閱讀
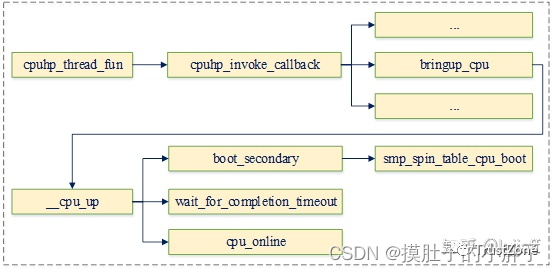
hotplug回調線程喚醒 內核使用以下流程喚醒特定cpu的hotplug線程,用于執行實際的cpu....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 12-05 15:55
?659次閱讀

啟動secondary cpu 內核在啟動secondary cpu之前當然需要為其準備好執行環境,....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 12-05 15:46
?860次閱讀
spin_table_cpu_release_addr的傳遞 由于在armv8架構下, uboot只....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 12-05 15:32
?642次閱讀

spin-table spin-table啟動流程的示意圖如下: 芯片上電后primary cpu開....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 12-05 15:27
?1472次閱讀
SMP是什么? SMP 英文為Symmetric Multi-Processing ,是對稱多處理結....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 12-05 15:23
?2849次閱讀
之前對這個uboot的源碼了解有些許遺忘。最近做AVB校驗,需要uboot到kernel的這個過程。....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 12-04 17:53
?3802次閱讀
? 1.uboot 調用do_bootm_linux 中的 theKernel (0, machid....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 12-04 17:45
?828次閱讀
一個cmd_tbl_t結構體變量包含了調用一條命令的所需要的信息。 ? 對于環境變量bootcmd,....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 12-04 17:37
?969次閱讀

Bootm命令用來從memory啟動內核,bootm命令的執行流程如下圖所示。 在串口終端輸入boo....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 12-04 17:33
?1513次閱讀
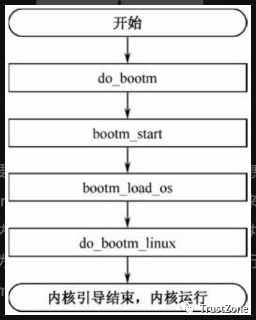
U-boot是通過執行u-boot提供的命令來加載Linux內核的,其中 命令bootm的功能 即為....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 12-04 17:31
?1095次閱讀
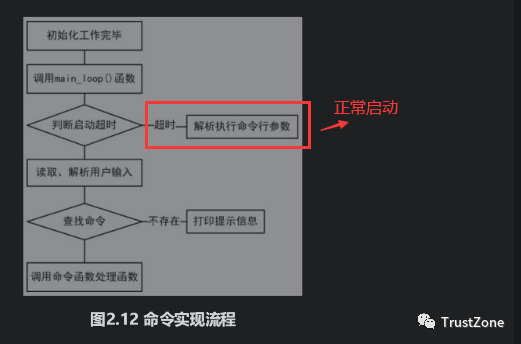
命令處理 main.c中的代碼實現了將一個命令的所有參數分離存放在argv數組中,參數的數目為arg....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 12-04 17:23
?718次閱讀
1.啟動延時 如果配置了啟動延遲功能,U-Boot等待用戶從控制臺(一般為串口)輸入字符,等待的時間....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 12-04 17:16
?2059次閱讀
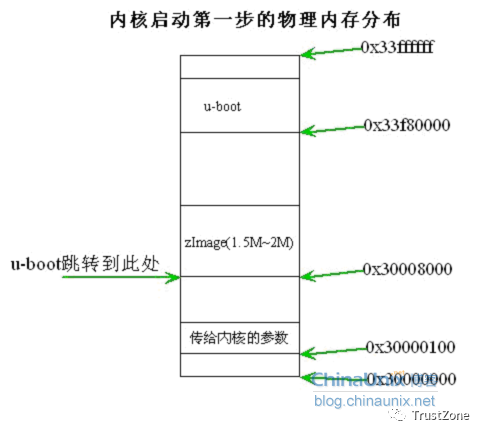
zImage內核鏡像下載到開發板之后,可以使用u-boot的go命令進行直接跳轉,這個時候內核直接解....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 12-04 17:09
?638次閱讀
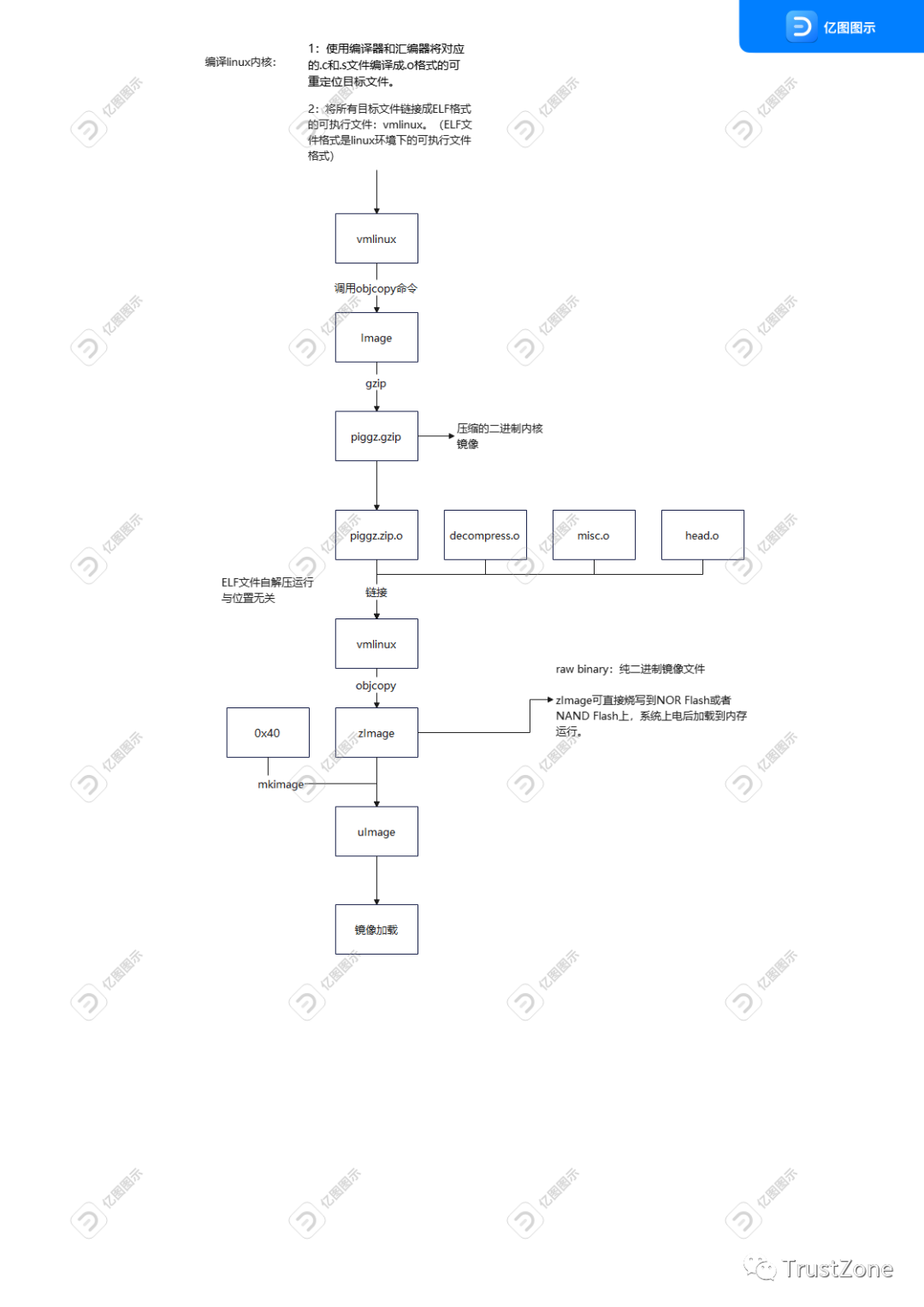
首先我們知道kernel的鏡像最開始是壓縮的zImage格式的存在,然后Uboot有工具mkimag....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 12-04 17:02
?659次閱讀
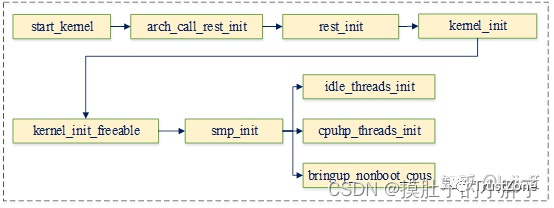
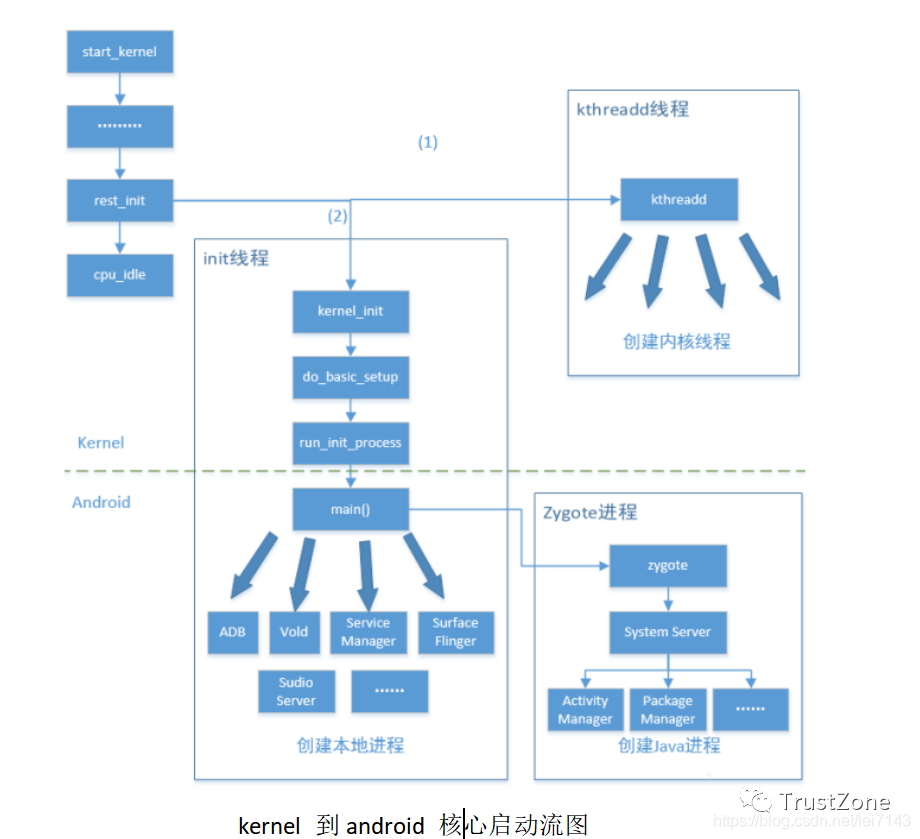
總結一個圖:kernel 到android核心啟動過程 kernel鏡像執行跳轉到start_ker....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 12-04 16:59
?1460次閱讀
kernel的啟動主要分為兩個階段。 1、階段一 從入口跳轉到start_kernel之前的階段。 ....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 12-04 16:45
?967次閱讀
相比手機、電腦等通用平臺,機器人的類型可是千變萬化,構建機器人操作系統的難度就遠比手機和電腦的操作系....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 12-01 17:20
?769次閱讀
驗證ROS是否安裝成功 按正常來說ROS到這里就安裝完成了,現在我們來驗證一下,輸入以下命令: ro....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 12-01 16:51
?8380次閱讀
設置環境變量 輸入下面的這行代碼,注意到底是melodic還是noetic或者是kinetic是由你....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 12-01 16:34
?1908次閱讀
初始化rosdep 輸入以下的命令,先對其初始化一下 sudo rosdep init 如果出現以下....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 12-01 16:22
?1284次閱讀

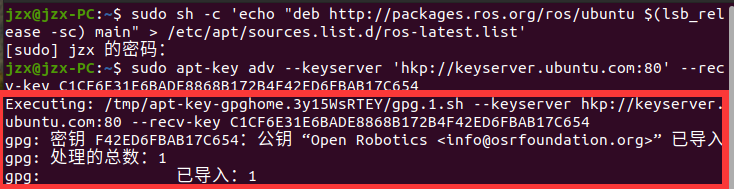
1.添加ROS軟件源 將下面這條命令復制到ubuntu的終端執行 sudo sh -c '. /et....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 12-01 16:14
?2580次閱讀
安裝ROS2功能包 接下來,還有一個很重要的配置,那就是安裝ROS2功能包,我們說TogetherR....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 12-01 16:02
?1389次閱讀

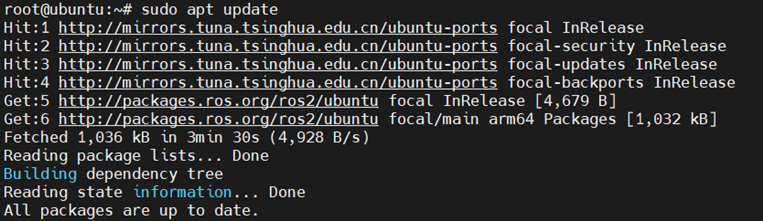
系統更新 第二個配置,是更新當前旭日X3派所使用的Ubuntu鏡像,和在電腦上使用的命令相同。 我們....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 12-01 15:44
?1240次閱讀
無論是旭日X3派,還是TogetherROS,在正式使用之前,都還需要進行一些必要的配置,完善必要的....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 12-01 15:39
?710次閱讀
話題接口的定義與使用 話題通信接口的定義也是類似的,繼續從之前的機器視覺案例中來衍生,我們想把服務換....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 12-01 15:32
?694次閱讀

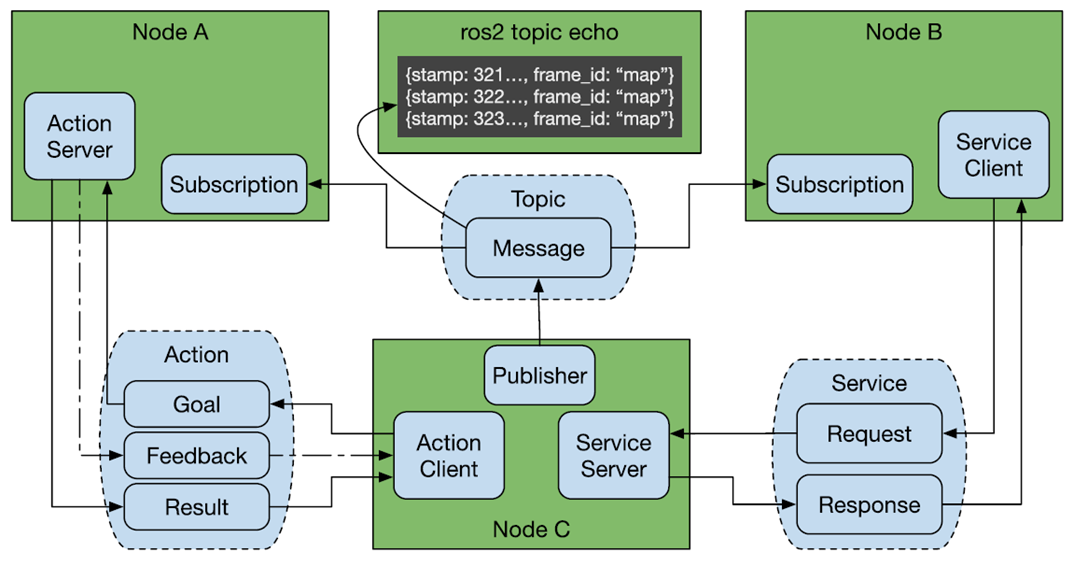
了解了通信接口的概念,接下來我們再從代碼實現的角度,研究下如何定義以及使用一個接口。 在之前服務概念....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 12-01 15:28
?733次閱讀

ROS通信接口 接口可以讓程序之間的依賴降低,便于我們使用別人的代碼,也方便別人使用我們的代碼,這就....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 12-01 15:03
?1232次閱讀






 工商網監
工商網監