") 機器人關(guān)節(jié)Joint描述
機器人關(guān)節(jié)Joint描述
機器人模型中的剛體最終要通過關(guān)節(jié)joint連接之后,才能產(chǎn)生相對運動。
URDF中的關(guān)節(jié)有六種運動類型。
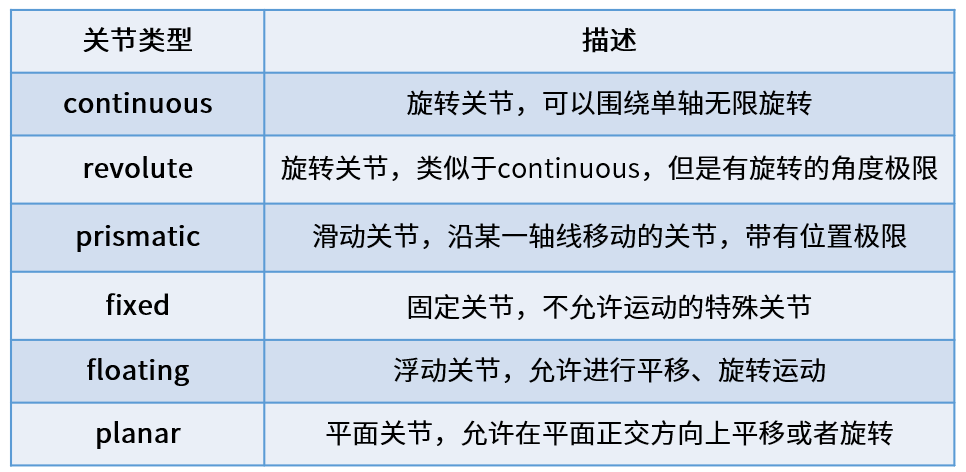
continuous,描述旋轉(zhuǎn)運動,可以圍繞某一個軸無限旋轉(zhuǎn),比如小車的輪子,就屬于這種類型。
revolute,也是旋轉(zhuǎn)關(guān)節(jié),和continuous類型的區(qū)別在于不能無限旋轉(zhuǎn),而是帶有角度限制,比如機械臂的兩個連桿,就屬于這種運動。
prismatic,是滑動關(guān)節(jié),可以沿某一個軸平移,也帶有位置的極限,一般直線電機就是這種運動方式。
fixed,固定關(guān)節(jié),是唯一一種不允許運動的關(guān)節(jié),不過使用還是比較頻繁的,比如相機這個連桿,安裝在機器人上,相對位置是不會變化的,此時使用的連接方式就是Fixed。
Floating是浮動關(guān)節(jié),第六種planar是平面關(guān)節(jié),這兩種使用相對較少。
在URDF模型中,每一個link都使用這樣一段xml內(nèi)容描述,比如關(guān)節(jié)的名字叫什么,運動類型是哪一種。

parent標(biāo)簽:描述父連桿;
child標(biāo)簽:描述子連桿,子連桿會相對父連桿發(fā)生運動;
origin:表示兩個連桿坐標(biāo)系之間的關(guān)系,也就是圖中紅色的向量,可以理解為這兩個連桿該如何安裝到一起;
axis表示關(guān)節(jié)運動軸的單位向量,比如z等于1,就表示這個旋轉(zhuǎn)運動是圍繞z軸的正方向進(jìn)行的;
limit就表示運動的一些限制了,比如最小位置,最大位置,和最大速度等。
Info
ROS中關(guān)于平移的默認(rèn)單位是m,旋轉(zhuǎn)是弧度(不是度),所以這里的3.14就表示可以在-180度到180度之間運動,線速度是m/s,角速度是rad/s。
-
機器人
+關(guān)注
關(guān)注
213文章
29463瀏覽量
211476 -
運動控制
+關(guān)注
關(guān)注
4文章
635瀏覽量
33357 -
模型
+關(guān)注
關(guān)注
1文章
3483瀏覽量
49962 -
機器臂
+關(guān)注
關(guān)注
0文章
18瀏覽量
6389
發(fā)布評論請先 登錄
工業(yè)機器人的基本結(jié)構(gòu)
機器人的關(guān)節(jié)結(jié)構(gòu)是怎樣設(shè)計的?
關(guān)節(jié)機器人控制
人形機器人的關(guān)節(jié)技術(shù)能不能使用球形關(guān)節(jié)?
機器人的主要技術(shù)參數(shù)
工業(yè)機器人的工作原理
工業(yè)機器人的末端關(guān)節(jié)旋轉(zhuǎn)該精確控制?
微型機器人關(guān)節(jié)使用超聲波電機的優(yōu)勢
機器人關(guān)節(jié)用什么電機?
機器人關(guān)節(jié)用什么電機
直角坐標(biāo)機器人&關(guān)節(jié)機器人的區(qū)別詳解
直角坐標(biāo)機器人&amp;關(guān)節(jié)機器人的區(qū)別詳解

劍指人形機器人賽道,泰科機器人推出重磅關(guān)節(jié)模組

常見的多關(guān)節(jié)機器人有哪些?具有什么特點?






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論