 開疆智能EtherCAT轉CANopen網關連接IS620P伺服配置案例
開疆智能EtherCAT轉CANopen網關連接IS620P伺服配置案例

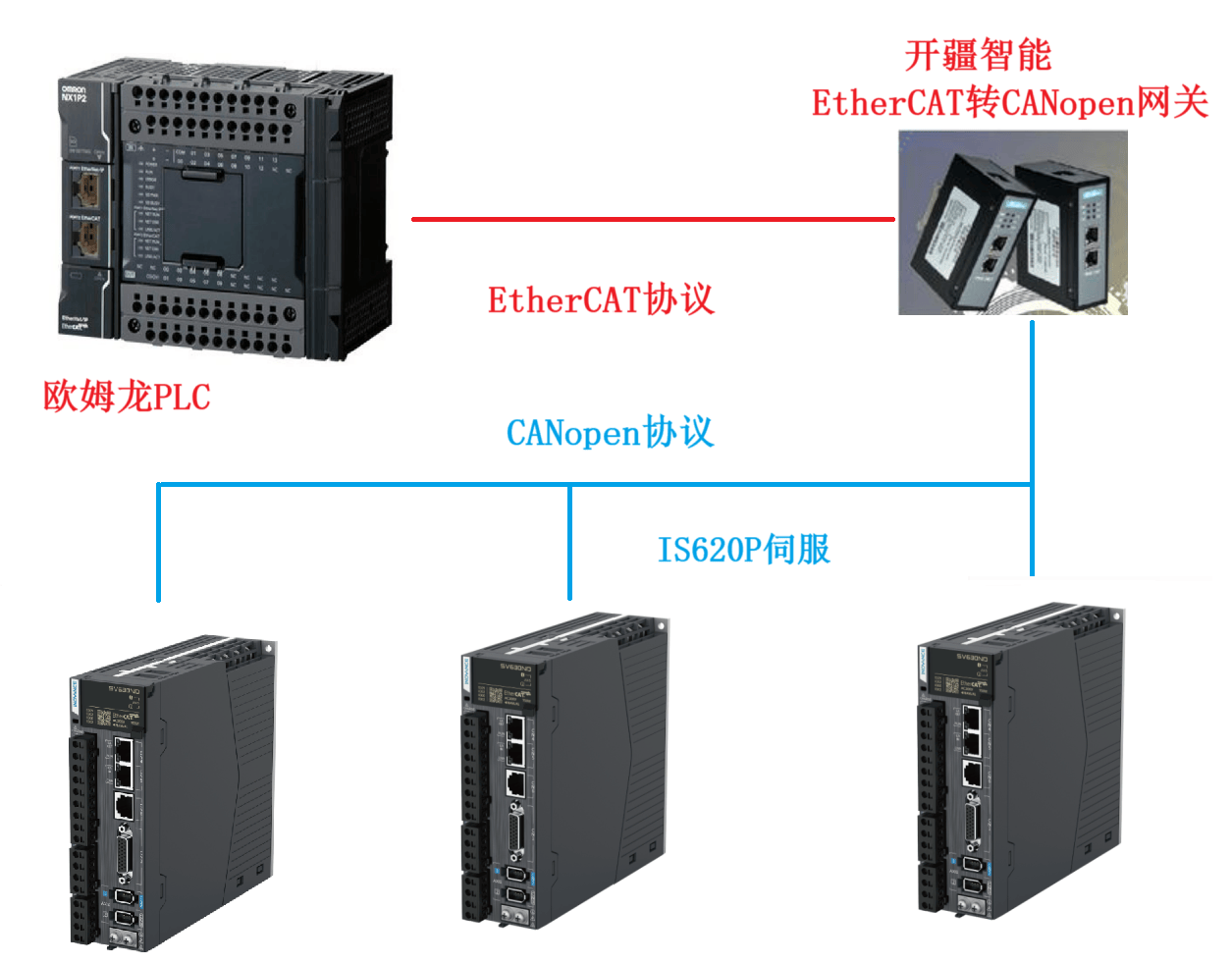
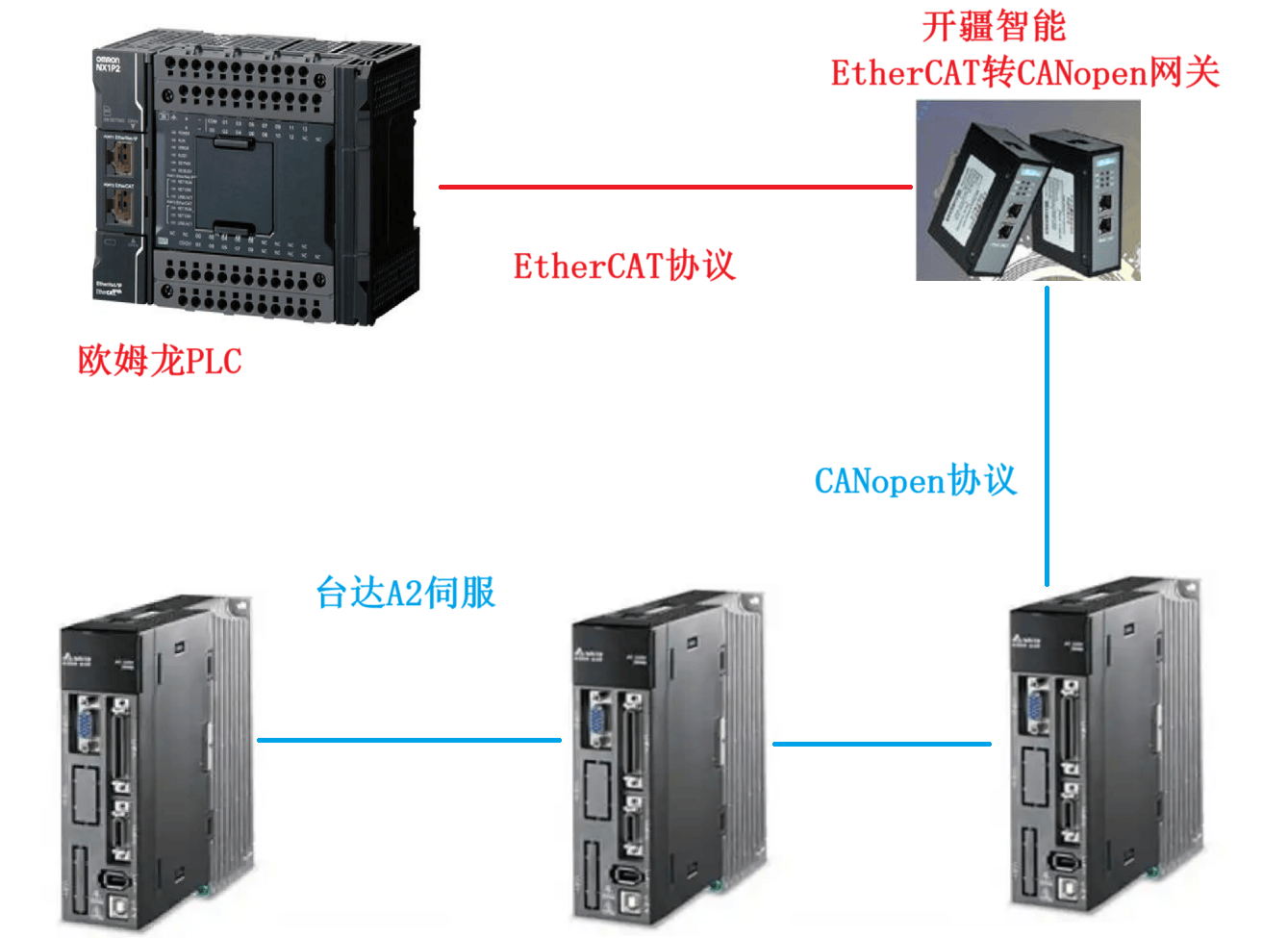
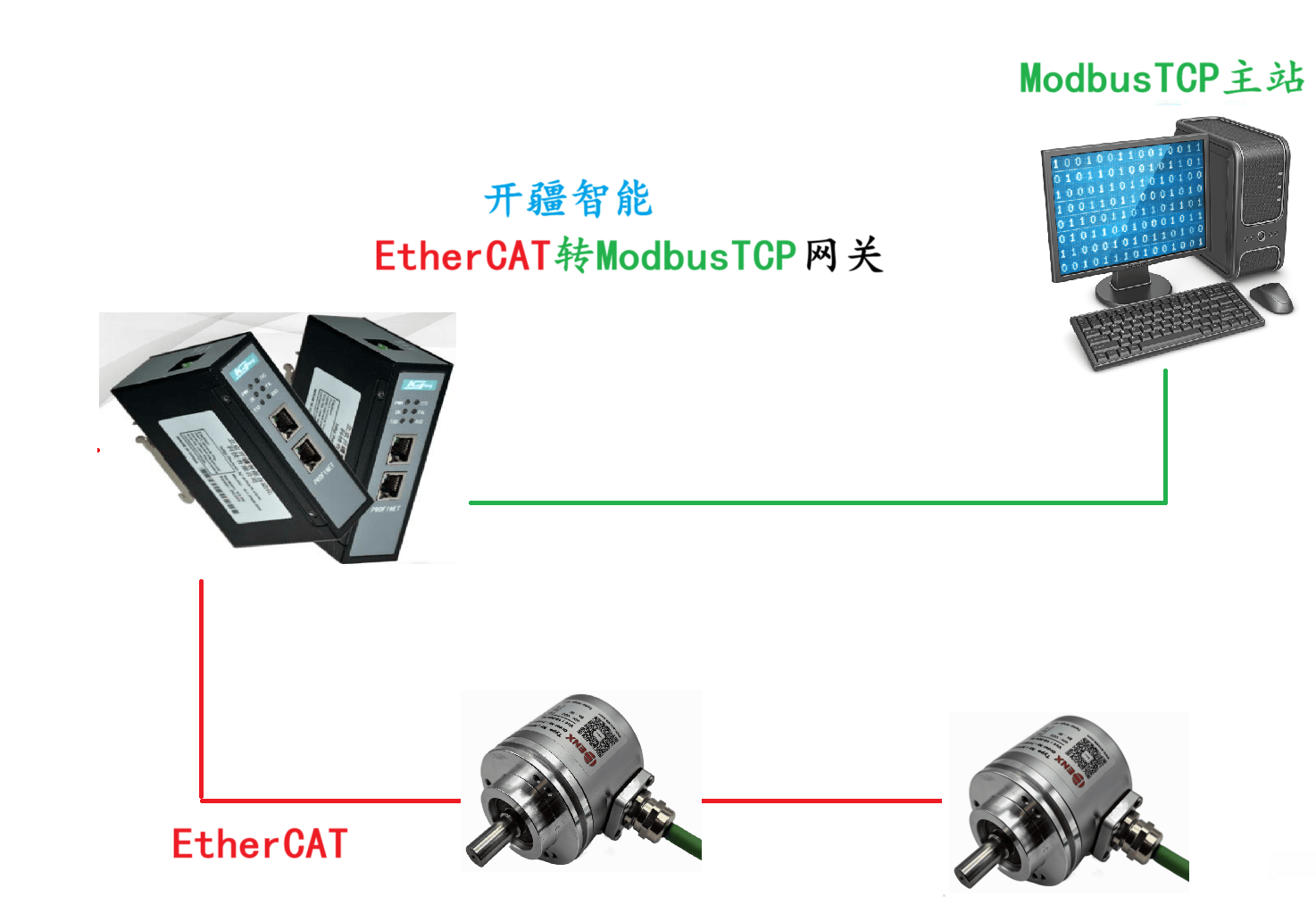
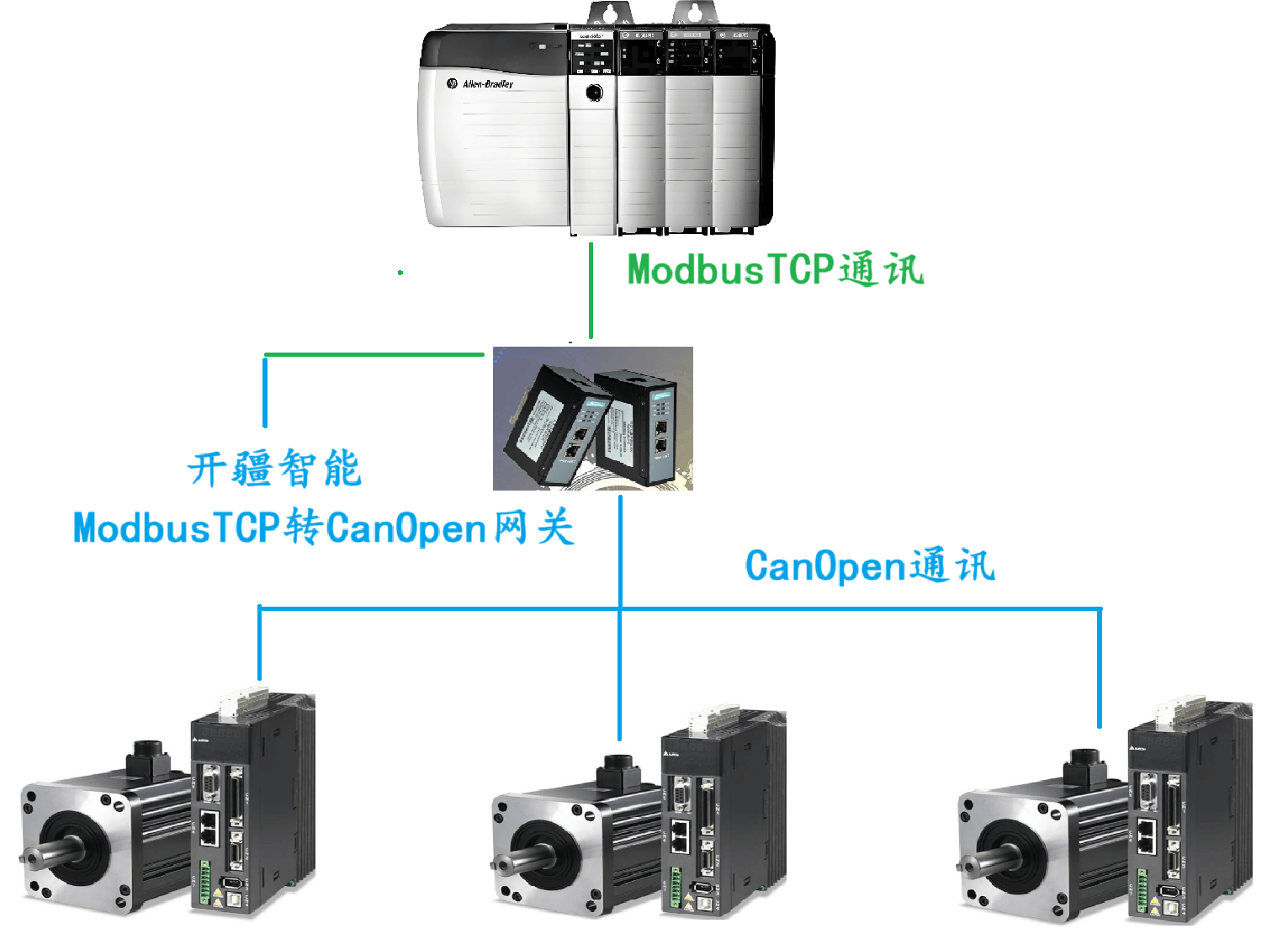
本案例是國內某紡織廠使用歐姆龍PLC通過EtherCAT轉CANopen連接匯川IS620P伺服驅動器的配置案例。
具體步驟如下。
配置步驟:
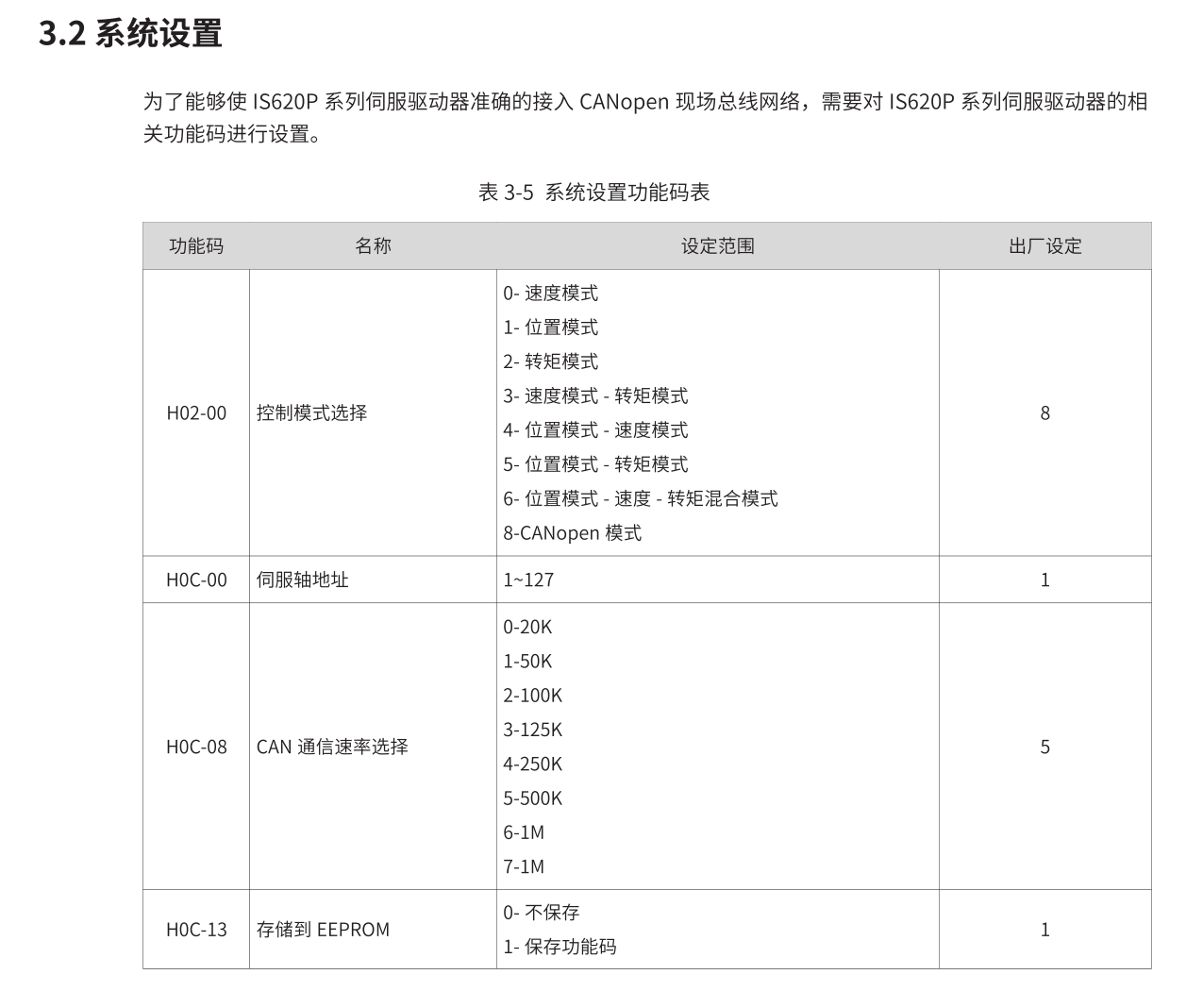
首先配置伺服從站設定從站地址,波特率以及其他相關參數。
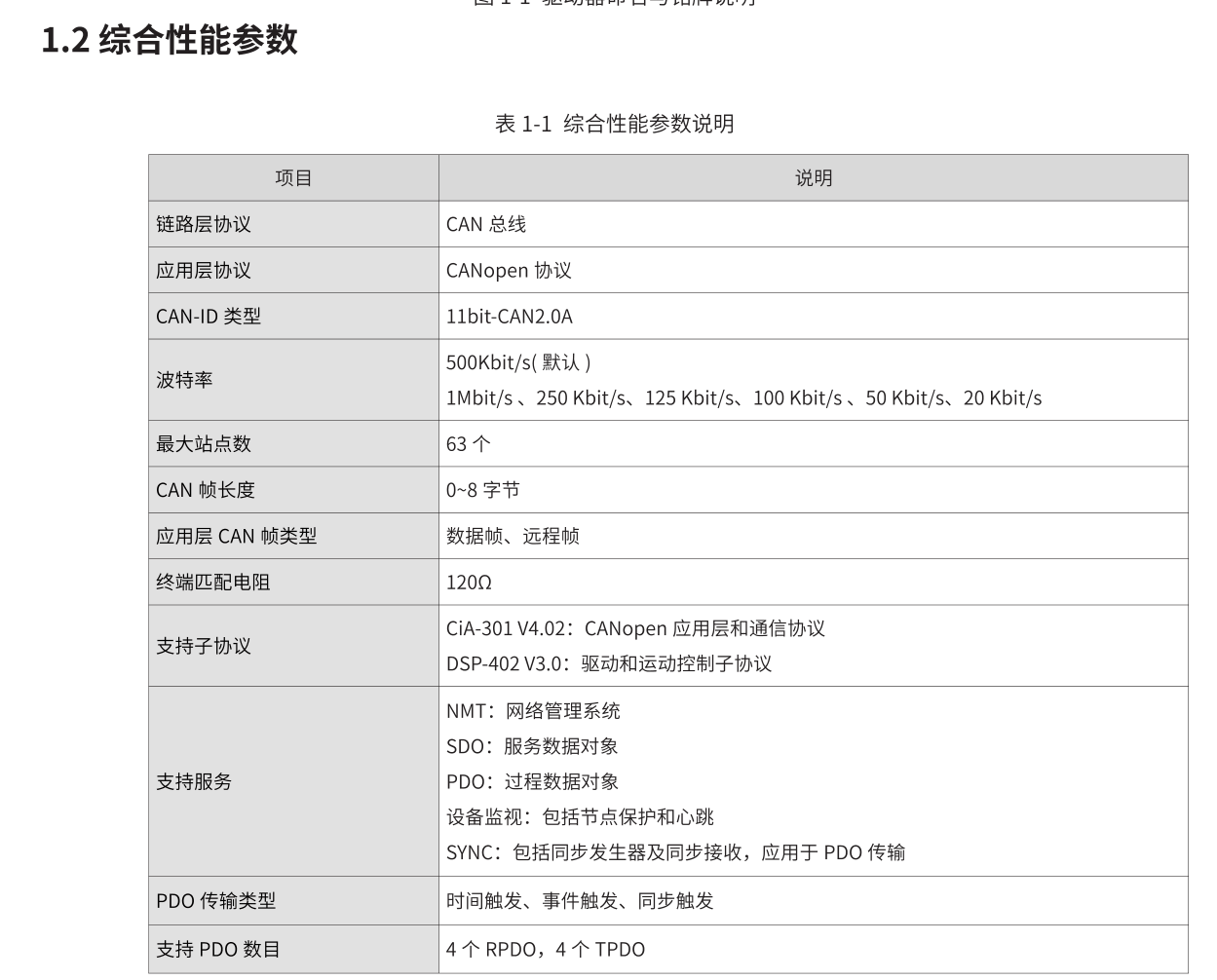
從手冊得知波特率支持20k-1M支持4個RTPDO
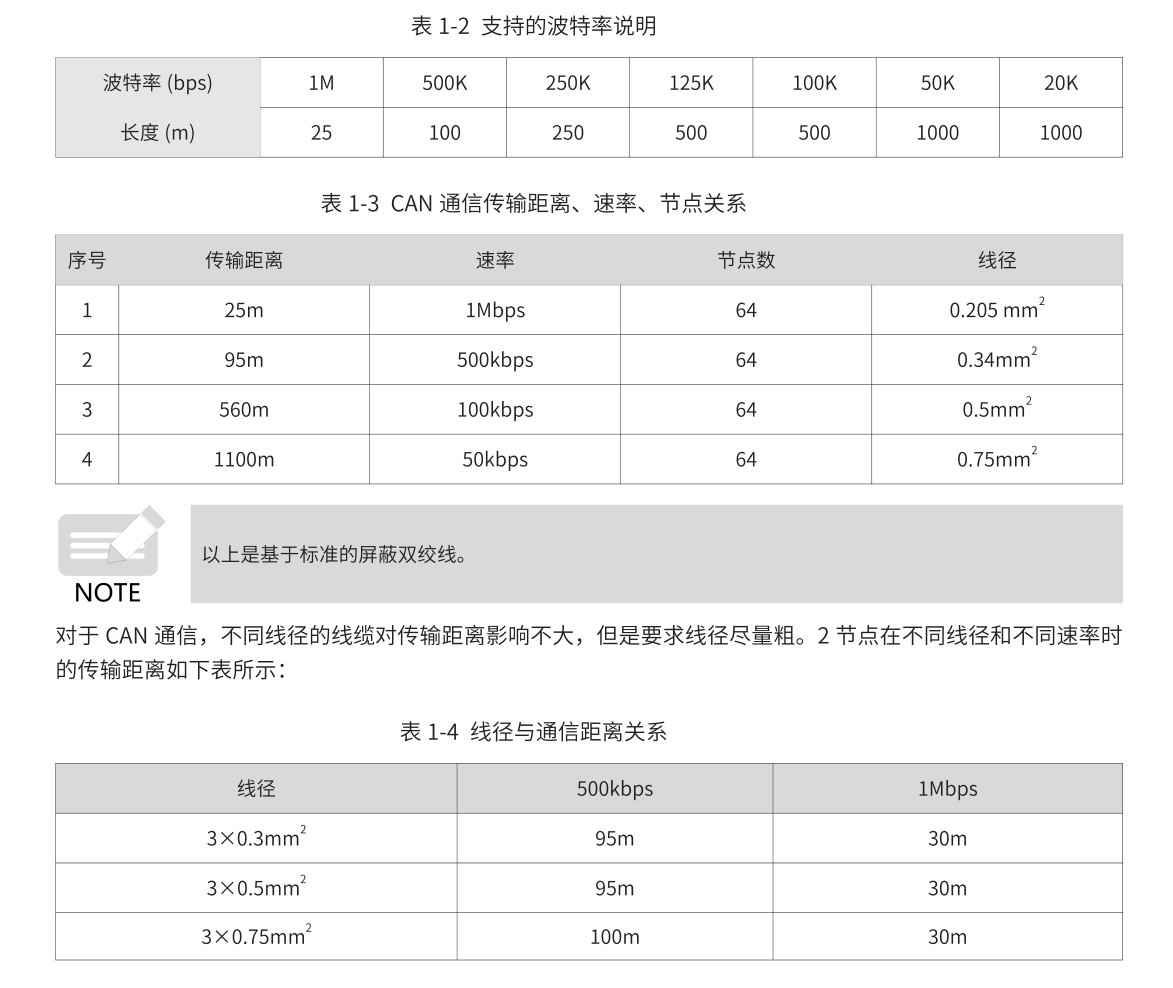
根據實際通訊距離設置實際波特率
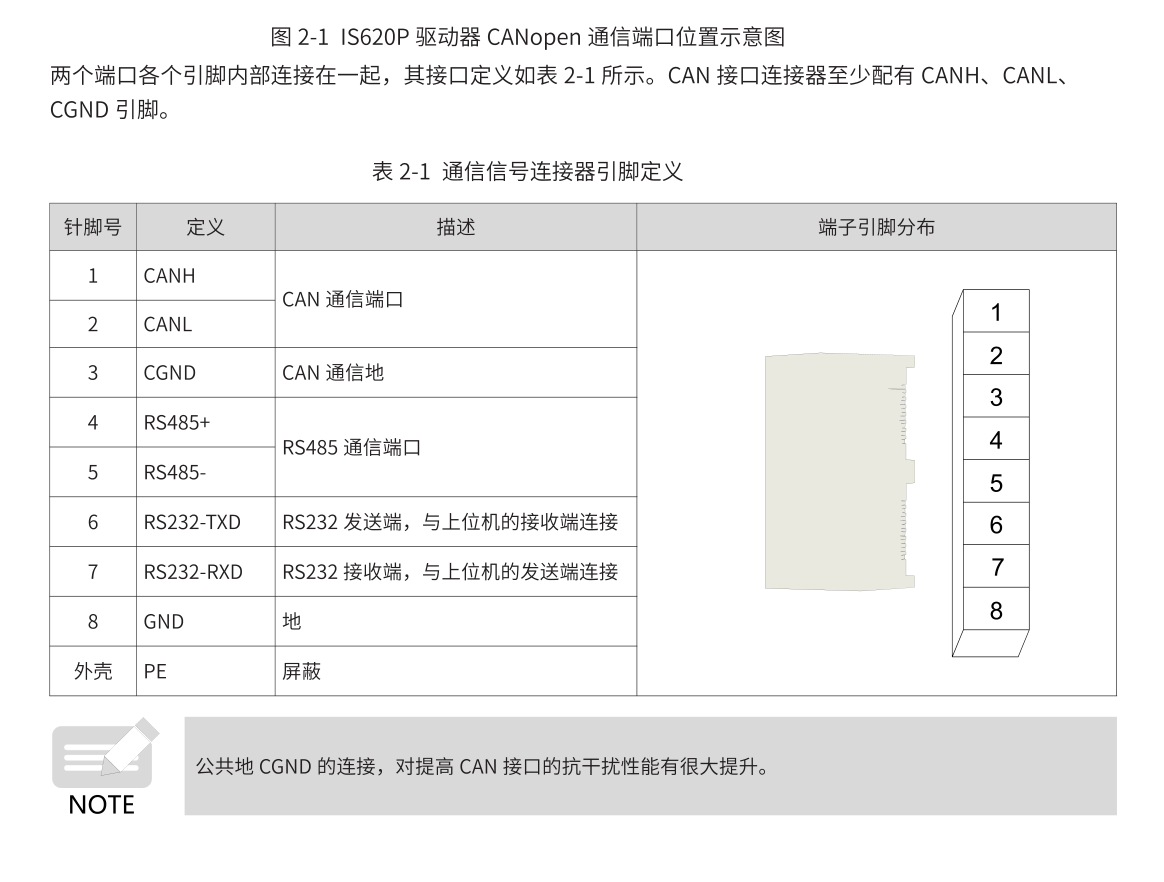
根據從站接線要求接好CAN總線。
面板設置控制模式為8CANopen模式,站地址為1波特率我們設為1M
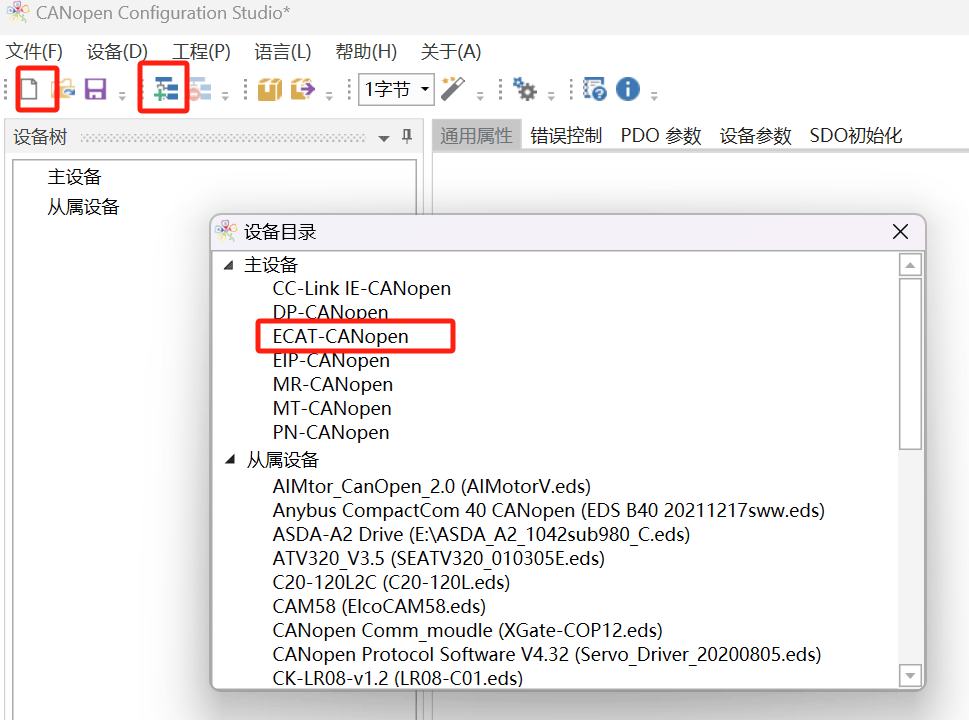
完成后保存配置并重新上電。打開網關配置軟件“CANopen Configuration Studio”
網關配置
下一步進行網關的配置。打開網關配置軟件“CANopen Configuration Studio”新建項目選擇“ECAT-CANopen”
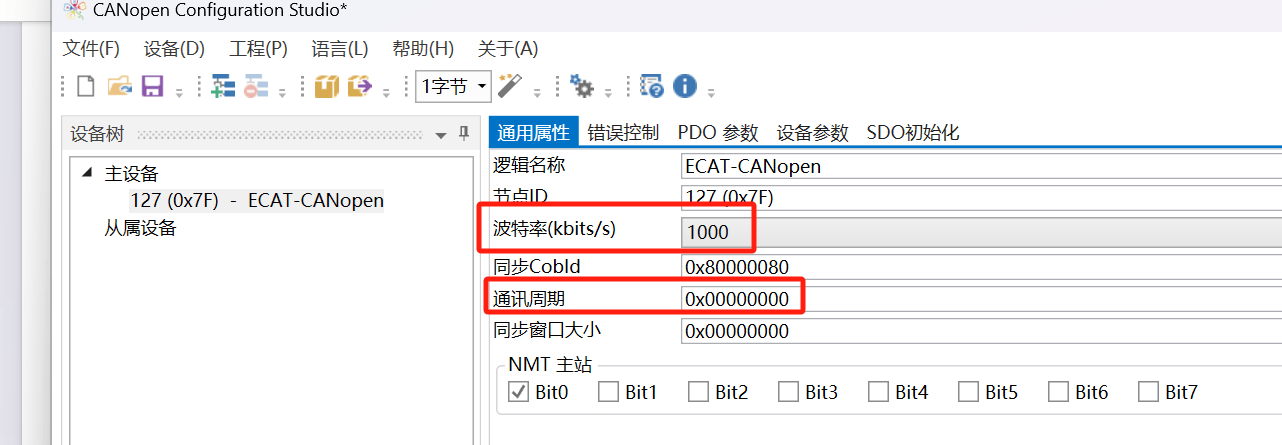
設置網關CANopen一側的波特率以及通訊周期參數,如果不使用周期模式可以填0
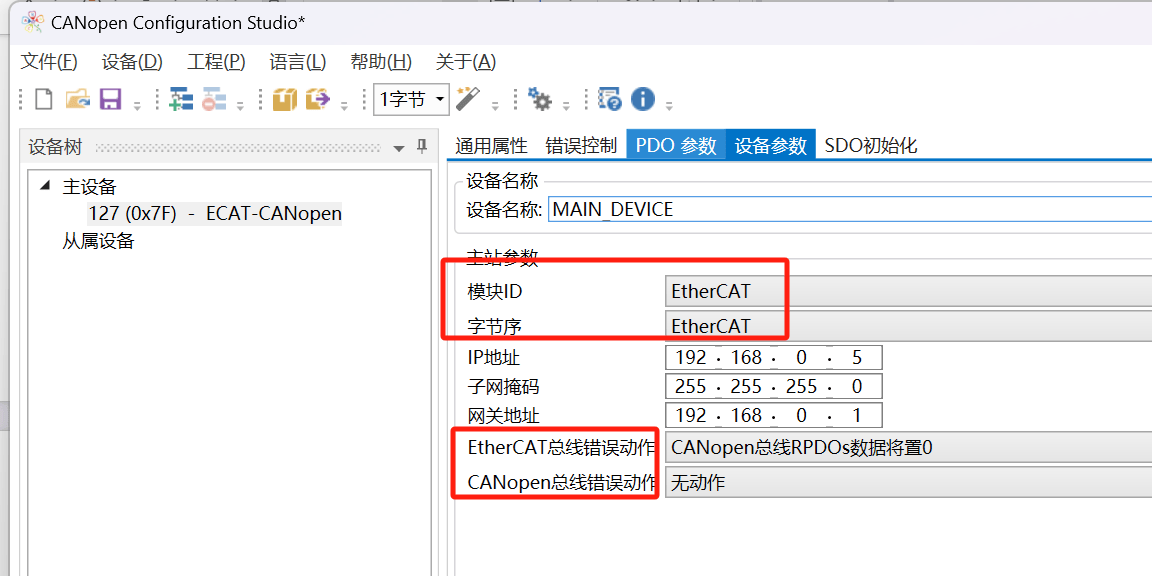
設置網關的字節順序下載IP地址以及掉線后數據處理方式。
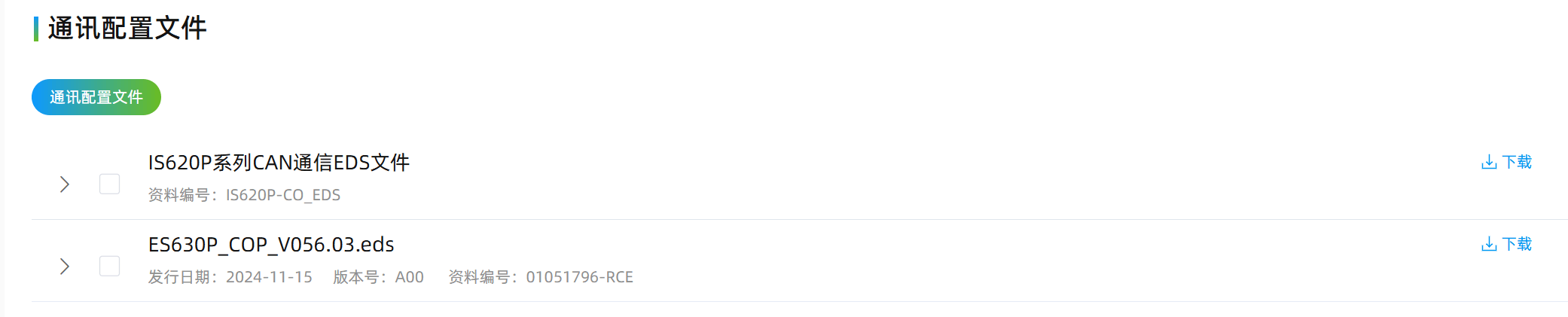
導入從站伺服EDS文件,可從伺服官網下載
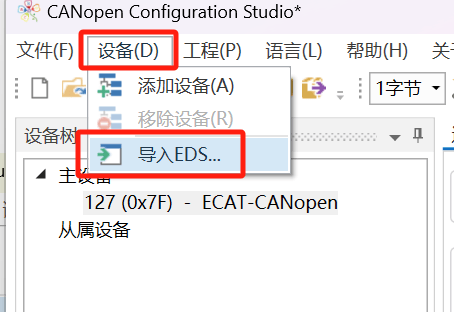
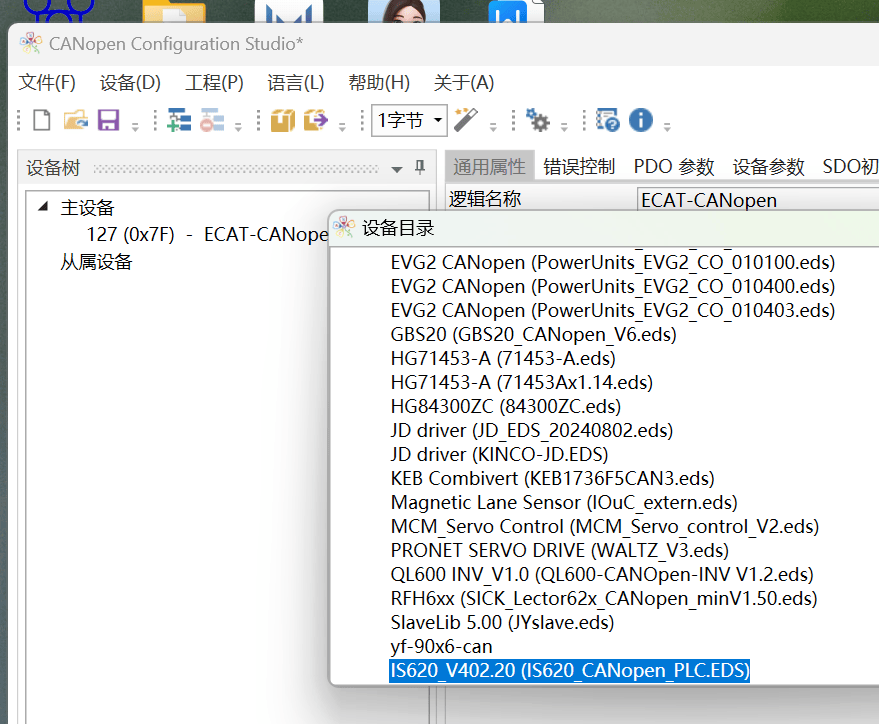
導入后將從站添加進網關組態
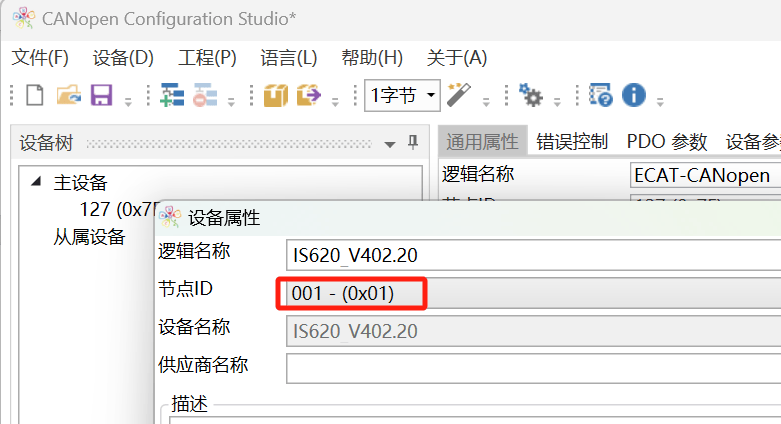
設置好從站地址
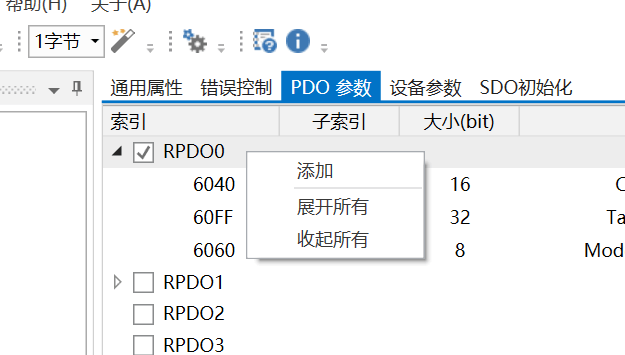
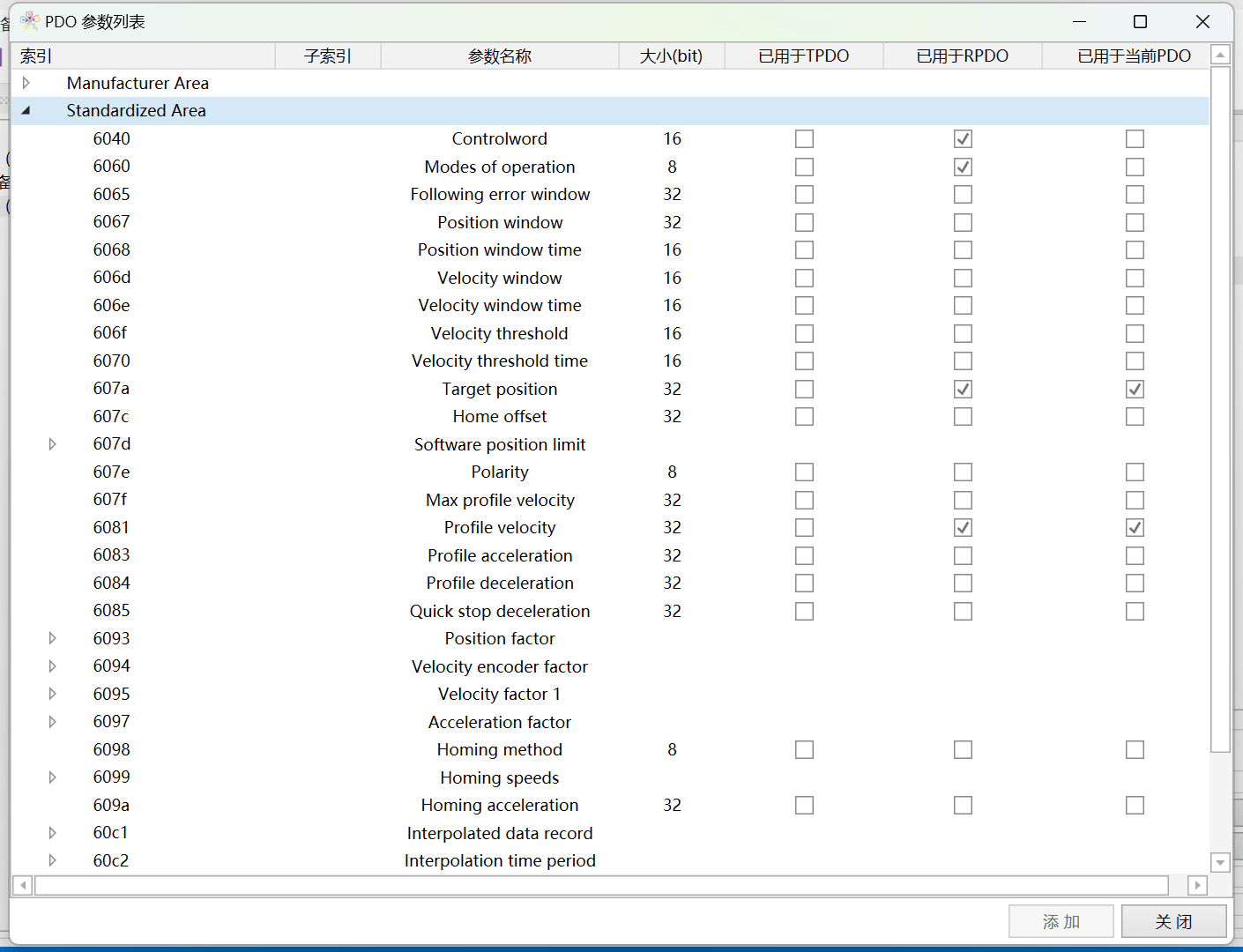
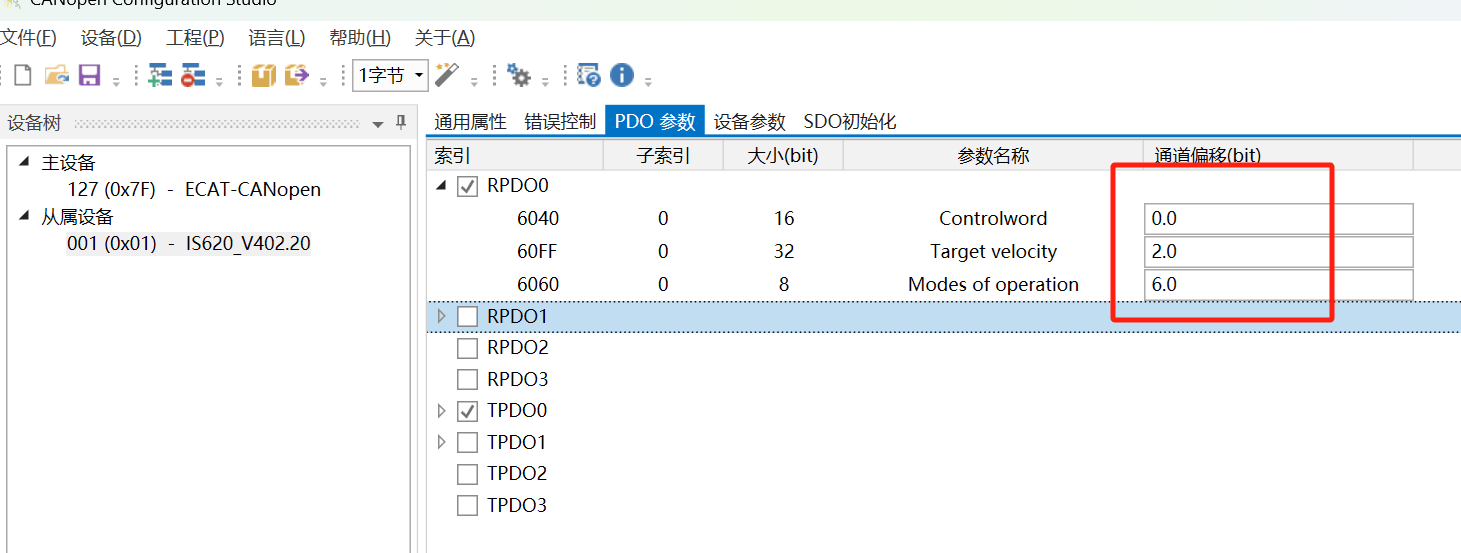
設置每個PDO用到的參數,以及PDO的通訊參數。
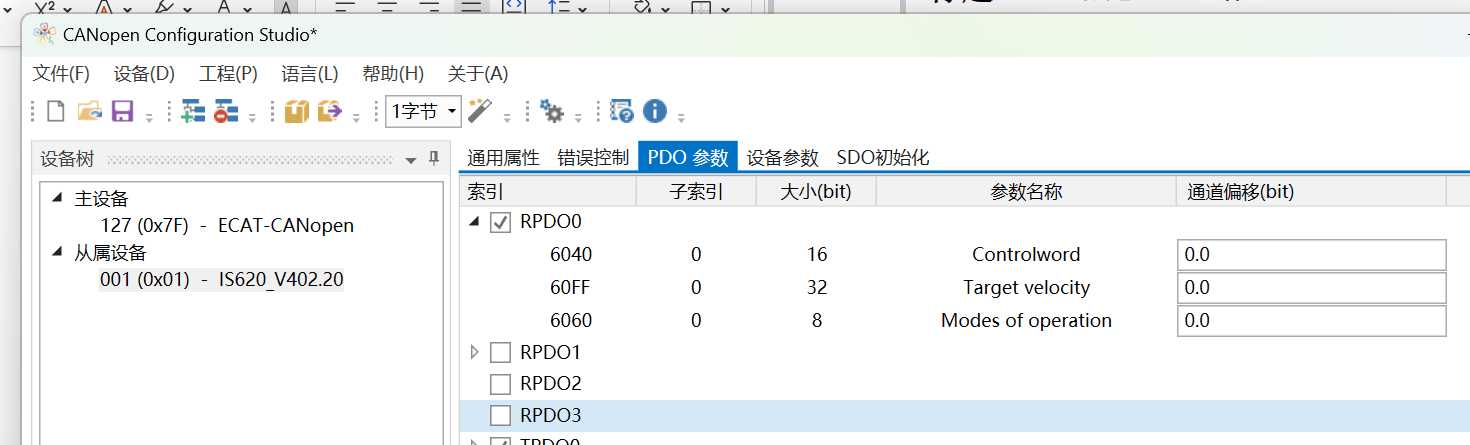
沒有的可以右鍵-添加找到所需要用到的參數即可。
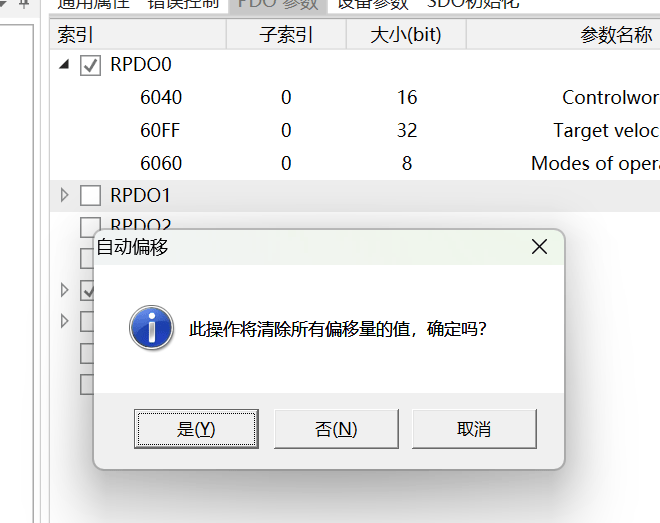
確定參數后點擊自動設置通道偏移,以便對應PLC的輸入輸出點。
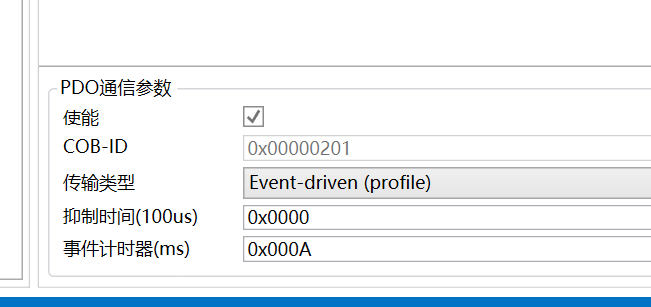
設置好PDO的通訊參數(如傳輸類型與觸發參數等)
確認無誤后將配置下載進網關,并進行PLC一側的EtherCAT設置
歐姆龍PLC配置
1. 打開歐姆龍配置軟件Sysmac Studio
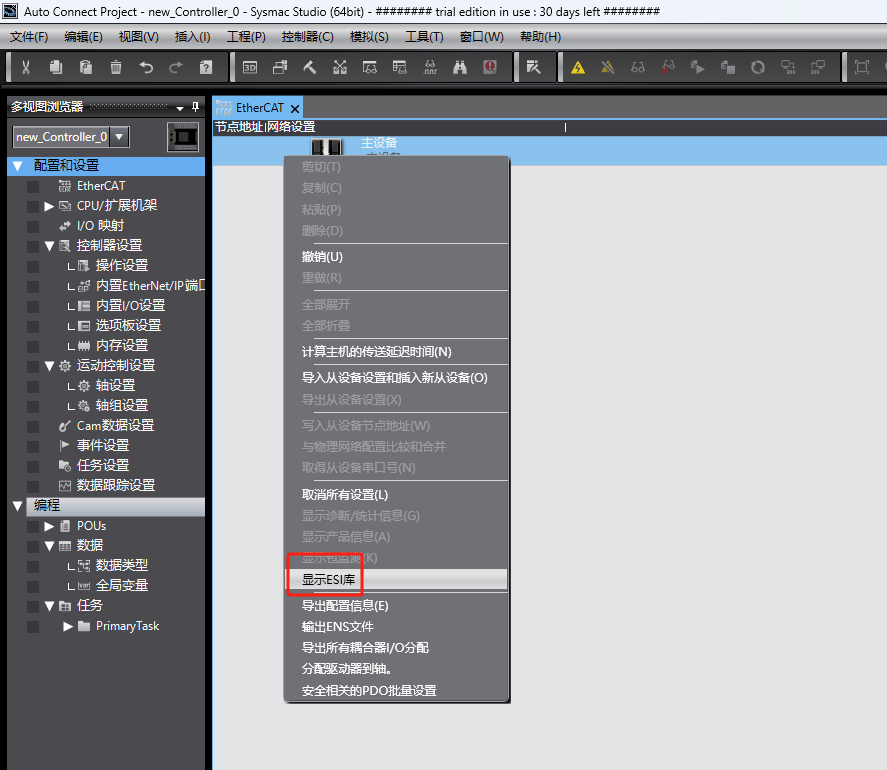
2. 雙擊EtherCAT,在主設備處右鍵選擇顯示ESI庫
3. 在彈出的對話框中選擇安裝文件
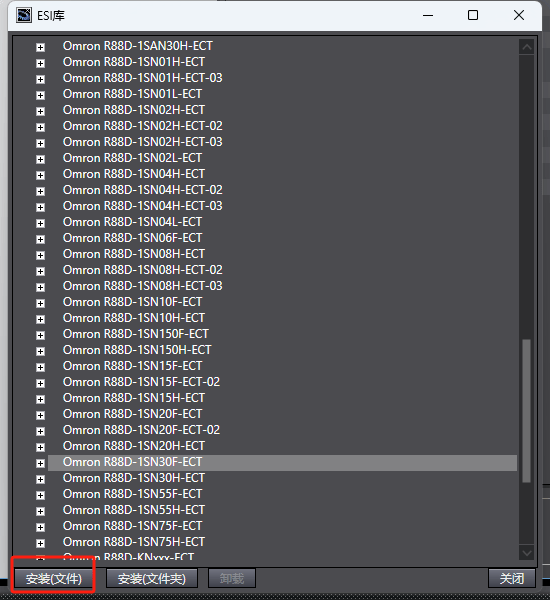
4. 選擇網關的ESI文件
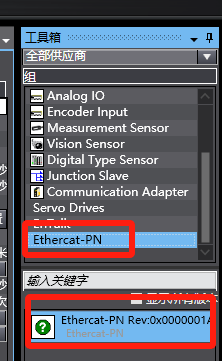
5. 添加完成后選擇Ethercat-PN
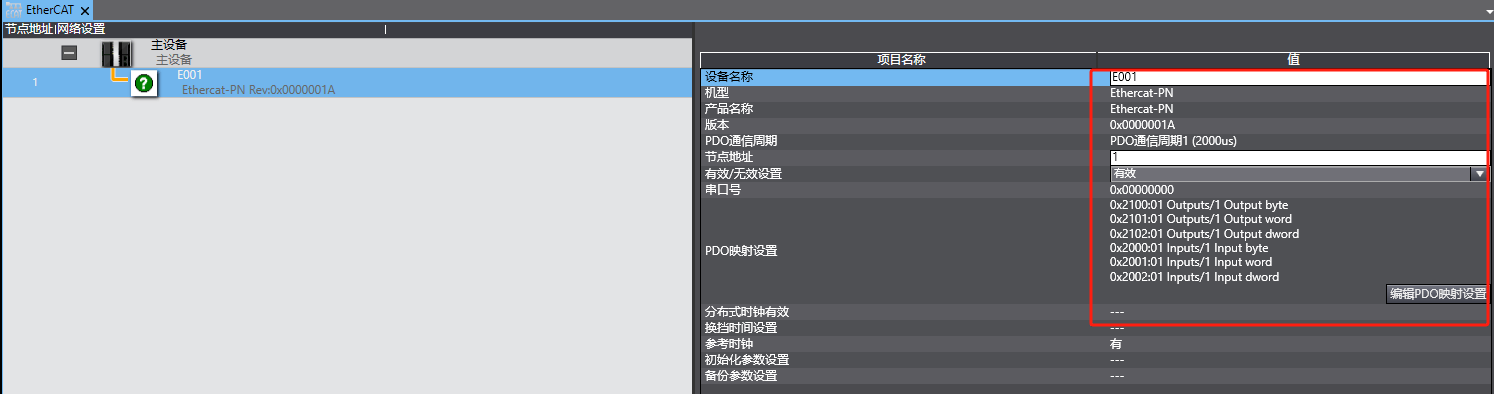
6. 1設置好網關參數
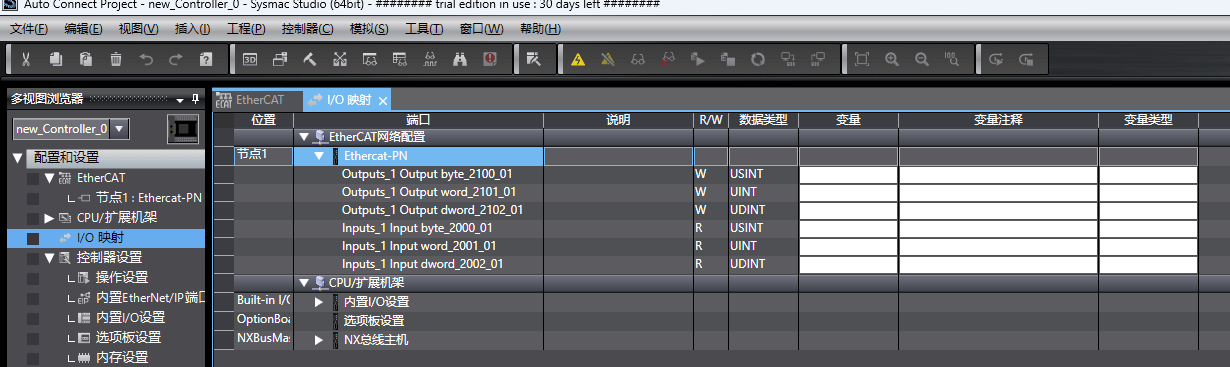
7. 打開IO映射設置好變量
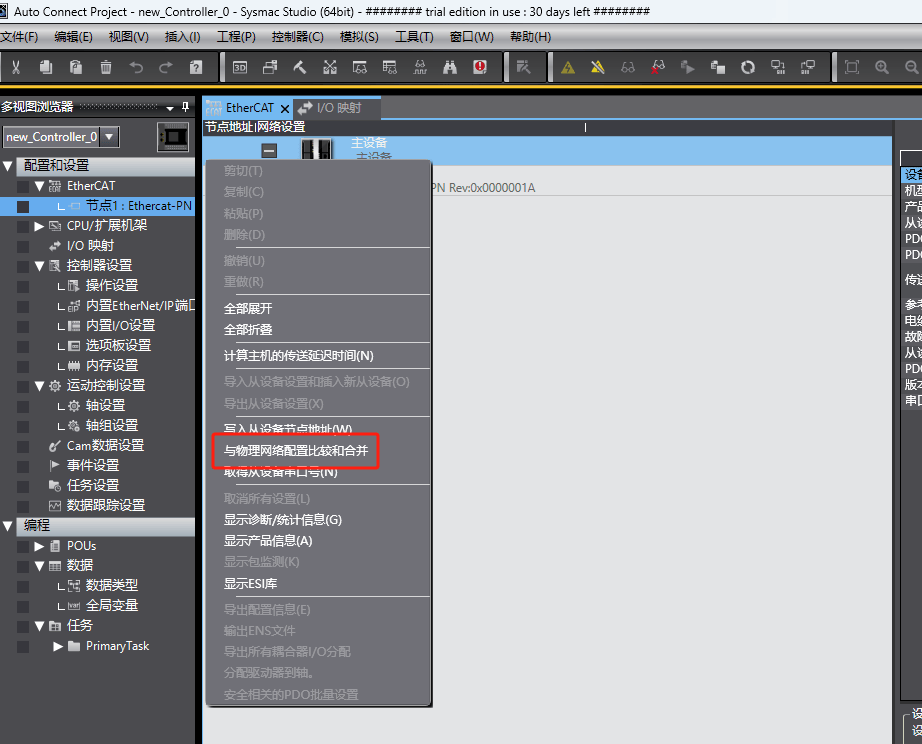
8. 將PLC在線,在主站處右鍵選擇與物理網絡配置比較和合并
9. 完成后將組態下載至PLC,將設備上電后觀察設備指示燈,等待PLC,網關與從站設備指示燈均正常后即可正常讀寫從站設備。
審核編輯 黃宇
-
CANopen
+關注
關注
8文章
402瀏覽量
44864 -
ethercat
+關注
關注
19文章
1112瀏覽量
40014
發布評論請先 登錄
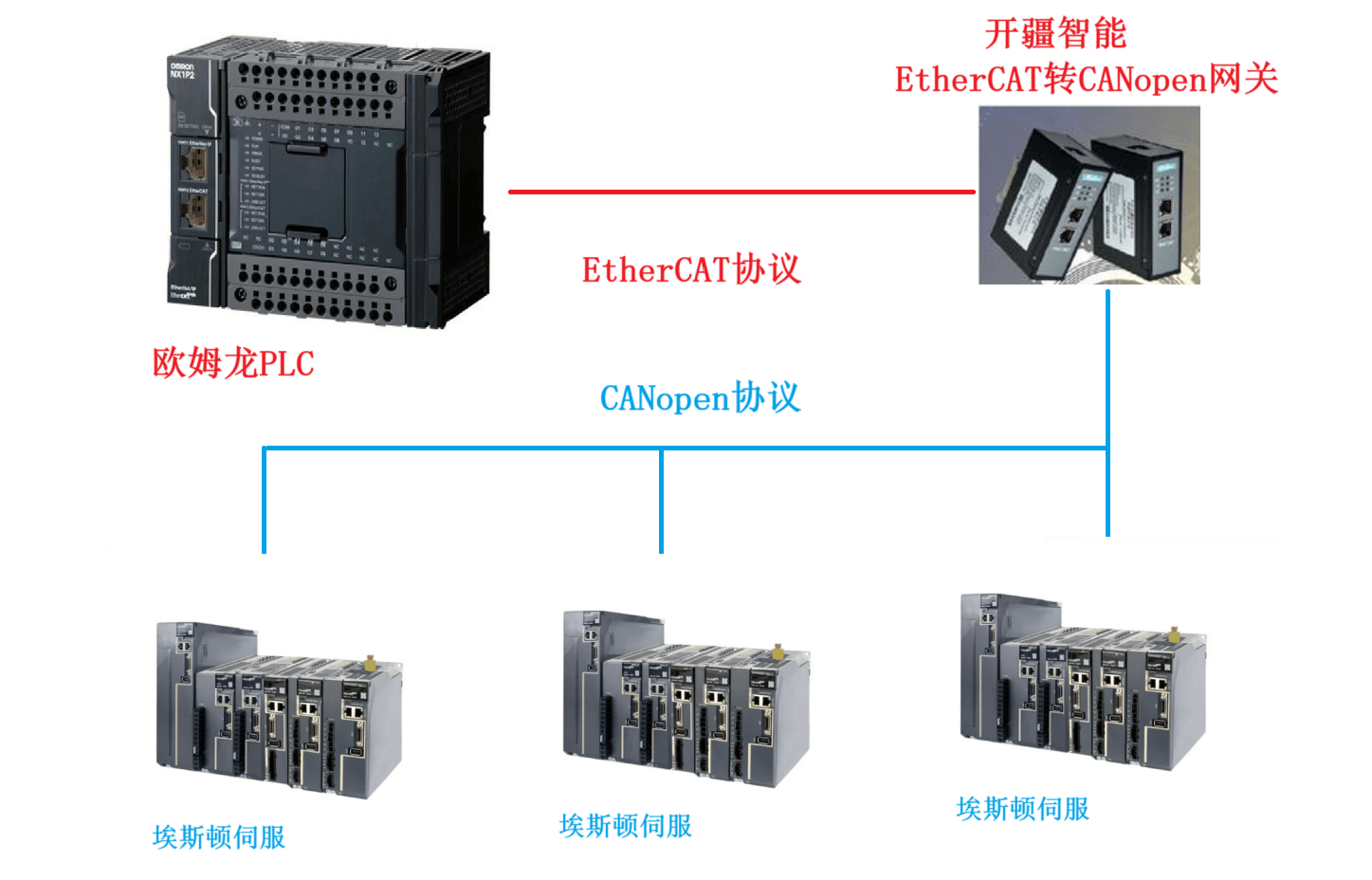
開疆智能EtherCAT轉CANopen網關連接埃斯頓伺服驅動器配置案例
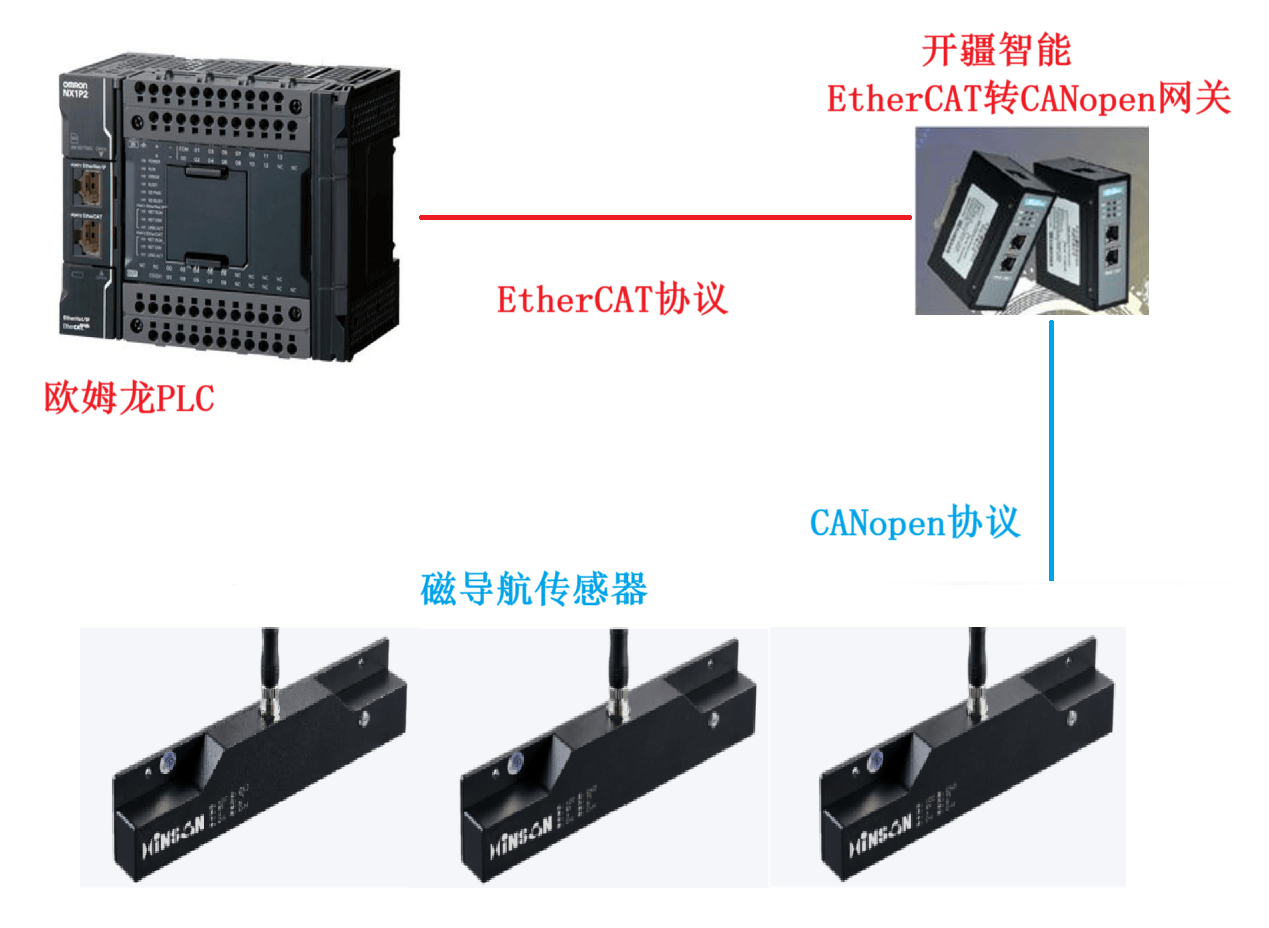
開疆智能EtherCAT轉CANopen網關連接磁導航傳感器配置案例
開疆智能EtherCAT轉CANopen網關連接臺達伺服驅動器配置案例
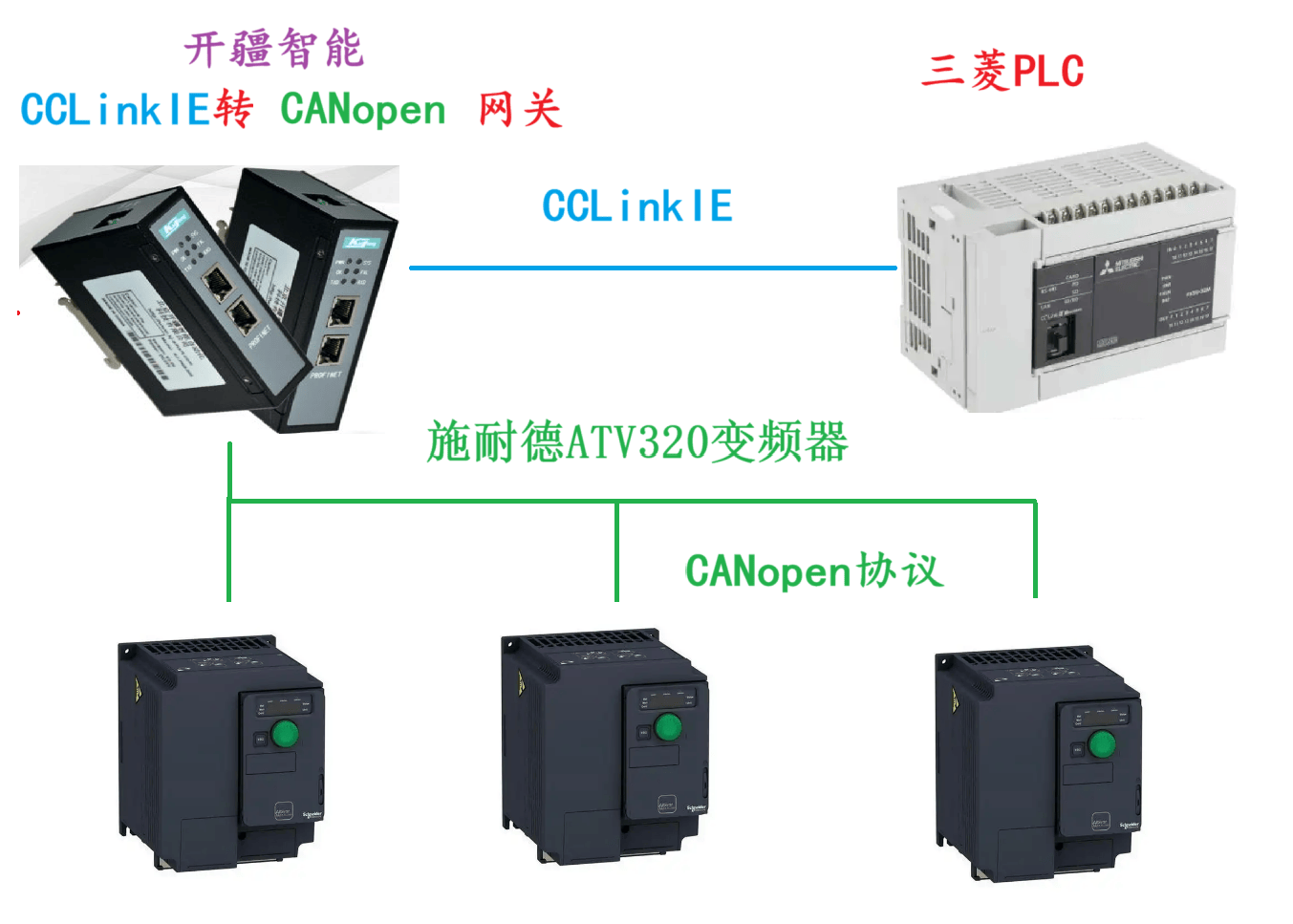
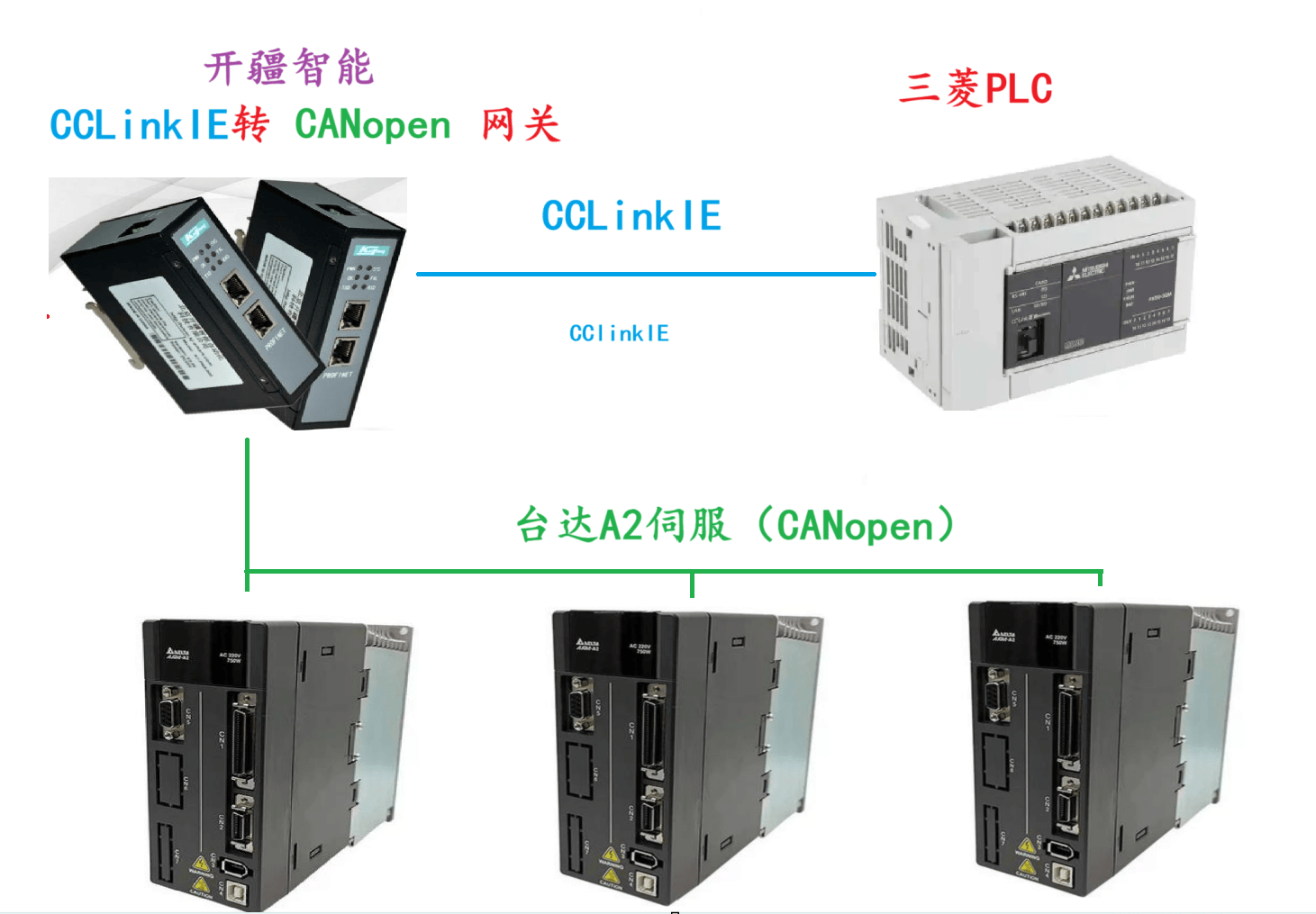
開疆智能CCLinkIE轉CANopen網關連接施耐德變頻器配置案例
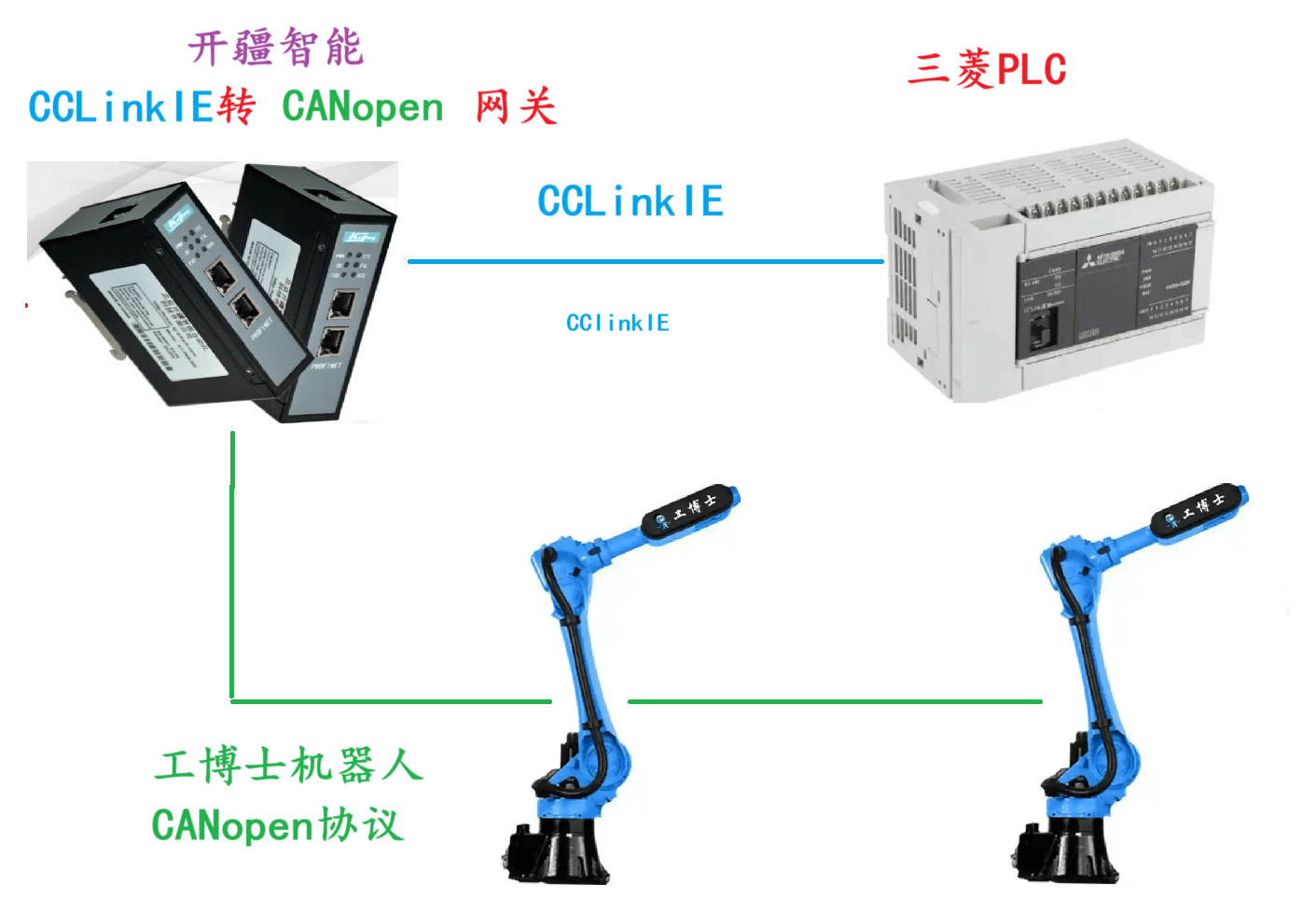
開疆智能CCLinkIE轉CANopen網關連接GBS20機器人配置案例
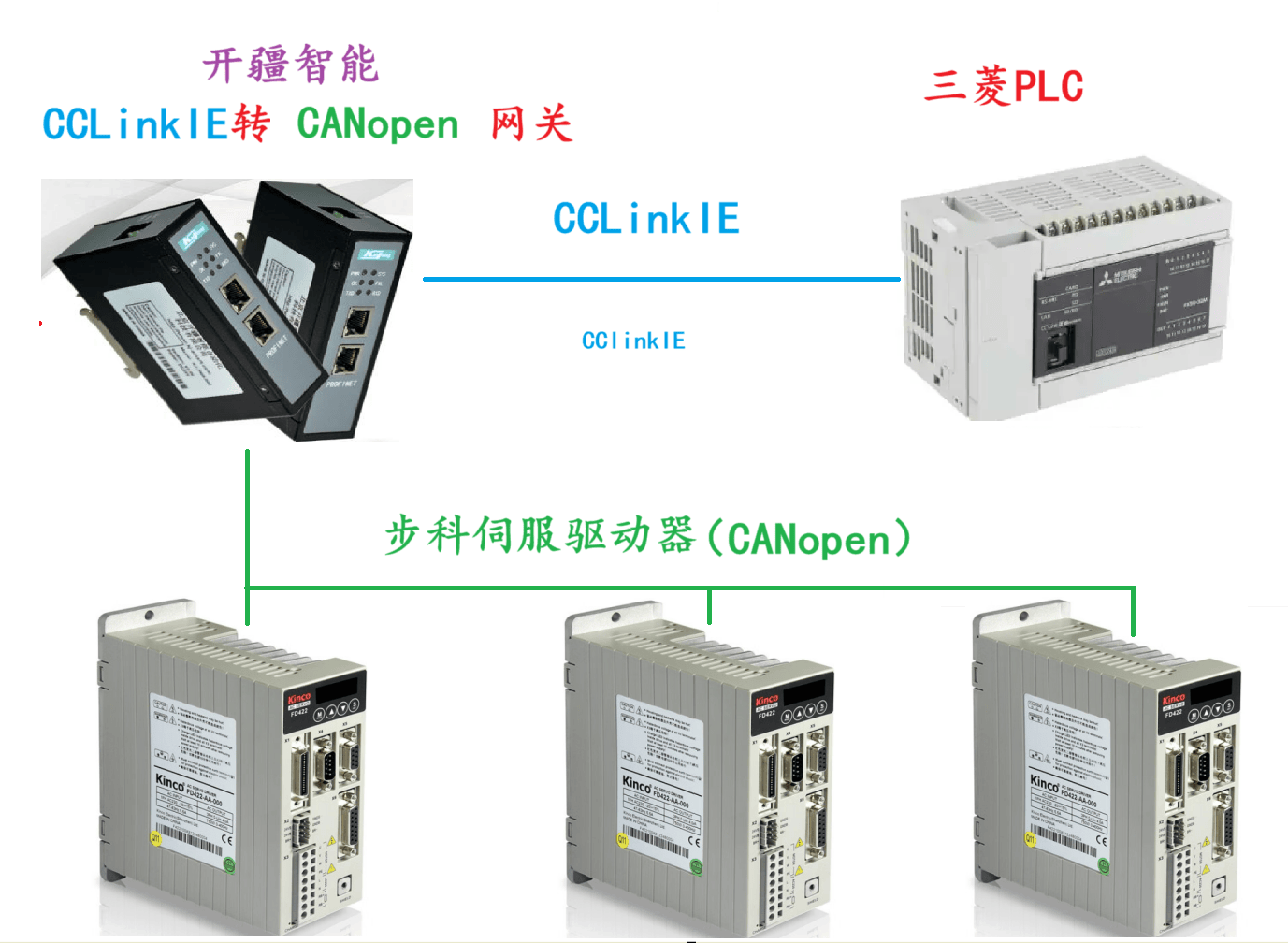
開疆智能CCLinkIE轉CANopen網關連接步科伺服驅動器配置案例
開疆智能CCLinkIE轉Canopen網關連接臺達伺服驅動器配置案例
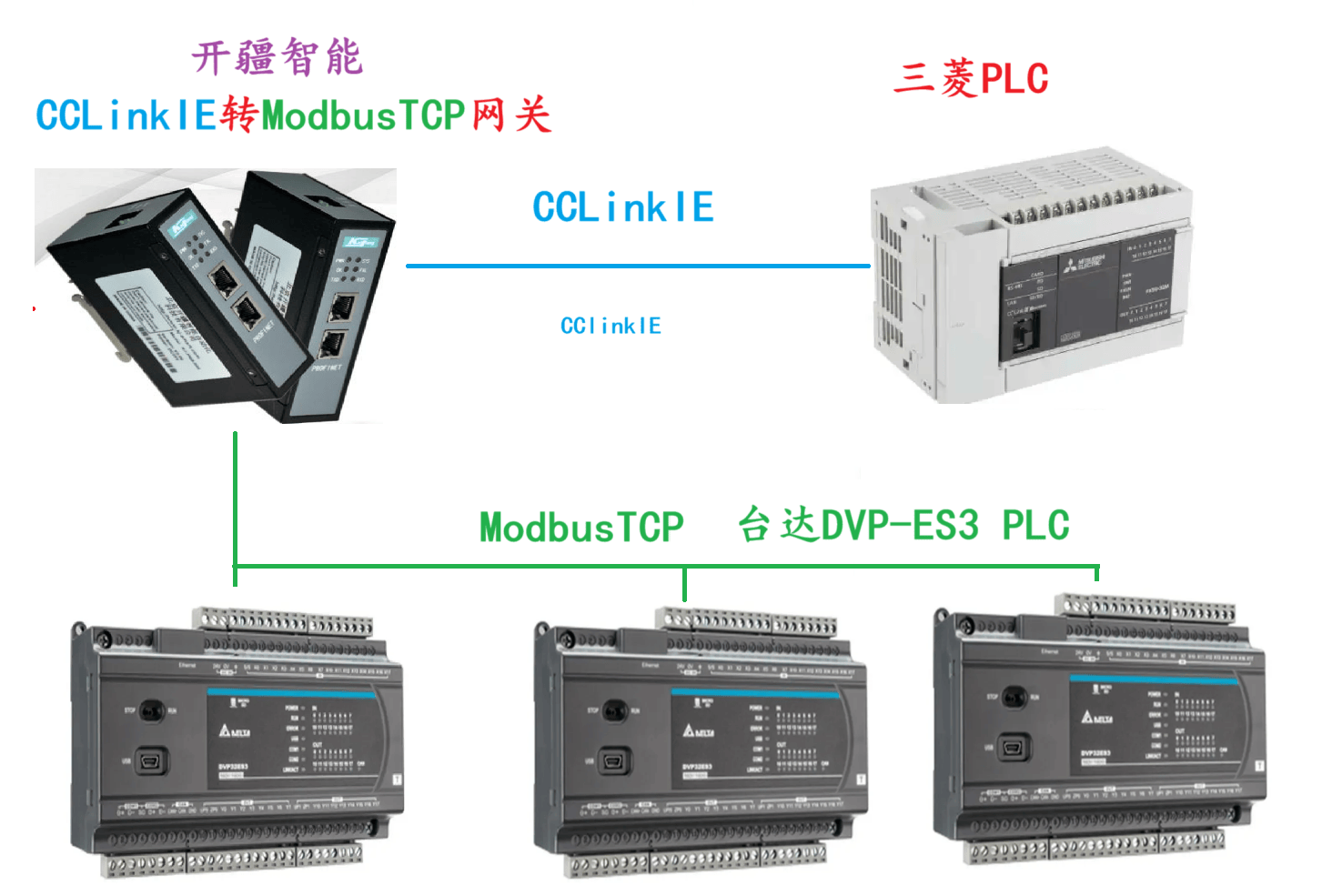
開疆智能ModbusTCP轉CClinkIE網關連接臺達DVP-ES3 PLC配置案例
開疆智能ModbusTCP轉EtherCAT網關連接IVO編碼器配置案例
開疆智能ModbusTCP轉Canopen網關連接匯川PLC配置案例
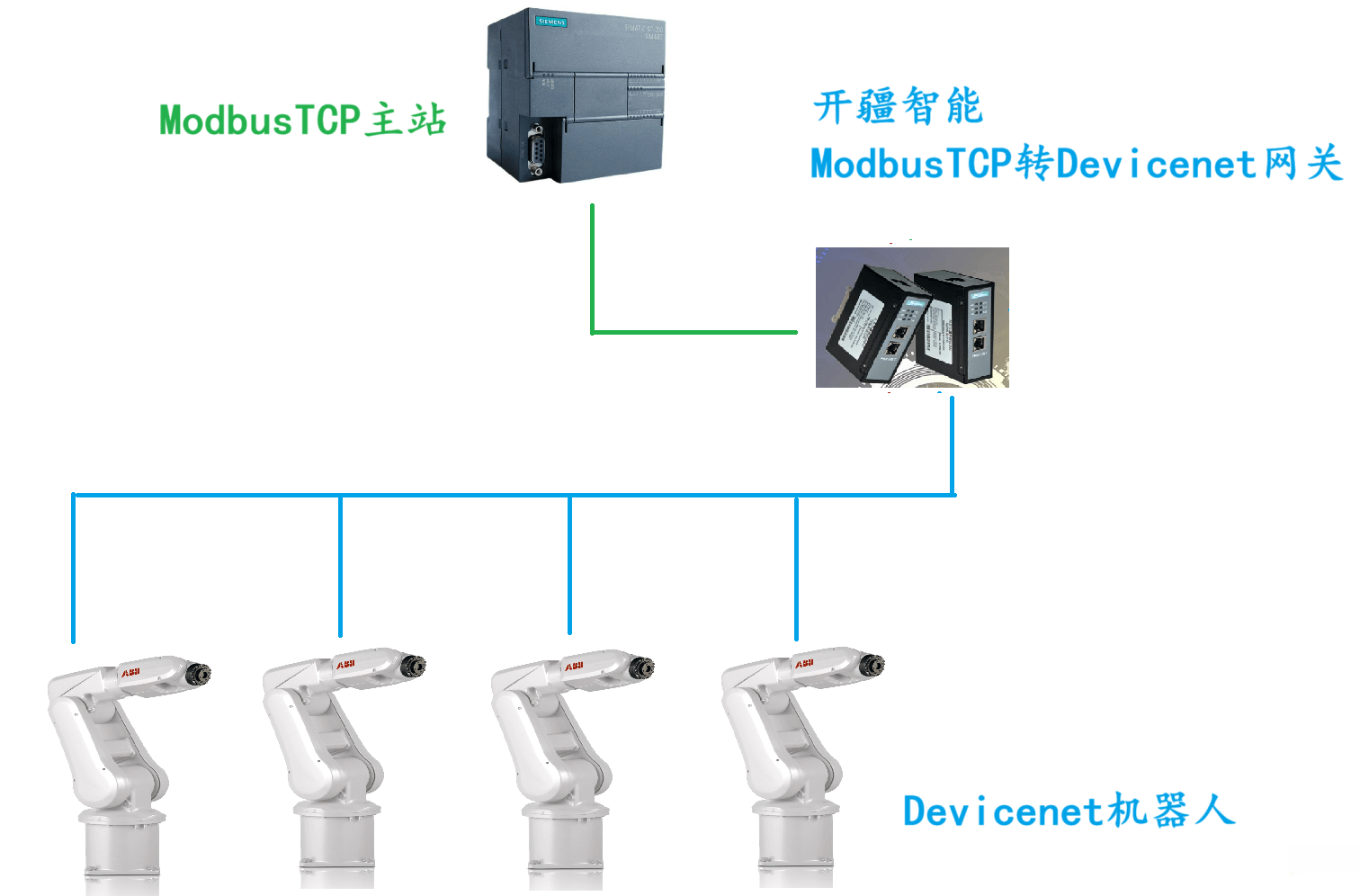
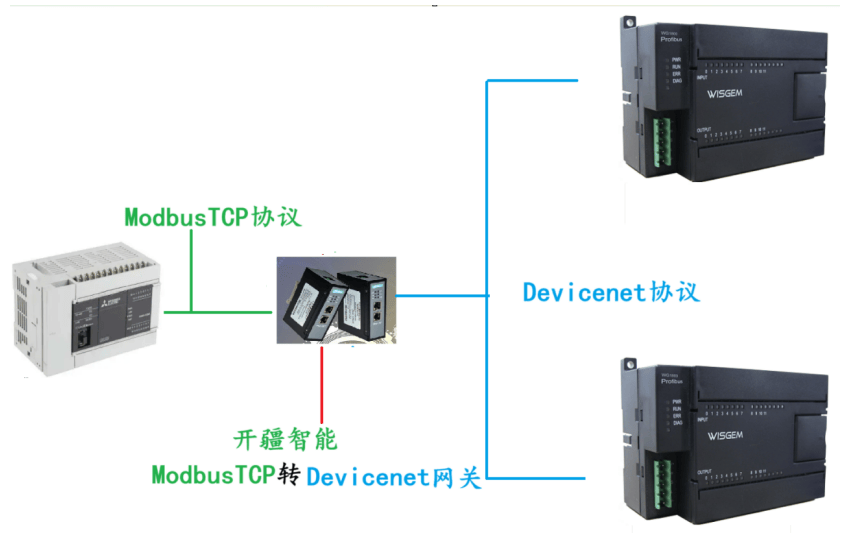
開疆智能ModbusTCP轉Canopen網關連接AB PLC與臺達伺服通訊案例
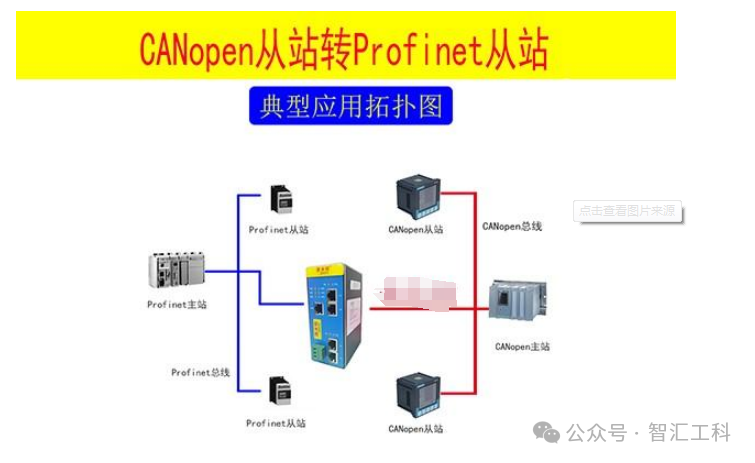
CANOpen轉PROFINET網關連接低壓伺服系統





 工商網監
工商網監
評論