 EtherCAT 轉 CANopen 網關與伺服器在配置軟件上的配置步驟
EtherCAT 轉 CANopen 網關與伺服器在配置軟件上的配置步驟

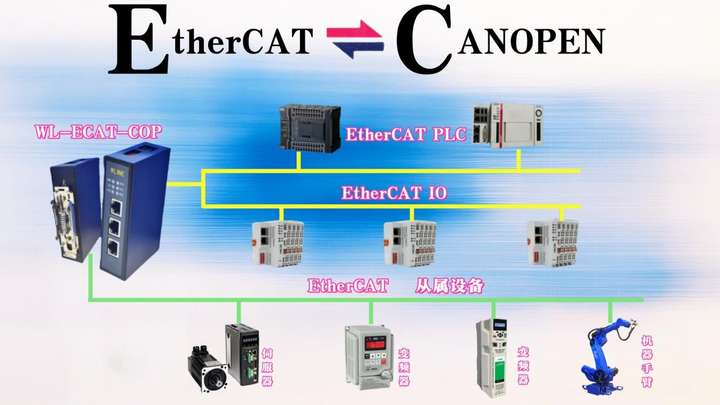
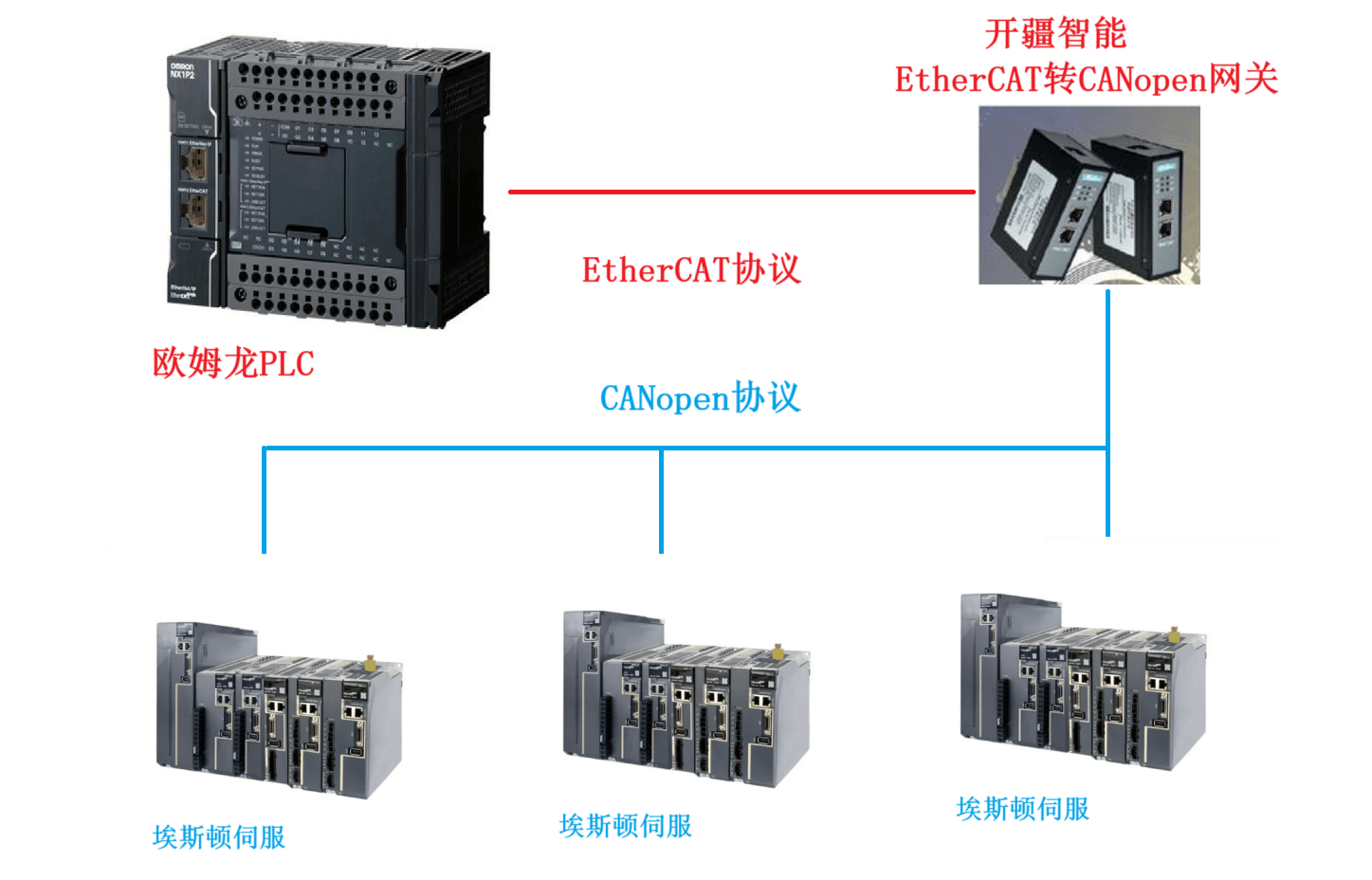
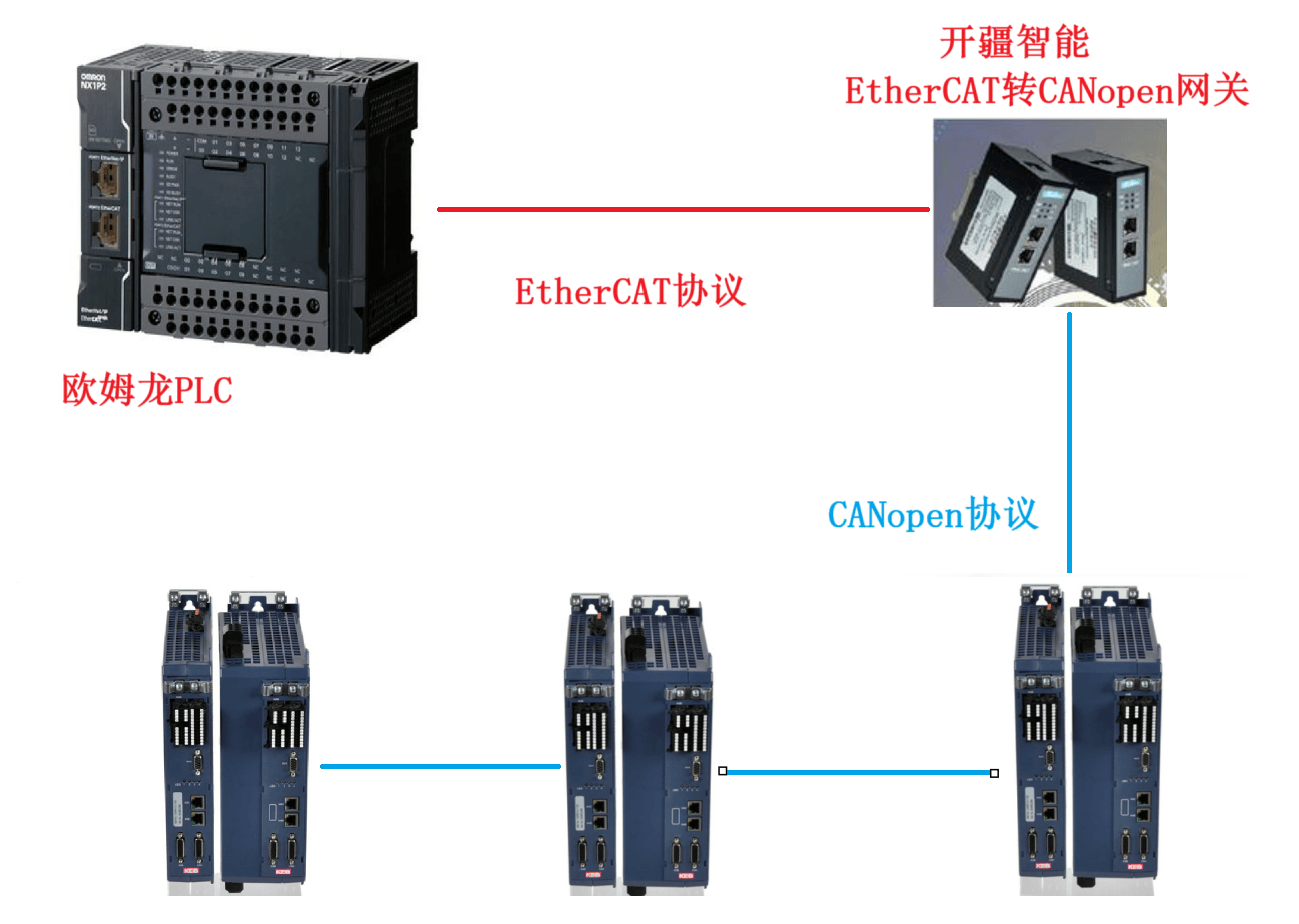
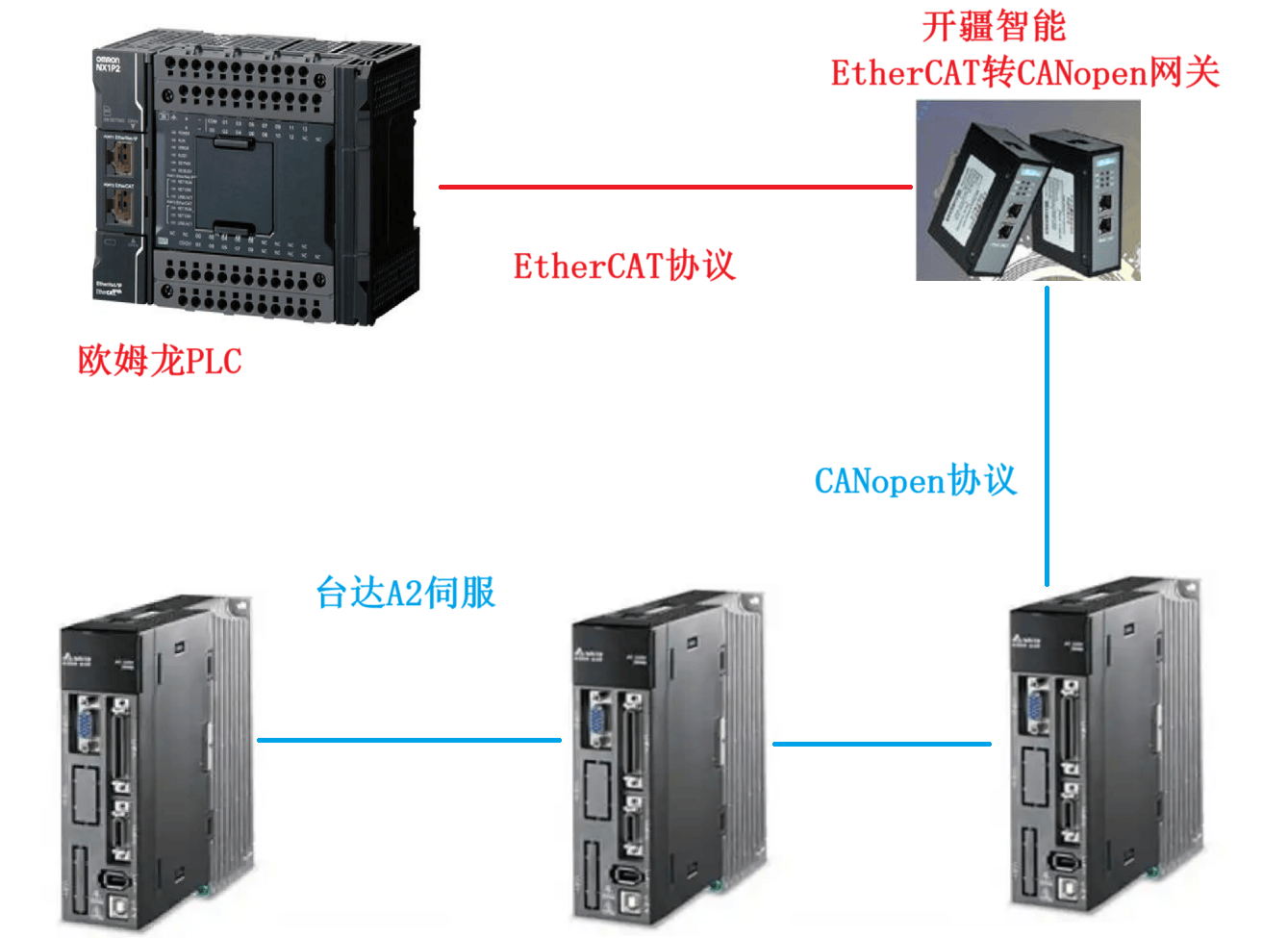
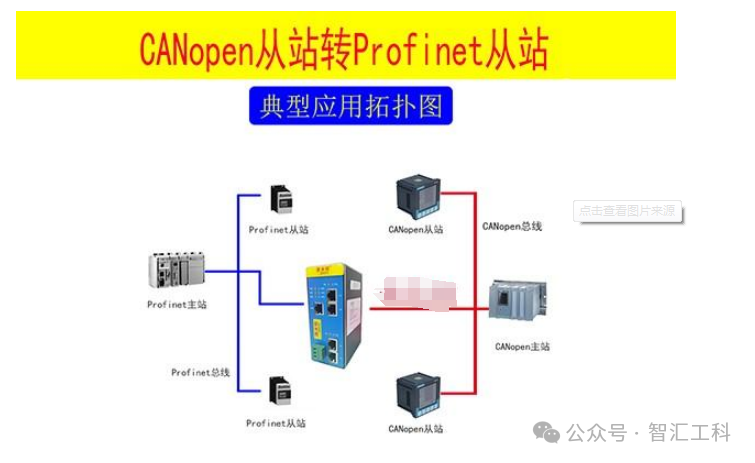
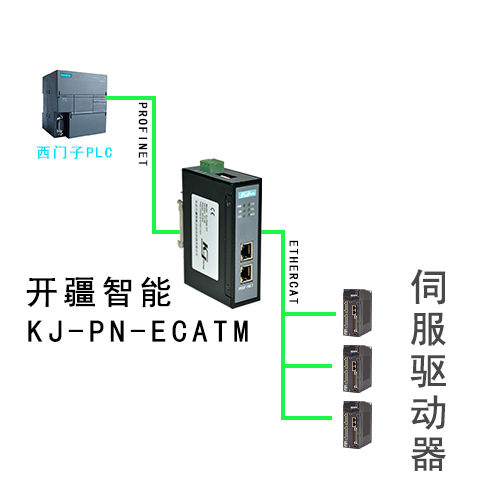
在某自動化生產線升級項目中,舊伺服電機采用 CANopen 協議,新控制系統基于 EtherCAT 網絡。為復用設備、降低成本,引入 EtherCAT 轉 CANopen 網關,實現新老設備互聯,支持伺服電機位置、速度、轉矩精準控制與狀態實時反饋,保障產線高效運行。
EtherCAN轉CANopen網關控制伺服電機

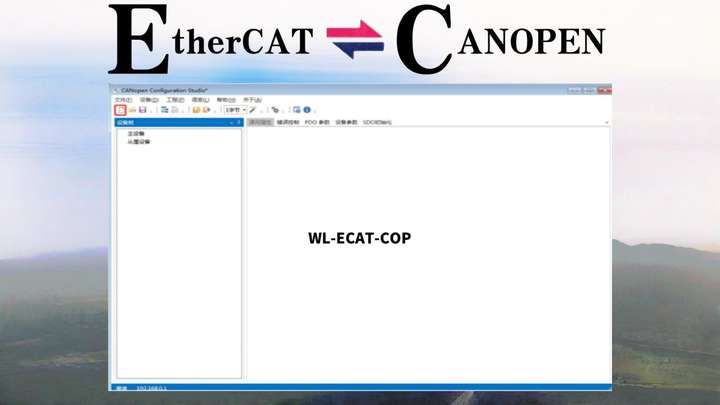
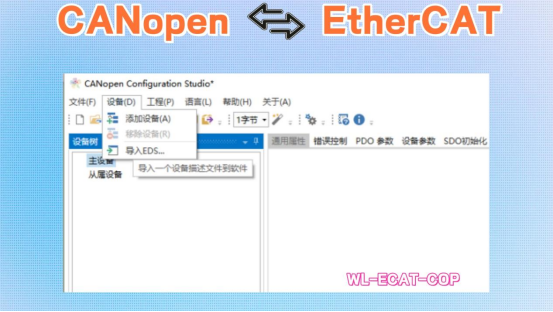
啟動CANopen Configuration Studio配置附屬軟件,創建一項新的項目:
通過點選操作將主站設備添加至列表,于設備列表中選定主站設備:
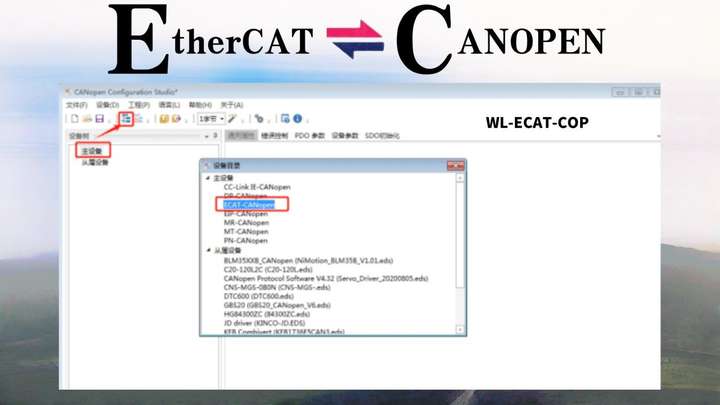
通過點選設備的方式,完成“子站描述文件”EDS文件的導入操作。

點選添加從站設備在設備目錄找到點選描述文件:
選定電機節點的標識符(ID)進行點選確認:
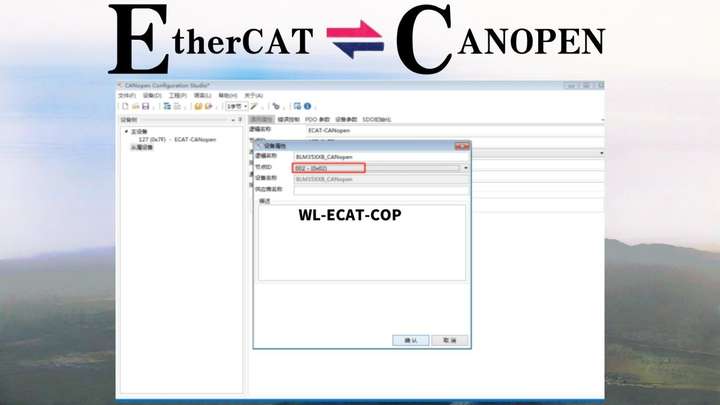
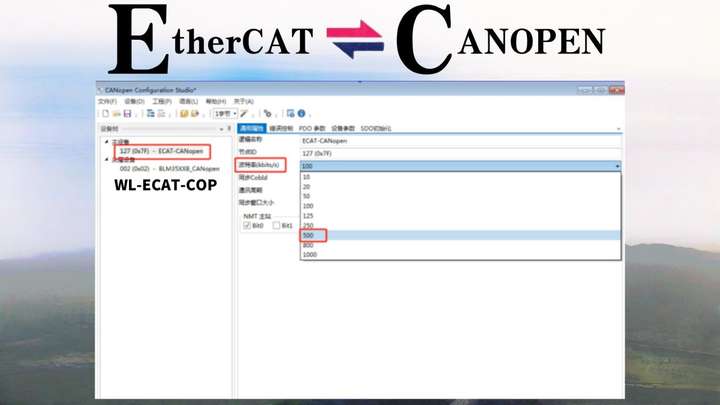
選取主設備,于通用屬性里對電機的波特率予以設置,需保證該波特率與伺服設備的波特率相一致。
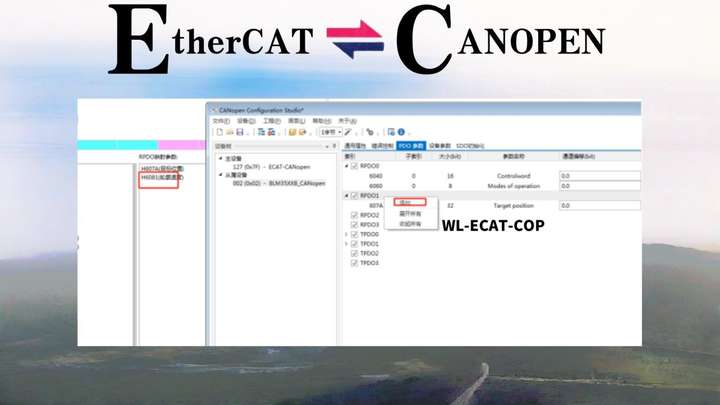
在站設備的PDO參數范圍內進行挑選,進而添加對應的PDO:
右擊打開添加:
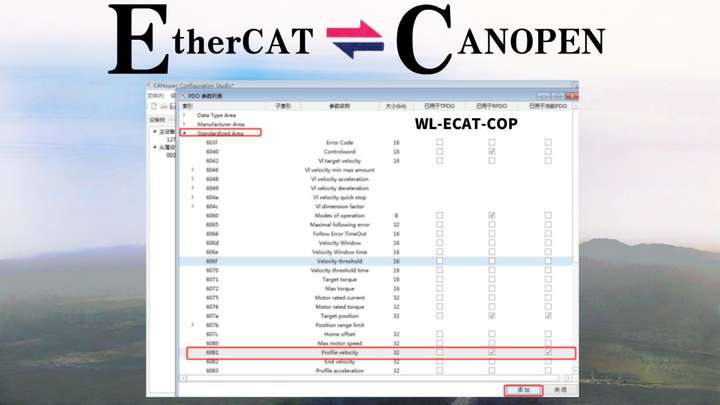
找到對應的PDO指令點選添加:
需要的指令添加完成以后打開工程點選自動偏移:
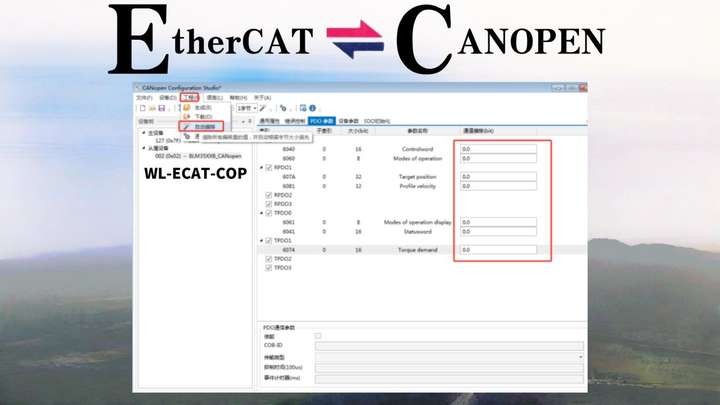
設置完成后點選生成:
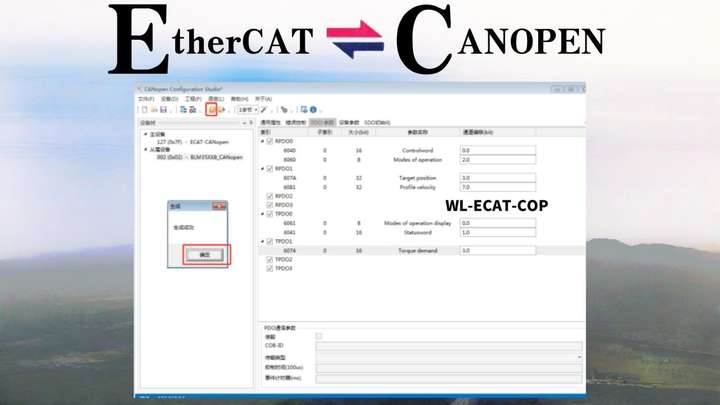
生成成功后點選下載:
通過以上在配置軟件上對 EtherCAT 轉 CANopen 網關與伺服器的配置步驟,可實現基于不同協議的設備高效通信與協同工作。在配置過程中,需嚴格按照步驟順序進行,確保各參數設置準確無誤,尤其要注意網關與伺服驅動器之間通信參數的一致性,如節點 ID、波特率等。同時,在完成初步配置后,還需進行全面的調試與優化工作,根據實際運行情況對相關參數進行微調,以達到最佳的控制效果和系統性能,滿足工業自動化生產的高精度、高可靠性要求 。
審核編輯 黃宇
-
CANopen
+關注
關注
8文章
404瀏覽量
44878 -
伺服器
+關注
關注
1文章
155瀏覽量
20054 -
ethercat
+關注
關注
19文章
1118瀏覽量
40026
發布評論請先 登錄
開疆智能EtherCAT轉CANopen網關連接埃斯頓伺服驅動器配置案例
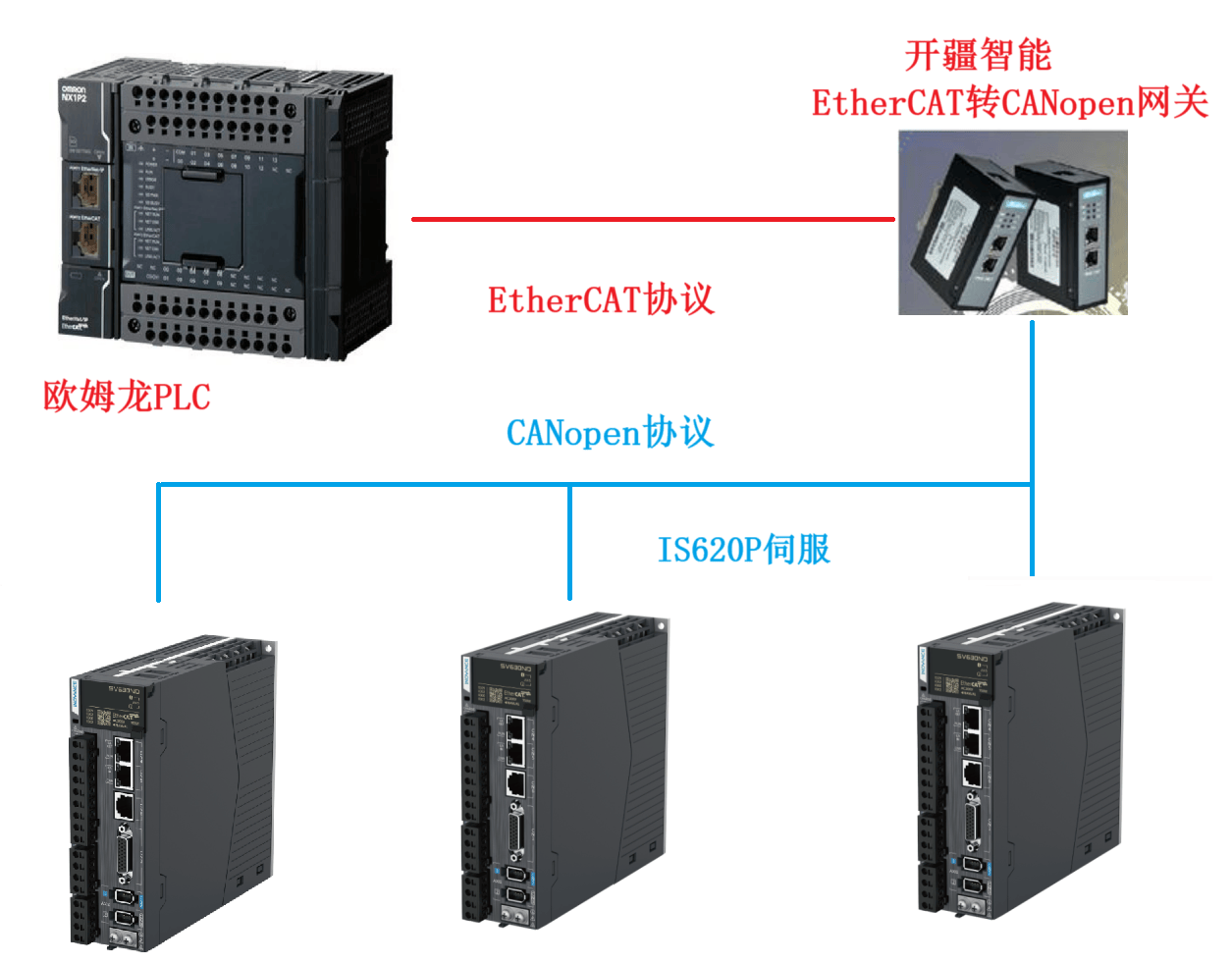
開疆智能EtherCAT轉CANopen網關連接IS620P伺服配置案例
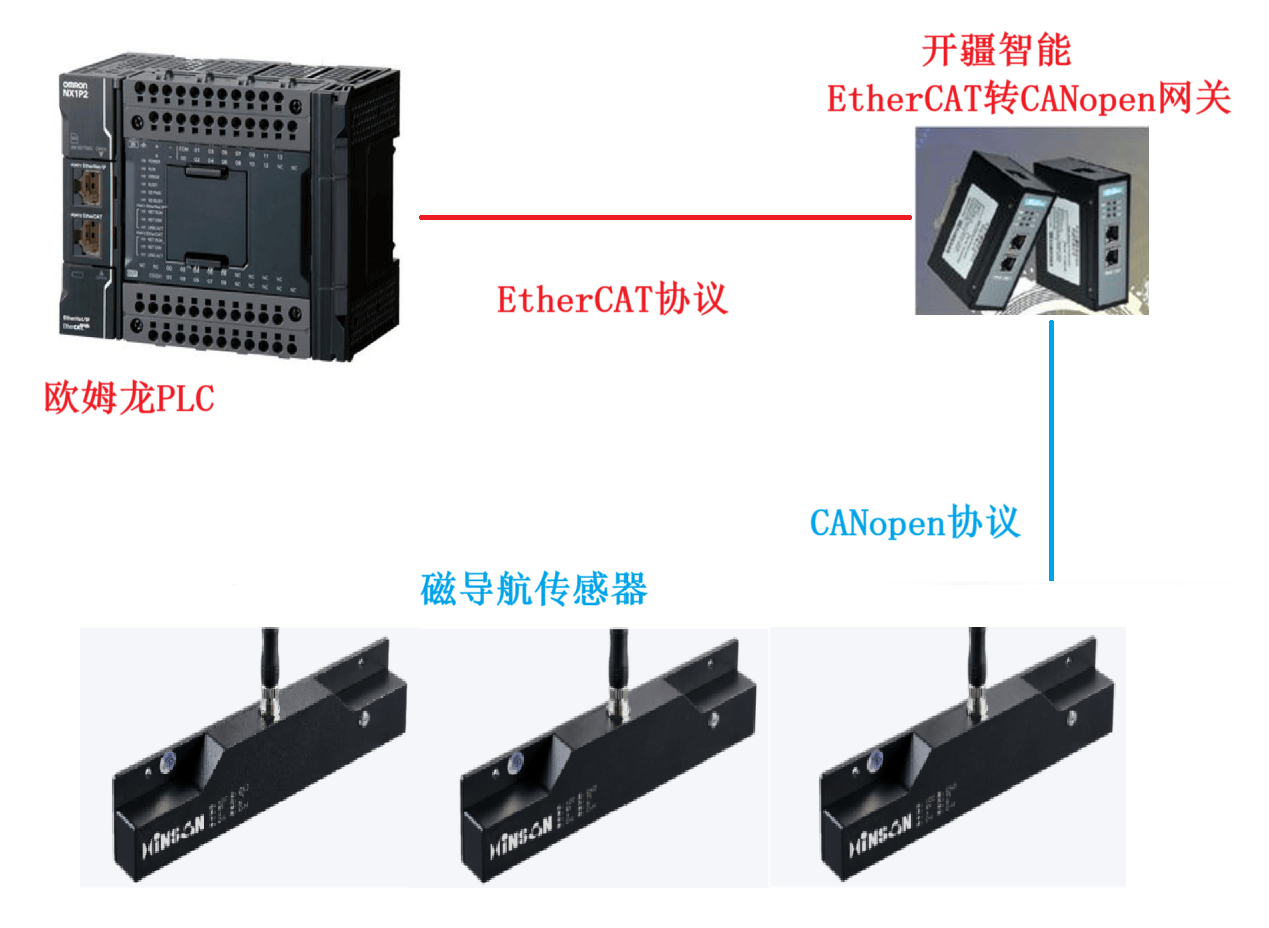
開疆智能EtherCAT轉CANopen網關連接磁導航傳感器配置案例
開疆智能Ethercat轉CANopen網關連接COMBIVERT 驅動控制器配置案例
開疆智能EtherCAT轉CANopen網關連接UV燈配置案例
開疆智能Ethercat轉CANopen網關連接中大力德無刷驅動器配置案例
開疆智能EtherCAT轉CANopen網關連接西克傳感器配置案例
開疆智能EtherCAT轉CANopen網關連接臺達伺服驅動器配置案例
CanOpen轉EtherCAT網關與臺達伺服的配置指南配置軟件篇
開疆智能CCLinkIE轉CANopen網關連接步科伺服驅動器配置案例

協議大和解:ETHERCAT轉CANopen網關配置

profinet轉ethercat連接伺服在工業現場的配置案例





 工商網監
工商網監
評論