 虹科干貨 | CANopen協議基礎知識——LSS服務
虹科干貨 | CANopen協議基礎知識——LSS服務
CANopen協議概述
CANopen是一種架構在CAN串行總線系統上的高層通訊協議,常被用于嵌入式系統與工業控制領域,包括電機控制、機器人制造、醫療、汽車等多個行業領域。本篇文章將主要介紹CANopen的LSS服務。
CANopen
LSS概述
Layer setting service (LSS)是CANopen的設置服務與協議(CiA 305),是具有LSS主功能的CANopen設備通過CAN網絡查詢或更改CANopen設備上物理層、數據鏈路層和應用層的三個數據,包括Node_ID、波特率、LSS地址(1018h)。
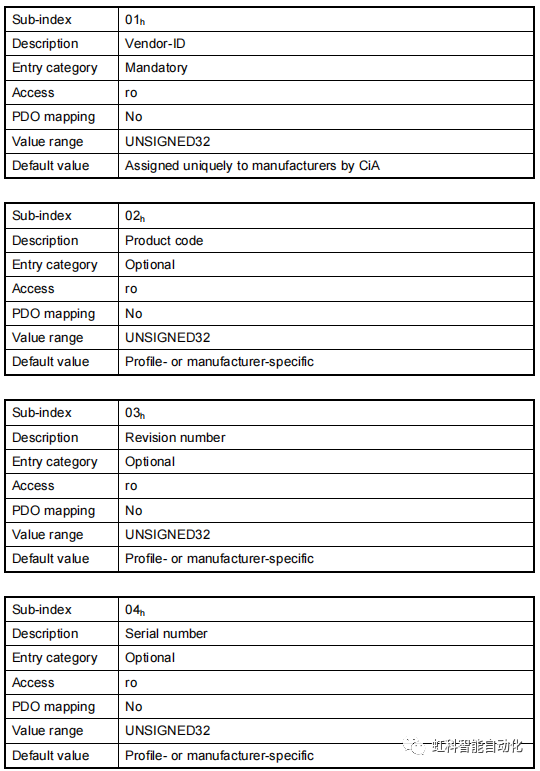
每個LSS從站都有唯一的LSS地址,其中包含了四個32位子索引的1018h Identity object對象(具體可見CiA301規范)。LSS從站可以處于配置模式和等待模式,LSS主站負責在兩個模式之間進行切換。
LSS協議的消息都是由8個字節組成,其中字節0始終包含服務的命令說明符(CS),同時LSS協議的兩個CAN-ID分別為7E5和7E4。
7E5h:用于從 LSS 主站發送至 LSS 從站的消息(請求)。
7E4h:用于從 LSS 從站發送至 LSS 主站的消息(響應)。
CANopen
LSS服務
LSS服務主要包括開關狀態服務、配置服務、查詢服務、識別服務,這里主要介紹開關狀態服務和配置服務。
開關狀態服務
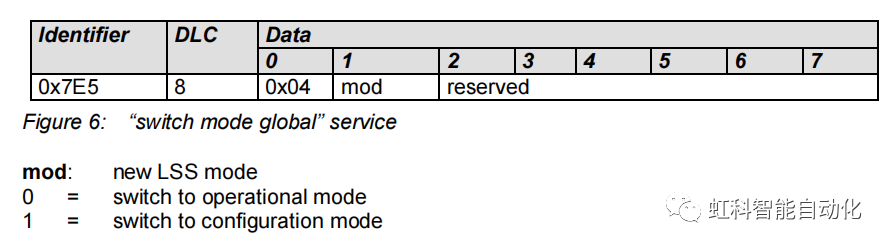
借助這個服務,LSS主站可以將LSS從站切換成配置模式或者等待模式,在配置模式下才能夠對LSS從站設備進行節點ID和波特率的更改,這里主要用到命令符號CS=40h。通過這個服務可以將網絡中的所有LSS從站切換為配置模式或者等待模式。
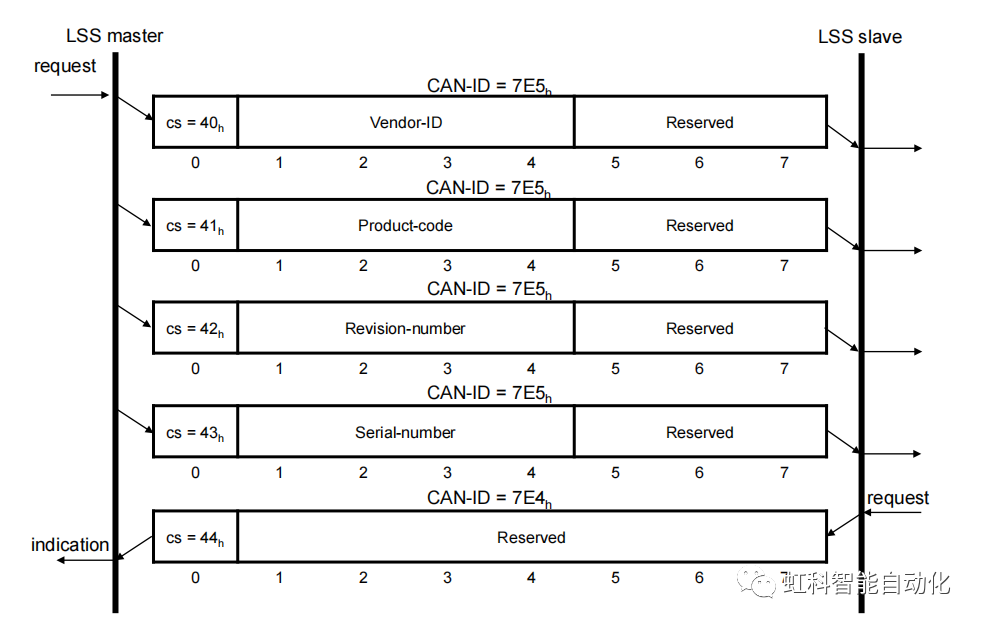
如果在整個CAN網絡當中不想操作所有的LSS從站,那么也可以通過LSS地址中的參數來操作相應的設備,這個時候LSS主站會發送四條消息(如下圖),之后相應的從站會切換到配置模式并發送確認。
配置服務
通過配置服務,LSS主站可以更改并且存儲(如果有必要的話)LSS從站節點ID和波特率。
1
配置節點服務
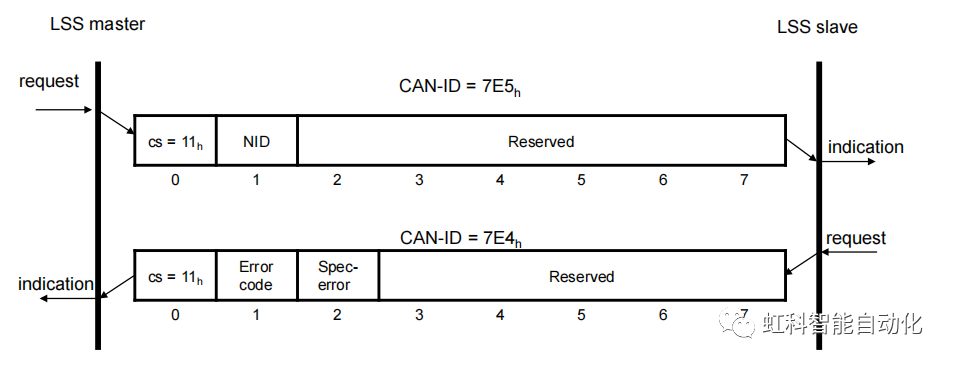
LSS主站向LSS從站發送新節點ID的消息,返回錯誤代碼 00h:沒有錯誤,01h:無效節點。
2
配置波特率服務
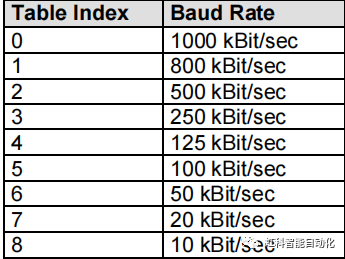
LSS主站向LSS從站發送新波特率的消息,返回錯誤代碼 00h:沒有錯誤,01h:波特率不支持,FFh:無效表索引
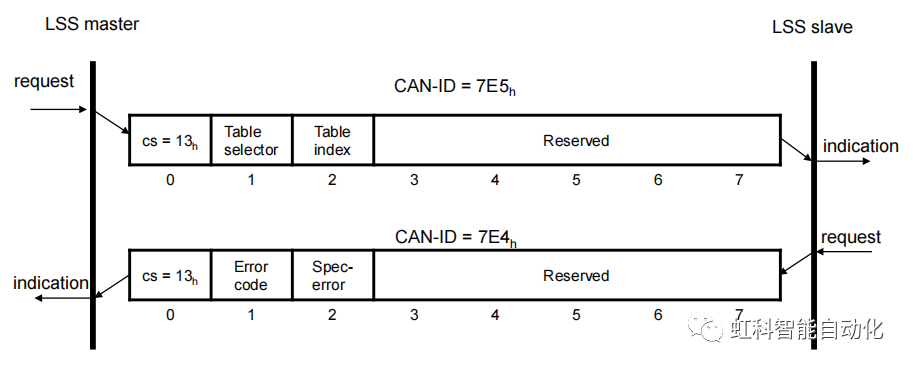
其中表索引與波特率的對應關系如下圖
3
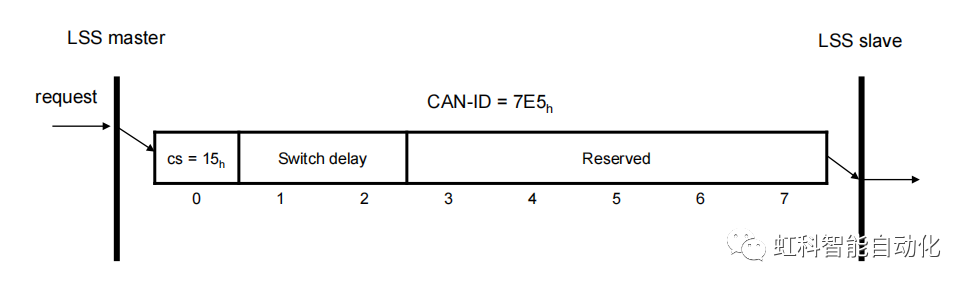
激活位計時參數服務
LSS 主站使用此命令同時激活網絡中所有 LSS 從站的設定波特率,其中Switch delay的單位ms,確保在可能再次發送消息之前,網絡中的所有 LSS 從站均具有相同的波特率。從每個 LSS 從站收到此消息之后,其中存儲的時間即是允許等待的時間。只有這時才能接受新的波特率,還可以再次等待相同的時間;只有這時 LSS 從站才能再次發送消息。
4
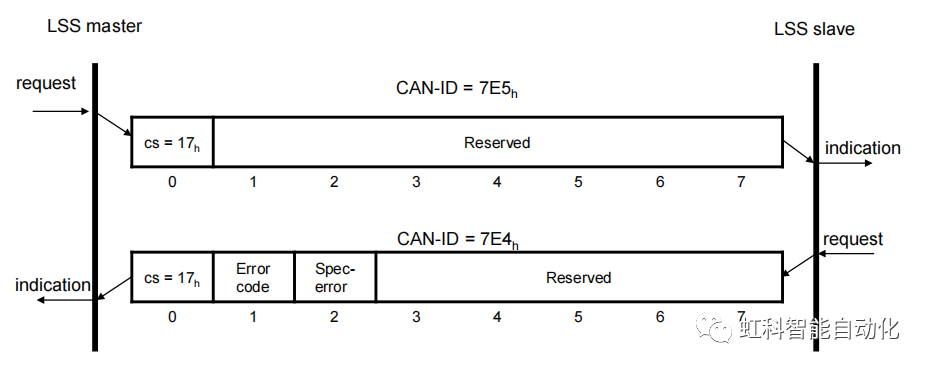
保存配置服務
通過這一服務,LSS主站可以保存重新設定的節點ID和波特率;在執行這一服務的時候LSS主站必須確保網絡中只有一個LSS從站處于配置模式。返回錯誤代碼 00h:沒有錯誤,02h:訪問非易失存儲器失敗。
CANopen
LSS服務示例
目前有一個LSS從站的參數設置節點ID=40h,波特率=1000kBd,現在需要將參數修改如下節點ID=04h,波特率=500kBd。那么將進行以下報文命令操作:
7E5 | 04 01 00 00 00 00 00 00
將LSS從站切換至配置模式
7E5 | 5E 00 00 00 00 00 00 00
查詢LSS從站的節點ID
7E4 | 5E 40 00 00 00 00 00 00
回復節點ID
7E5 | 11 04 00 00 00 00 00 00
將從站節點設置為04h
7E4 | 11 00 00 00 00 00 00 00
從站返回確認
7E5 | 13 00 02 00 00 00 00 00
將LSS從站波特率設置為500kBd
7E4 | 13 00 00 00 00 00 00 00
從站返回確認
7E5 | 17 00 00 00 00 00 00 00
LSS主站發送保存更改命令
7E4 | 17 00 00 00 00 00 00 00
LSS返回確認
7E5 | 04 00 00 00 00 00 00 00
將LSS從站切換至等待模式
705 | 00
控制器重啟接受新參數
虹科在CAN、CANopen等工業總線通訊領域深耕多年,有著深厚的技術實力,目前已面向國內市場推出了CANopen源代碼、CANopen數據記錄儀、網關、板卡等產品,并推出了虹科自研的CANopen IO模塊,性價比高,貨期穩定。此外,針對客戶在CANopen方面的培訓需求,虹科還推出了相關的課程培訓服務,歡迎撥打400-999-3848到虹科了解詳情。
-
CAN
+關注
關注
57文章
2885瀏覽量
466738 -
LSS
+關注
關注
0文章
8瀏覽量
2055
發布評論請先 登錄
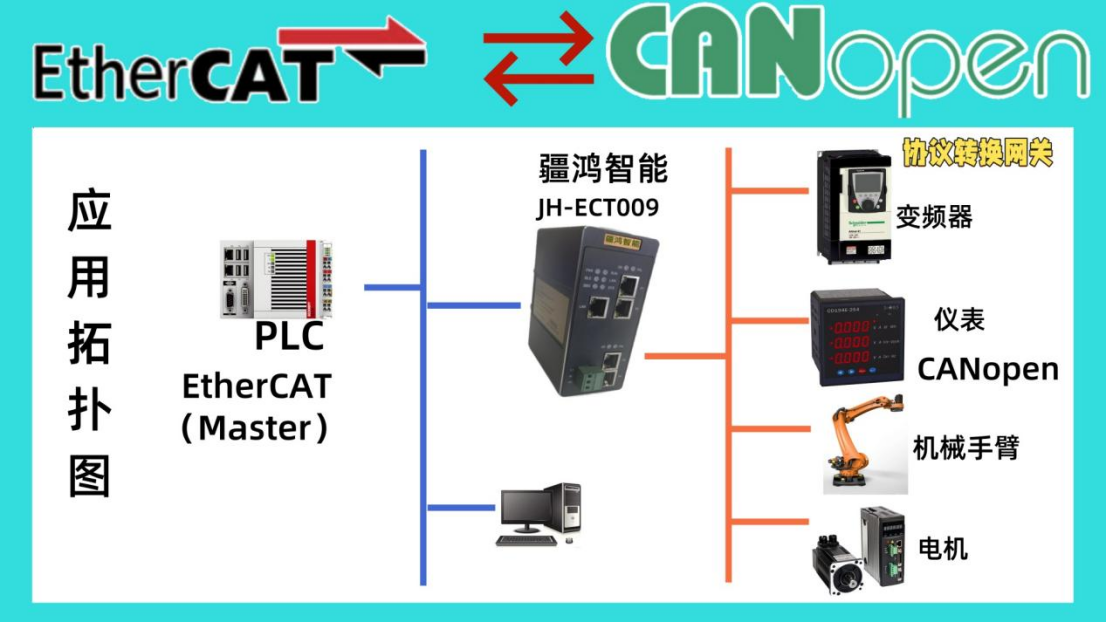
協議大和解:ETHERCAT轉CANopen網關配置

EtherCAT轉CANopen協議網關應用詳解
干貨丨Profinet轉Canopen網關,讓不同協議設備互聯互通
直播回顧 | 核心協議精講!TSN基礎知識理論培訓,虹科帶你劃重點!

使用ES32實現CANopen從機

虹科直播回放 | IO-Link技術概述與虹科IO-Link OEM
CanOpen轉Profinet總線協議轉換網關模塊連接步科電機的配置方法

2025必備知識,CANopen轉EtherCAT協議允許配備啥協議的電氣設備

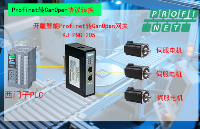
虹科應用 為什么虹科PCAN方案能成為石油工程通訊的首選?
CANopen協議架構和應用原理
EtherNet/IP轉CANopen主站協議轉換網關

EtherCAT從站轉CANopen主站協議網關(JM-ECT-COP)





 工商網監
工商網監
評論