IBS網絡的設置顯示相應模塊分配給的Interbus地址
在進行測試前要根據IBS網絡的設置,進行撥碼開關,1選擇2M ,2選擇標準格式,3選擇帶幾個電磁閥,....
機器人通過哪個端口將 WorkVisual PC 連接到控制系統上?
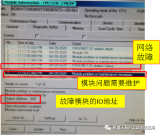
如果在一個 KRC4 上拆下了兩個 KSP 模塊,并且在其他模塊的相應插接位置處又重新安上,則將出現....
INTERBUS模塊的報警提示
SMC 輸入模塊無電源燈,沒有電源指示,用機器人控制夾具氣閥,有輸出,更換IO模塊故障依舊,因此判斷....
機器人主氣缸C50氣管連接說明
這次焊鉗的氣管接錯,沒有造成焊鉗故障報警,但是在焊鉗進行夾緊時出現卡頓現象。在作機器人E1軸移動時報....
用IOCTL函數可以詢問機器人控制系統的節能模式?
如果生產歇工很短,為了使用狀態驅動總線關閉,則可以用狀態制動器已制動節能。但是,只有在機器人控制系統....
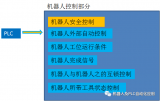
外圍設備連接到機械手方面的核心作用
文件IBSPCI1.INI位于控制器的Init目錄中。它包含Interbus PCI卡的參數化數據。
機器人運動過程等待條件FB SPS的結合BRAKE深入分析
如果處理中斷例程的時間短于主程序中制定的軌跡規劃,則機器人可不中斷而繼續運行。如果中斷例程所需的時間....
KUKA機箱內部安全組件之間通過EtherCAT和FSoE相互通訊
KUKA機箱內部安全組件之間通過 EtherCAT 和 FSoE(Fail Safe over Et....
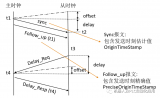
介紹一種新的以太網通訊系統
簡單一點說,PROFINET=PROFIbus+etherNET,把Profibus的主從結構移植到....
系統報警在HMI設備上所設置的語言輸出
系統報警由編號和報警文本組成。報警文本中也可以包含更精確說明報警原因的內部系統變量。對于系統報警,只....
激光打標機工藝設備介紹
在U1G1PLC程序中編輯前后條碼校驗程序,來控制傳送鏈放行夾具MZ12的打開,實現如果條碼重復不放....
研究微分系統的整體性質及其在擾動中的變化
微分在數學中的定義:由函數B=f(A),得到A、B兩個數集,在A中當dx靠近自己時,函數在dx處的極....
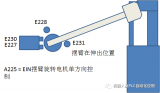
使用機器人自身計算值負載的重量值
TRIGGERWHEN DISTANCE=1 DELAY=0 DO SPS_TRIG(10006) ....
基于華為30年ICT技術積累和制造經驗
由于缺少數字化系統對研發流程進行管理,工程師大量的時間精力將花費在不增值的活動上,導致中小企業普遍研....


關于KUKA機器人的STEP程序說明
KUKA機器人的STEP常用于機器人的各種輔助功能,如電極銑削,膠桶的擺臂,CMT的槍頭清洗等






 工商網監
工商網監