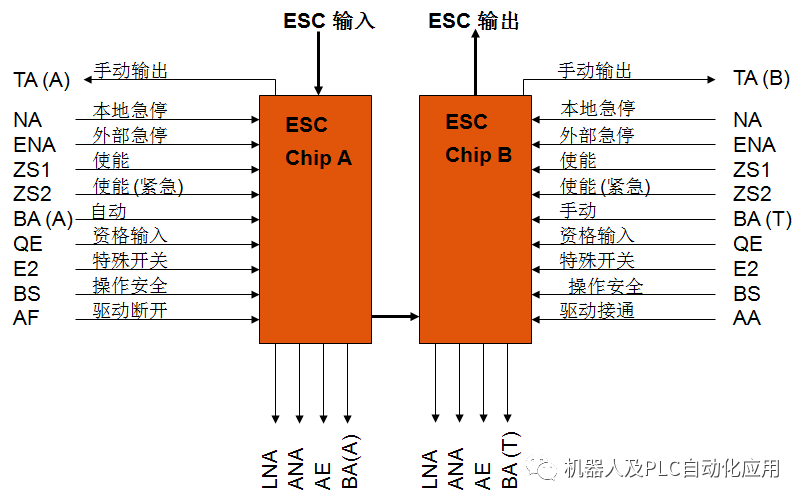
") 芯片的輸出定位與安全狀態(tài)
芯片的輸出定位與安全狀態(tài)
故障安全輸入
NA - 本地急停
ENA - 外部急停
ZS1 - 使能輸入
ZS2 - 使能, 緊急位置
BA - 操作方式 (手動(dòng)/自動(dòng))
QE - 資格輸入 (裝載位置, 范圍限制)
BS - 操作安全輸入 (安全門)
控制器輸出
AA - 驅(qū)動(dòng)接通
AF - 驅(qū)動(dòng)斷開
故障安全輸出
AE - 驅(qū)動(dòng)接通(驅(qū)動(dòng)接觸器)
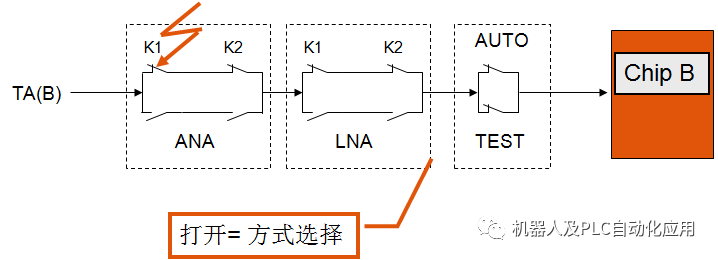
LNA - 外部急停
ANA -系統(tǒng)急停
BA - 操作方式 (手動(dòng)/自動(dòng))
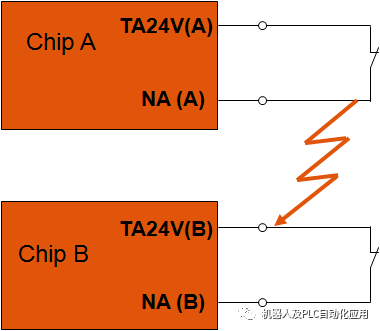
·輸入信號兩個(gè)通道的短路
·輸入信號的一個(gè)通道和電源短路
·通訊錯(cuò)誤 (例如:安全總線中斷)
·硬件錯(cuò)誤 (例如:檢測輸出繼電器觸點(diǎn)損壞)
·ESC 芯片損壞
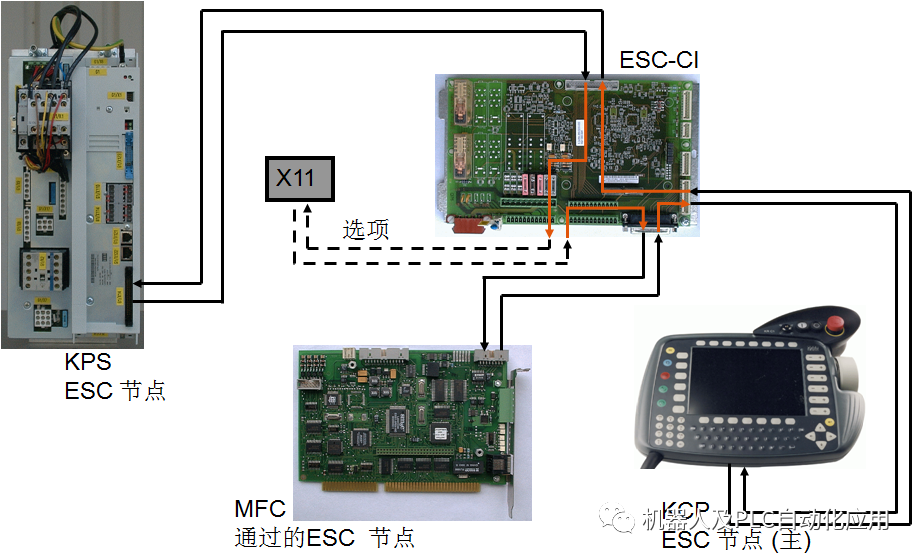
ESC 節(jié)點(diǎn)結(jié)構(gòu)
軟件和硬件安全功能
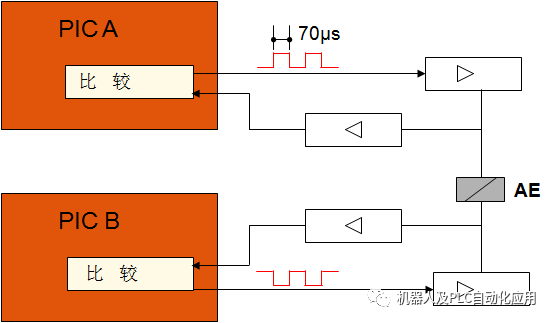
每個(gè)PIC發(fā)送一個(gè)脈沖給輸出并比較這個(gè)脈沖的返回信號
F10: Fks2A Vcc-Esc
F11: Fks2A Vcc-Esc
F12: Fks4A 外圍接口 Vcc
F13: Fks4A 外圍接口 Vcc
F16: Fks7.5A 外圍接口 Vcc
F14: Fks4A 驅(qū)動(dòng)接通
F15: Fks7.5A 驅(qū)動(dòng)接通
F1: Fks2 A 驅(qū)動(dòng)接通
ESC-錯(cuò)誤識別
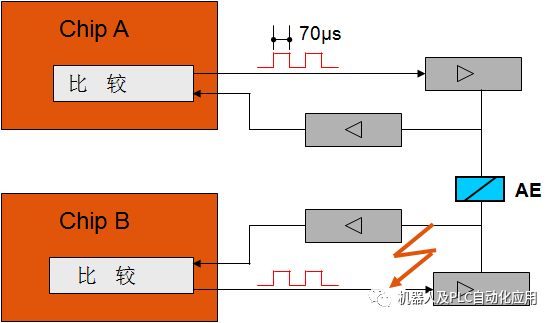
每個(gè)芯片傳一個(gè)脈沖給他的輸出,并且用這個(gè)樣本比較傳導(dǎo)的信號不一致的輸出定位安全狀態(tài)。
AE LNA ANA
循環(huán)1 1 0 1
循環(huán)2 0 1 0
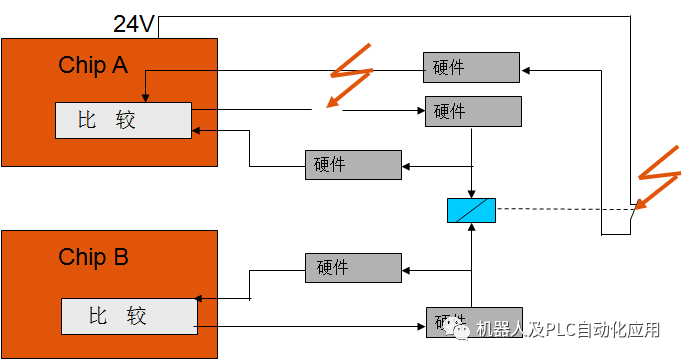
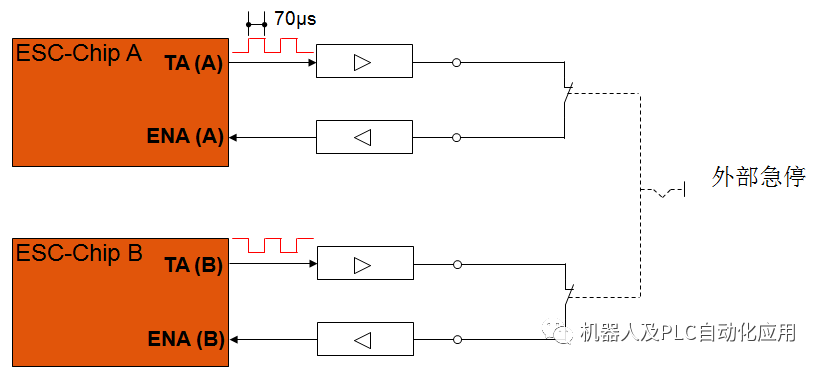
每個(gè)芯片比較輸出信號和返回信號。不一致的輸出定位安全狀態(tài)。
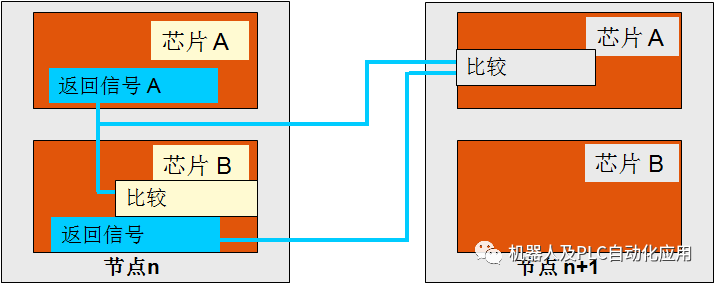
芯片 B 比較 A和 B 自己節(jié)點(diǎn)的文本文件
芯片 A 比較 A 和 B上一個(gè)節(jié)點(diǎn)的文本文件
不一致的輸出設(shè)為安全狀態(tài).
責(zé)任編輯:pj
-
芯片
+關(guān)注
關(guān)注
459文章
52119瀏覽量
435596 -
PIC
+關(guān)注
關(guān)注
8文章
507瀏覽量
88666 -
外圍接口
+關(guān)注
關(guān)注
0文章
7瀏覽量
6921
發(fā)布評論請先 登錄
UWB 定位測距
云酷科技藍(lán)牙人員定位系統(tǒng):精準(zhǔn)定位+智能管理,開啟企業(yè)安全管理新范式

如何借助衛(wèi)星定位終端實(shí)現(xiàn)滑坡監(jiān)測預(yù)警

CDCLVD2104沒有輸入,此時(shí)輸出是什么狀態(tài)?
杭州中科微AT6558R北斗定位芯片 GPS雙模定位模塊芯片
DCDCSL3160 dcdc150V高耐壓 輸出5.1V/1A 降壓恒壓車載GPS供電電源芯片
安全無憂,單北斗定位工作記錄儀守護(hù)每一刻

基于ST第五代高精度定位芯片的車載定位P-BOX方案

人員定位系統(tǒng)的作用是什么,為什么要應(yīng)用人員定位系統(tǒng)
人員定位管控系統(tǒng)如何解決廠區(qū)內(nèi)安全管控問題?
組合邏輯電路輸出狀態(tài)取決于哪些因素
單穩(wěn)態(tài)觸發(fā)器的輸出狀態(tài)有哪兩種
比較器的輸出有幾種狀態(tài)
運(yùn)放不加電輸出是什么狀態(tài)
智能安全帽_北斗高精度定位|生命體征監(jiān)控_智能頭盔解決方案






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論