


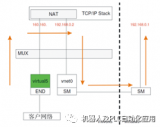
KUKA機器人PN網絡設置的限制
為了使外部PC能夠通過網絡連接到機器人控制器,必須對KLI進行配置。例如,這是能夠通過網絡將Work....


S7-200模擬量使用應該搞清的16個基本問題
同一個模塊的不同通道是否可以分別接電流和電壓型輸入信號? 可以分別按照電流和電壓型信號的要求接線。但....

?KUKA機器人固定焊鉗的銑削控制
-當有銑削時出現圈數故障時,會先把擺臂擺回,然后停在66步等待復位,如果復位會返回到第51部,重新銑....

KUKA機器人對于涂膠設備的清膠控制
F346激活原位清膠,!A15機器人在原位和F356固定涂膠,或者F356固定涂膠和E2115擺臂在....
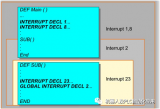
KUKA機器人力矩監控變量的控制使用簡介
變量$TORQMON包含程序模式下軸轉矩的當前公差范圍。該公差范圍是使用文件…STEU Mada $....

VW大眾標準中BAS()程序的使用淺談
IF (($LOAD.M0) AND ($LOAD.J.X==0) AND($LOAD.J.Y==0....






TOPEX激光RFID標簽系統設備
在U1G1PLC程序中編輯前后條碼校驗程序,來控制傳送鏈放行夾具MZ12的打開,實現如果條碼重復不放....
PFO飛行熱熔激光焊接
機器人在執行飛行焊接程序時,通過KUKA 用戶程序調用焊道的程序號,給PFO軟件,然后PFO軟件將此....
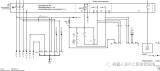
WINCC面板的關閉/打開SV及KV柜Q1主空開的控制原理
If (R_TRIG_SK90_ZutrittAnfo.Q Or F_TRIG_K90_Zutrit....
滾床出車完成信號沒清故障
首先找到故障點,09CD010F,對故障碼進行拆分:09CD16進制轉十進制DB塊2509,01不變....





 工商網監
工商網監