



KUKA工具之CZ電伺服鉚鉗ECKOLD技術
通過ECKOLD軟件(通過客戶提供的系統,在現有工業PC上)進行過程監視和控制的可視化.


生降位的電機控制-SEW-MOVIPRO
?X5520-STO安全點直接控制變頻器的功率單元以及抱閘的控制單元,接通后使抱閘和電機可以控制。
$DSECHANNEL數字伺服系統軸通道的分配
可以在此處配置以下機器數據:1.外部軸數或運動系統中的軸數
2.剎車控制方式



KUKAC4機器人電機風扇故障,使得機器人沒有好使能.
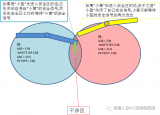
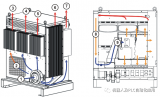
箱柜冷卻裝置包含兩條冷卻循環回路。裝有控制、功率電子元器件的箱內范圍通過一個換熱器進行散熱。在箱柜的....


C4機器人與PLC的通信IO域更改擴展
在全自動化生產線上,必須對過程進行監控和協調,例如狀態監測和過程控制。這個任務通常由 PLC 來承擔....


變頻器電路由主電路和控制電路組成
1、交-直-交變頻器是現在最常使用的變頻器,按直流環節的儲能方式分為電壓型變頻器、電流型變頻器,按輸....
限制電動機啟動電流的要求是什么?
當負載對電動機啟動力矩無嚴格要求又要限制電動機啟動電流,電機滿足380V/Δ接線條件,電機正常運行時....
關于EtherCAT的性能
1000 個I/O 的更新時間只需30 μs,其中還包括I/O 周期時間。單個以太網幀最多可進行14....
編碼器是把角位移或直線位移轉換成電信號的一種裝置
編碼器是把角位移或直線位移轉換成電信號的一種裝置。前者稱為碼盤,后者稱碼尺.按照讀出方式編碼器可以分....
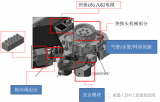
機器人的電機位置測量元件
轉子 (3)通過旋轉式變壓器 (2)接受一個電壓裝置 (1)的供電 (頻率 = 8kHz)。在定子線....

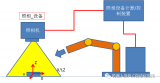
矢量發動機機械科技機械原理
使用推力矢量技術的飛機不僅其機動性大大提高,而且還具有前所未有的短距起落能力,這是因為使用推力矢量技....






 工商網監
工商網監