對于初學來說,容易 在ENO的使用上出錯誤,由于不清楚ENO來龍去脈,經常認為只要調用FC是無條件的....

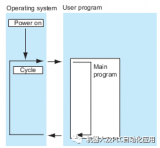
每個CPU都帶有集成的操作系統,組織與特定控制任務無關的所有 CPU功能和順序。
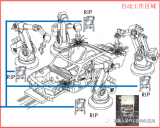
控制RIP的USER程序在這里.正常情況下這個是大眾統一的標準程序.我只能說出像問題的概率是很低的!....
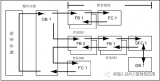
該指令可用于調用子程序并將子程序調用鏈接到條件(布爾操作數)。如果需要,可以鏈接多個操作數(最多11....

上升(下降)沿不工作也是一種常見的錯誤,盡管手冊中“P”或“N”指令允許的數據類型為:I,Q,M ,....

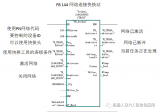
工業以太網在進行數據交換時使用它自己的協議,該協議在訪問模塊時不使用 TCP/IP 協議,而使用正確....

如果在 SFC12 中沒有需要激活或去活的任務,則讀出設備的當前狀態。若某個設備被去活,則將其輸入....
程序位于文件夾 R1Program 中。默認情況下,它不含指令。在需要時,用戶可以在 CollDet....

HMI 系統相當于用戶和過程之間的接口。 過程操作主要由 PLC 控制。 用戶可以使用 HMI....

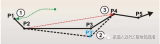
BCO運行后設置此輸出。因此,機器人控制器會與上級控制器通信,使機器人位于編程路徑上,只有當機器人離....
控制RIP的USER程序在這里.正常情況下這個是大眾統一的標準程序.我只能說出像問題的概率是很低的!....
如果在初始化階段中出現故障,則中間的軸調節器 LED 閃爍。其他 LED 指示燈熄滅。軸調節器的紅色....
對于一代精簡面板KTP600 Basic color PN:在Channel1中選擇Enable C....
在 SIMATIC S7 上運行 RF180C 時,為用戶提供了方便的函數塊 (FB 45/FB 5....
此時會啟動運行系統仿真。 啟動仿真后,“運行系統仿真器”(RT Simulator) 窗口中將顯示....

在當前樣條組內的任意一個段點選擇語句均可不受限制。這被視為針對當前運動的語句選擇,因為機器人控制系統....

掃描循環時間是操作系統運行循環程序和中斷循環的所有程序部分(例如,執行其它組織塊)以及系統操作(如,....
如果用作程序卡,則可以在存儲卡上裝載用戶程序。這種情況下,存儲卡將替代設備的內部裝載存儲器,且內部裝....
對于顯示屏較小的 CPU,經常會超出顯示屏可用寬度。如果將光標放置在顯示屏的相關值處并按下左箭頭鍵,....
當調用功能“硬件診斷”后,診斷符號將會顯示在在線視圖以及快速視圖(默認設置)或診斷視圖的項目窗口中。....
指定機械手控制器是否為Office PC。通常不是這種情況,即不要激活復選框。(Office PC ....
機器人通過信號“關閉噴槍”或“開始學習示教位置”激活均衡器。對于每個焊接點,機器人會發送適當的二進制....
WorkVisual 硬件驅動程序匯總在一個 DTM 目錄中。除了剛剛介紹過的 GSDML 文件外,....

為了確保安全的PROFINET通信,必須根據下表配置PROFINET組件的更新時間。 請注意,所有設....

MakroTrigger宏包含8個預定義的觸發器,尚未包含任何語句。用戶可以根據特定要求編寫ram語....

FB41用于通過使用連續的變量輸出在SIMATIC S7控制系統中實現技術過程控制。除了設定點操作和....

如果控制系統確定通過現場總線驅動程序引起了一個故障,將在SmartPAD 的信息窗口中給出一條信息。....

對話的返回值:對話的“句柄 (handle)”。用該“句柄”可檢查是否成功生成了對話。同時,“ 句柄....

如果編譯的運行無法自動去除所有塊不一致性,則相應對象將在輸出窗口中以錯誤消息標記。將鼠標移至相關的錯....

所以在循環程序處理過程中,CPU的過程信號映象是一致的。CPU并不直接訪問I/O 模板上的輸入(I ....





 工商網監
工商網監