") KUKAC4通過逆向啟動鍵執(zhí)行反向運行
KUKAC4通過逆向啟動鍵執(zhí)行反向運行
通過逆向啟動鍵執(zhí)行反向運行

逆向啟動鍵。用逆向啟動鍵可逆向啟動一個程序。程序?qū)⒅鸩竭\行。
行反向運動 (通過逆向啟動鍵):
如果應(yīng)優(yōu)化運動的序列并且為此目的重新示教各個點,則通過逆向啟動鍵經(jīng)常使用反向運行。用戶沿軌跡反向運動,直到到達待修正的點。在重新示教此點之后,必要時繼續(xù)向后運行,以修正其他點。
后退時,自動采用程序運行方式 #BSTEP。
$PRO_MODE程序運行模式#BSTEP后退步進: 連續(xù)后退執(zhí)行到程序的開始.
后退時不能進行軌跡逼近或擺動。如果前行時這些點已被軌跡逼近或擺動,則返回軌跡將不同于前行軌跡。由此在逆向啟動后,盡管機器人完全沒有脫離前行軌跡,但它可能必須先執(zhí)行一次 BCO 運行。
BCO 運行必須作為 LIN 或 PTP 運動從實際位置移動到目標位置。速度已自動下降。無法確保預(yù)見運動過程。在 BCO 運行時觀察運動,以便有發(fā)生碰撞的危險時機器人可及時停止。
操作步驟:
1.按住確認開關(guān),直至狀態(tài)欄 “ 驅(qū)動器已準備就緒 ” 顯示:

2. 按下并且按住逆向 (后退)啟動鍵。
? 如果機器人已經(jīng)位于后退軌跡上,則即刻后退。
? 如果機器人沒有位于后退軌跡上,則即刻駛向那里。當信息窗口顯示“已達 BCO” 時,說明機器人已經(jīng)達到此軌跡。機器人停下。重新按下逆向啟動鍵。機器人現(xiàn)在后退。
2.對每一個運動組都要重新按下逆向啟動鍵。
反向運行的工作原理和特性:
工作原理 :
正向運行時,機器人控制系統(tǒng)將執(zhí)行完畢的運動存在一個環(huán)形緩沖器中。反向運行時,根據(jù)所存的信息執(zhí)行這些運動。
刪除緩沖器后不可反向運行:
下列情況下將刪除緩沖器的內(nèi)容。只有當重新執(zhí)行正向運動后,才可再次執(zhí)行反向運動。
l重置程序。
l選擇程序。
l在程序中添加或刪除行。
lKRL 指令 RESUME
l語句選擇另一種運動作為當前運動。
在當前樣條組內(nèi)的任意一個段點選擇語句均可不受限制。這被視為針對當前運動的語句選擇,因為機器人控制系統(tǒng)把一個樣條組作為一個運動進行設(shè)計和執(zhí)行。
機器人控制系統(tǒng)刪除緩沖器,對此不發(fā)出提示信息。
屬性:?
l僅在運行方式 T1 和 T2 下可反向運行。
l在反向運行時,僅僅執(zhí)行運動,無控制結(jié)構(gòu)和控制指令。
l在正向運行時不記錄輸出端和旗標。所以反向運行時不能恢復(fù)之前的狀態(tài)。
l速度和前行時相同。
監(jiān)控裝置會在運行方式 T2 下反向運行時作出響應(yīng),而在正向運行時沒有反應(yīng)。在此情況下,必須降低程序倍率。
l反向運行默認為激活。專家用戶組可取消激活反向運行或在特定運動中有針對性地阻止反向運行。
有子程序時的特性
l? 在一個中斷程序中前行的運動不被記錄。所以也不能后退。
l? 如果一個子程序在前行時已完全運行完畢,則無法后退運行。
l? 如果前行運動在子程序中停止,則后續(xù)反應(yīng)取決于預(yù)進指針的位置:
| 預(yù)進指針在子程序中。 | 可后退。 |
| 預(yù)進指針已脫離子程序。 |
不可后退。 預(yù)防措施:在子程序結(jié)束前觸發(fā)預(yù)進停止的指令,例如:用 WAIT SEC 0 指令。但之后此處無法再進行軌跡逼近。或?qū)?$ADVANCE 設(shè)為 "1"。無法始終防止故障信息出現(xiàn),但可降低概率。仍可進行軌跡逼近。 |
軌跡逼近時的動作
后退時不能進行軌跡逼近。如果前行時這些點已軌跡逼近,則退回軌跡將不同于前行軌跡。因此在逆向啟動后,盡管機器人完全沒有脫離前行軌跡,但它可能必須先執(zhí)行一次 BCO 運行到后退軌跡上。
在逼近區(qū)域外的逆向啟動:
當機器人位于軌跡上,但不在逼近區(qū)域內(nèi)時,按下逆向啟動鍵。機器人現(xiàn)在在軌跡上后退到上一次運動的目標點。
PBACK = 按下逆向啟動鍵時機器人的位置
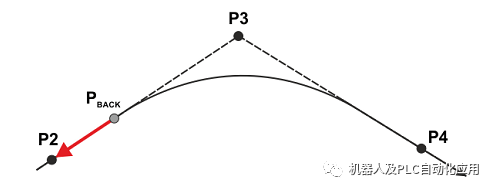
當上一次運動的目標點被軌跡逼近后,仍會精確地移至此點。
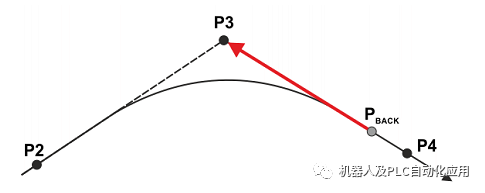
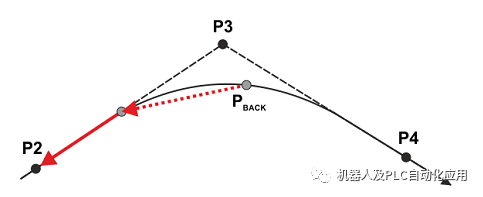
在逼近區(qū)域內(nèi)的逆向啟動:
當機器人位于逼近區(qū)域內(nèi)時,按下逆向啟動鍵。現(xiàn)在機器人在逼近區(qū)域的起始處執(zhí)行 BCO 運行并且在此停機。如果現(xiàn)在再按一次逆向啟動鍵,則開始原來的反向運行,即機器人在軌跡上后退到上一次運動的目標點。
從后退切換至前行:
僅滿足以下前提條件時才允許在后退后重新向前運行:
l? 可以對后退語句指針所在的程序行進行語句選擇。
l? 如果應(yīng)重新前行的第一個運動是常規(guī)運動,則必須已對其完全編程。
例如:如果第一項運動是 PTP_REL,則無法從后退切換至前行。除了少數(shù)例外情況,樣條運動不會受到這種限制。
如果后退后首次按下啟動正向運行按鍵,則特性如下:
l? 如果有 BCO,則自動恢復(fù)上一次前行程序運行方式,機器人沿軌跡向前運行。
l? 如果沒有 BCO,則執(zhí)行 BCO 運行。在此期間,程序運行方式還在 #BSTEP 上。機器人在 BCO 運行后停機。此時必須再次按下啟動正向運行(前行)按鍵。自動恢復(fù)上一次前行的程序運行方式,機器人此時沿軌跡向前運行。
如果在一個控制結(jié)構(gòu)內(nèi)從后退切換至前行,則機器人先前行至控制結(jié)構(gòu)的末端。然后機器人伴隨信息提示 “下一語句 { 語句編號 } 的控制結(jié)構(gòu)”停止運行。該語句編號給出控制結(jié)構(gòu)后的第一個語句。
責任編輯:lq
-
控制系統(tǒng)
+關(guān)注
關(guān)注
41文章
6751瀏覽量
111745 -
機器人
+關(guān)注
關(guān)注
213文章
29435瀏覽量
211386 -
程序
+關(guān)注
關(guān)注
117文章
3819瀏覽量
82347
原文標題:KUKAC4通過逆向啟動鍵執(zhí)行反向運行
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應(yīng)用】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
逆向工程 拆解F-4戰(zhàn)斗機的三軸姿態(tài)指示儀

如何在i.MX 8XDXL EVK的A35上運行Yocto Linux,在M4上運行FreeRTOS?
三一挖掘機一鍵啟動開關(guān)易壞的原因及更換注意事項
基于Docker鏡像逆向生成Dockerfile


如何逆向破解世嘉游樂設(shè)備的條碼啟動系統(tǒng)
開關(guān)柜一鍵順控如何防止開關(guān)柜電氣誤操作事故

過壓保護、防反接、緩啟動電源保護電路的原理
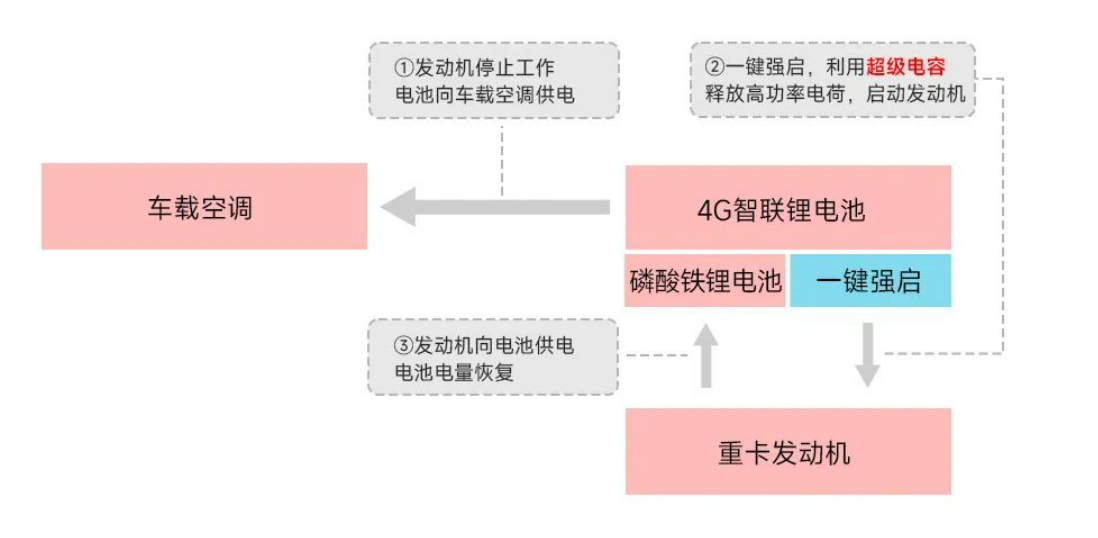
AMEYA360:永銘超級電容助力4G智聯(lián)鋰電“一鍵強啟”功能





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論