 一個機器人進行自動化升級改造,應該加一些什么設備呢?
一個機器人進行自動化升級改造,應該加一些什么設備呢?
如果想在兩個手動工位間加入一個機器人進行自動化升級改造,應該加一些什么設備呢?頭腦風暴一下,應該有安全門,圍欄,SICK光電,機器人,機器人E2鑰匙門盒,PN/PN耦合器,這樣在不添加CPU的情況下應該是最相對合理的.
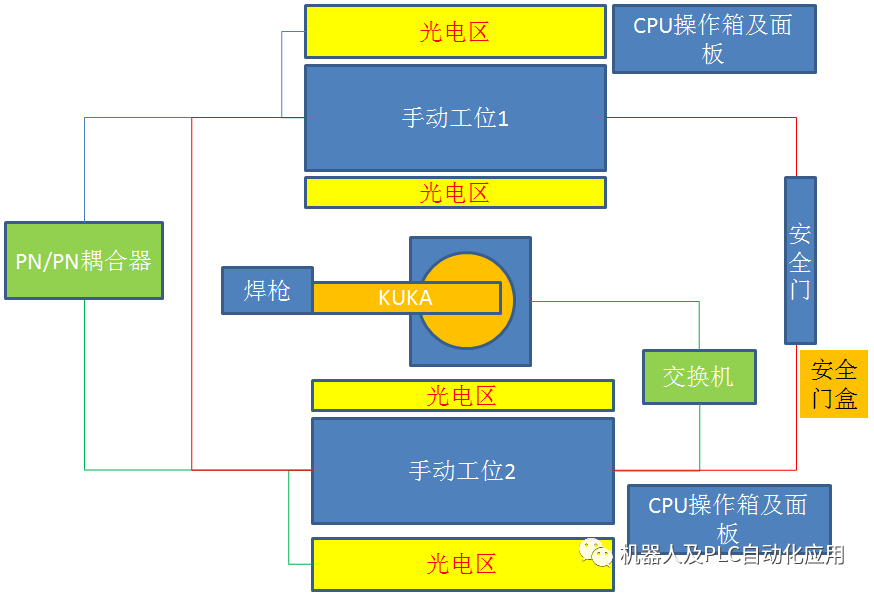
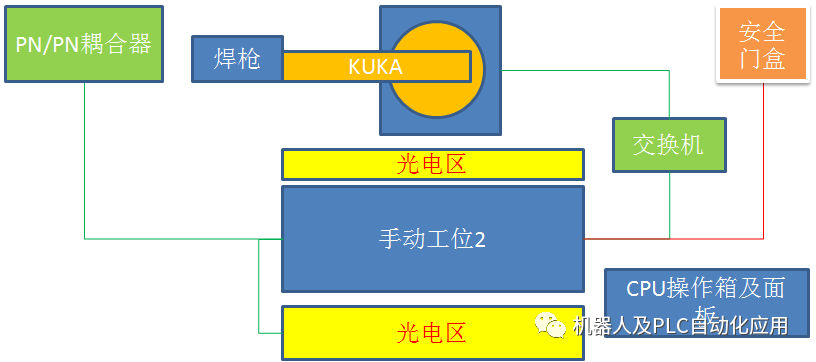
這樣以2 號手動夾具為基礎形成了一個小的工作組.網絡布局圖.
由于手動線使用小型IM151-8F PN/DP CPU ,由于需要加入機器人和光電等設備,將CPU的存儲卡換成2M卡或者8M卡。
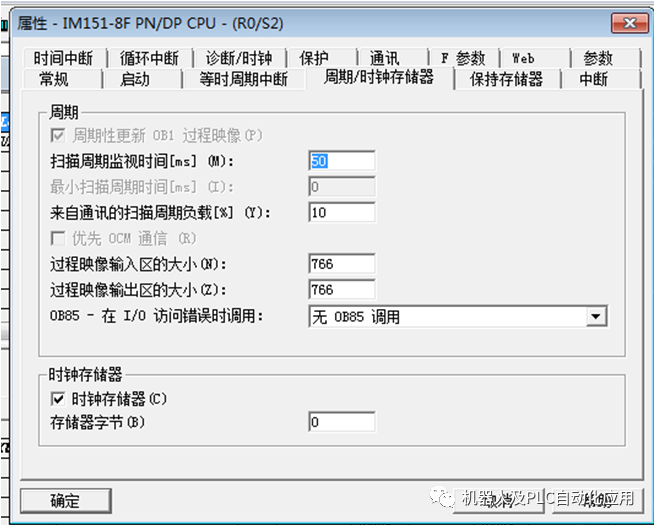
根據手動工位的IO多少,新加設備也很少,一般情況下基礎設置不用改變。
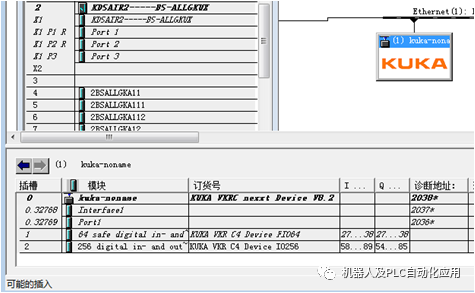
根據設計可以使用C4機器人在PN網絡下。

添加PN/PN耦合器與另一手動工位相關聯,實現自動聯動.
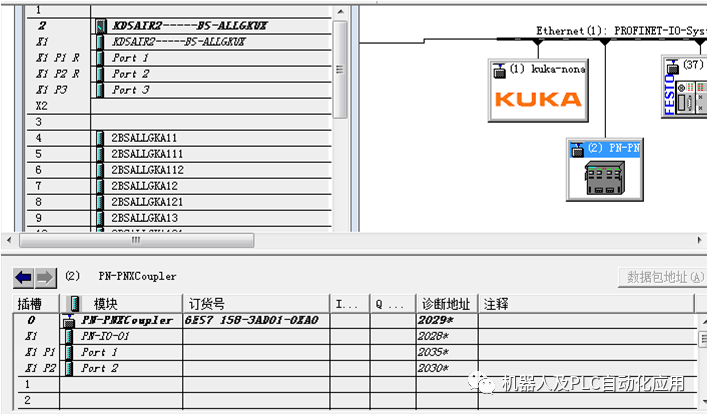

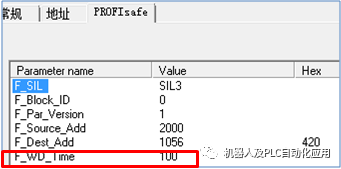
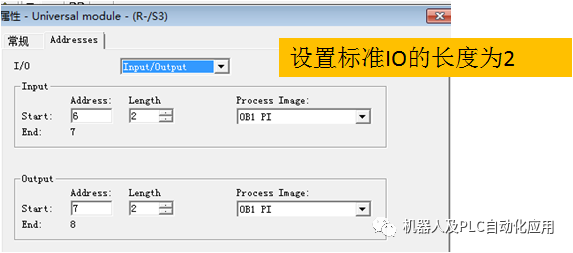
設置PN/PNCoupler的安全IO和標準IO

添加SICK光電
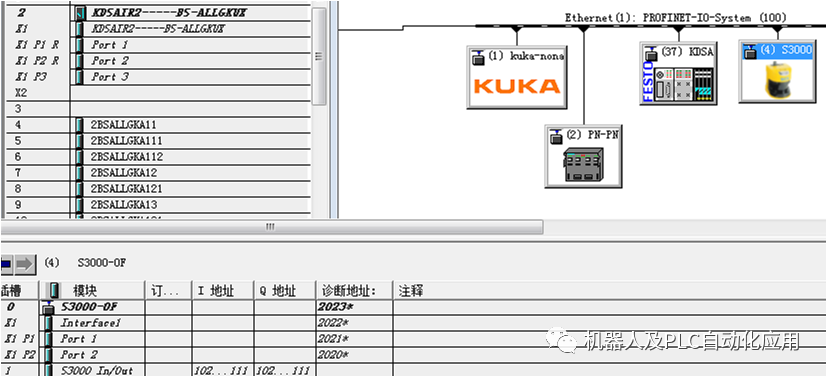
1.在現有的PLC程序中的組態程序中添加光電設備,
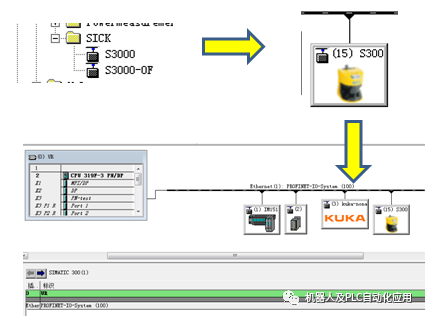
在PROFINET網絡中SICK光電設備分兩種,
1.銅纜網卡的SICK光電,
2.光纜網卡的SICK 光電.

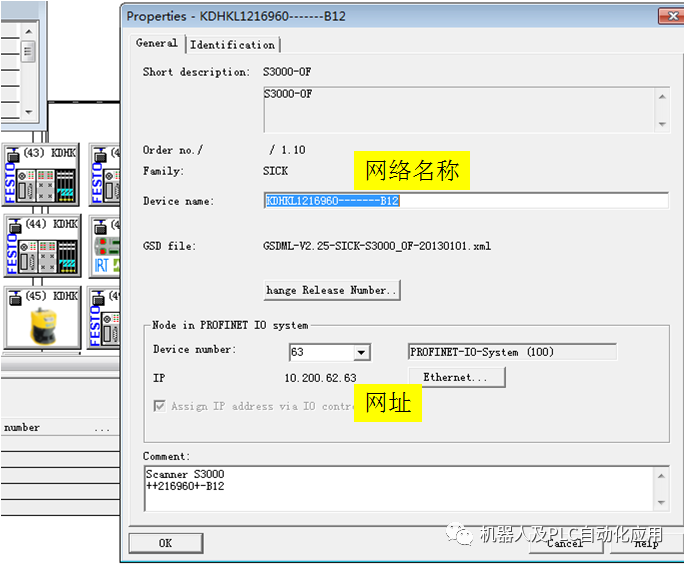
2.設置SICK光電 的網址和網絡名稱。
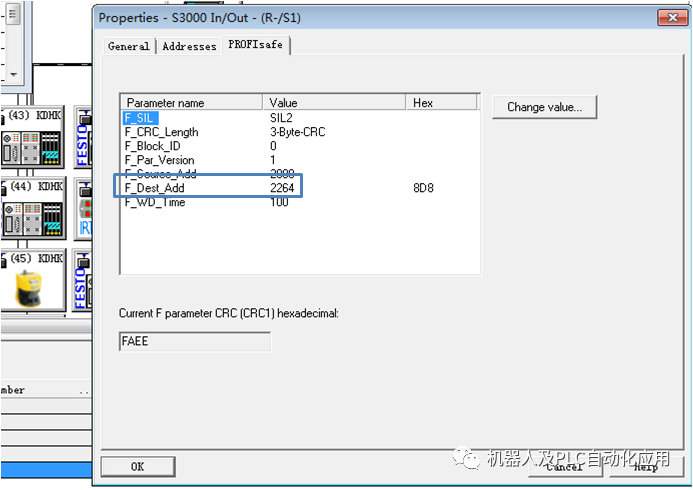
3.設置SICK光電 的安全網址。
門盒里的ET200S的調用IM151-3PN HF
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
機器人
+關注
關注
213文章
29498瀏覽量
211573 -
自動化
+關注
關注
29文章
5745瀏覽量
81642
原文標題:手動工位改自動化,快速添加機器人設計案例分析
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
熱點推薦
機器人和自動化的未來(2)
本文是第二屆電力電子科普征文大賽的獲獎作品,來自西南交通大學黃雯珂的投稿。3機器人與自動化的未來展望隨著機器人和自動化技術的不斷進步,未來的世界將會是

樹莓派在自動化控制項目中的一些潛在應用
自動化控制項目中的一些潛在應用。之前,我們已經為Arduino平臺探討了相同的話題。我們確定Arduino是一個出色的教育工具,但由于一些限

自動化設備裝車機器人給飼料行業帶來哪些優勢
?自動化設備裝車機器人:飼料行業的髙效變革 ?在飼料行業,傳統的裝車作業依賴大量人力,不僅效率低下,還容易出現人為誤差和咹全隱患。隨著科技的發展,自動化

【「具身智能機器人系統」閱讀體驗】2.具身智能機器人的基礎模塊
具身智能機器人的基礎模塊,這個是本書的第二部分內容,主要分為四個部分:機器人計算系統,自主機器人的感知系統,自主機器人的定位系統,自主
發表于 01-04 19:22
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人大模型
需要專業程序員進行繁瑣的編程工作,這種方式不僅效率低下,還限制了機器人的應用場景。例如,在我們大學工程實訓課程中使用的數控機床,需要人為設定起點、終點、移動方向和移動距離等參數,自動化程度非常有限。而
發表于 12-29 23:04
開源項目!OpenCat—— 一個全能的平價四足機器人
以額外承載約 1 千克的重量(但行走速度會變慢)。它面向 STEM教育和創客社區。價格將與一些機器人汽車套件相似。
完整版使用樹莓派來實現更多人工智能增強的感知功能,并指揮一個
發表于 12-16 11:44
愛普生SG-8101CA可編程晶振應用在工業自動化機器人
機器人的卓越表現提供了堅實的支撐。高精度頻率:工業自動化機器人的每一個動作都需要精確到毫米甚至微米級別,這對時鐘信號的精度提出了極高的要求。愛普生SG-8101C

下一代機器人技術:工業自動化的五大趨勢
隨著人工智能(AI)技術的迅猛發展和全球制造業的轉型升級,下一代機器人技術正在引領工業自動化領域的新一輪變革。這些變革不僅深刻影響著生產模式
認識機器人與CW32四足機器人控制項目
: 1. 定義 機器人是具有感知、決策和執行功能的自動化設備。它可以接受外部信息,進行處理,并據此執行一定的動作。 2. 組成 感知系統 :
完美CP,AGV+機械手復合機器人是下一個自動化風口嗎?
隨著中國制造2025、工業4.0等概念的提出,制造業對自動化、智能化生產模式的需求日益增長。傳統生產制造業企業大范圍向工業自動化、工業機器人方向升級

碼垛機器人用途
? ? 碼垛機器人是工業自動化領域的一個重要組成部分,它們在提高生產效率、減少人工成本以及改良工作環境等方面發揮了重要作用。下面是一篇關于碼

降本增效,法奧機器人助力CNC自動化升級提速
工業4.0時代,計算機數控機床(CNC)作為工業自動化的核心設備,其“智造升級”迫在眉睫。 法奧協作機器人,以其易編程、快部署、高安全等特點,助力CNC
工業機器人、PLC與自動化之間的關系
隨著科技的不斷進步和工業領域的快速發展,自動化已成為現代工業生產的重要趨勢。在這一進程中,工業機器人和PLC(可編程邏輯控制器)作為自動化的兩大核心要素,發揮著至關重要的作用。本文將深





 工商網監
工商網監
評論