 庫卡機器人之坐標偏移
庫卡機器人之坐標偏移

一.概要:
已使用過庫卡機器人的老鐵們,應該知道要表示一個機器人的直角坐標系的位置會用到FRAME/POS/E3POS/E6POS類型的數據,其中:
-X/Y/Z:表示直角坐標系直線坐標;
-A/B/C: 表示直角坐標系旋轉坐標;
-S/T : 表示機器人的狀態與轉角;
-E1..E6:表示外部軸的角度;
庫卡的歐拉角Euler-A-B-C對應的是Z->Y->X;
二.歐拉角說明:
1.庫卡機器人坐標轉換的遵循的準則:
- 第一步:X/Y/Z變換(順序無關);
- 第二步:A/B/C變換(先A,再B,最后C);
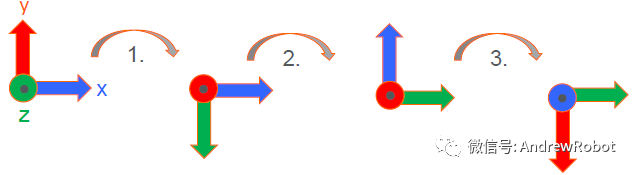
2.案例:
-繞X轉90°,再繞Y轉90°,最后繞Z轉90°:
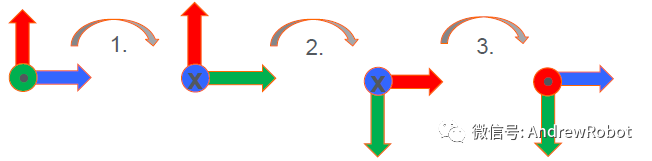
-繞Y轉90°,再繞X轉90°,最后繞Z轉90°:
三.幾何運算符:
用幾何運算符可以以幾何方式相加位置。幾何相加也被稱之為“Frame 運算”。在 KRL 中通過冒號“:” 表示幾何運算符。
1.適用數據類型:FRAME/POS/E6POS類型數據;
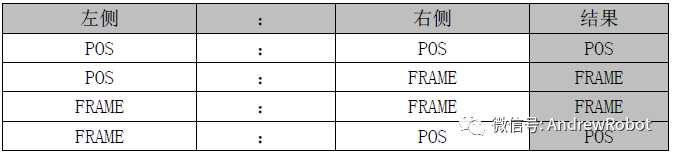
2.兩個運算數的運算:
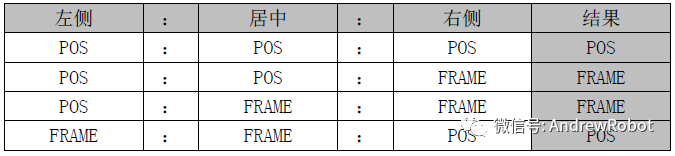
3.三個運算數的運算:
四.應用場景:
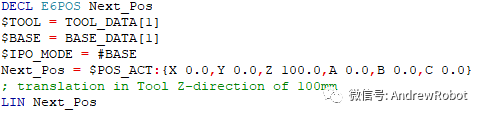
1.機器人基于當前位置沿工具Z向移動100mm:
-傳統:LIN_REL{Z 100}#TOOL
-幾何運算符:
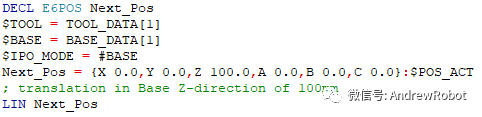
2.機器人基于當前位置沿基座標Z向移動100mm:
-傳統:LIN_REL{Z 100}#BASE
-幾何運算符:
注意:不推薦使用相對運動指令;
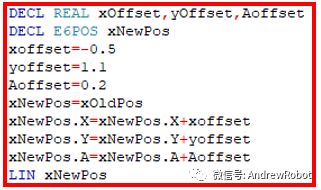
3.視覺相機知會機器人應該沿著基座標X方向偏-0.5,沿著Y方向偏移1.1,沿著A方向旋轉0.2,由于視覺每一次修正值不一定一樣,常規做法:
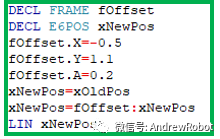
最好的做法是用幾何運算符:
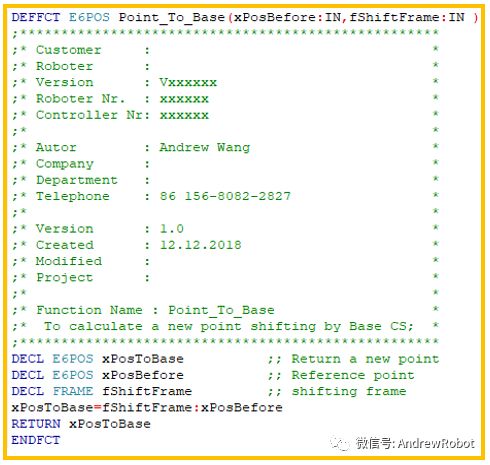
五.擴展(偏移功能)
1.計算點相對基座標CS偏移:
2.計算點相對工具CS偏移:
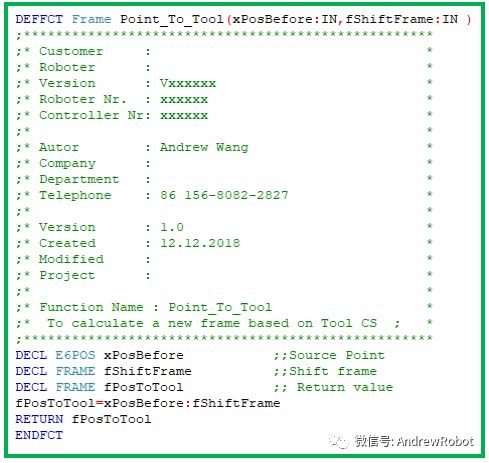
-
機器人
+關注
關注
213文章
29735瀏覽量
212850 -
庫卡
+關注
關注
0文章
83瀏覽量
14469
原文標題:庫卡機器人之坐標偏移
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
當機器人遇上“語言障礙”:CCLINKIE轉Profinet的“破冰外掛”來啦\\!
盤點#機器人開發平臺
【「# ROS 2智能機器人開發實踐」閱讀體驗】機器人入門的引路書
開源項目!基于Arduino控制的六足機器人
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人的基礎模塊
《具身智能機器人系統》第10-13章閱讀心得之具身智能機器人計算挑戰
【「具身智能機器人系統」閱讀體驗】+兩本互為支持的書
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人大模型
如何避免焊接機器人焊縫偏移

節卡機器人發布JAKA MAX系列新品
里程碑!節卡機器人榮膺SGS最新版安全性能認證——國際領先的安全功能認證項目
庫卡機器人獲TüV萊茵北美cTUVus及CE指令符合性證書

世界機器人大會這些趨勢值得關注:機器人邁入中高端應用場景,看節卡機器人如何做?






 工商網監
工商網監
評論