 機器人運動過程等待條件FB SPS的結合BRAKE深入分析
機器人運動過程等待條件FB SPS的結合BRAKE深入分析
機器人的制動
應在出現一個事件后立即停住機器人。
有兩個制動斜坡可供選擇(STOP 1 和 STOP 2)。
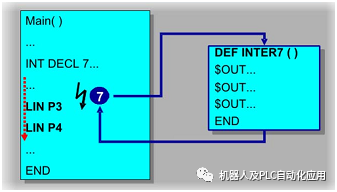
機器人停下時,中斷程序先繼續運行。
中斷程序一結束,已開始的機器人運動就將繼續進行。
句法:
1. BRAKE:STOP 2
2. BRAKE F:STOP 1
BRAKE 只能用于一個中斷程序中。
如果處理中斷例程的時間短于主程序中制定的軌跡規劃,則機器人可不中斷而繼續運行。如果中斷例程所需的時間長于規劃的軌跡,則機器人在其軌跡規劃的終點停下,中斷例程一執行完畢,它將繼續運行。
不允許使用用于初始化 (INI ) 或運動(例如 PTP 或 LIN )的聯機表單。處理時這些表單將引發出錯信息。
機器人被用 BRAKE 停住,中斷例程結束時它將沿著主程序中計劃的軌跡繼續運行。
機器人被用 BRAKE 停住,在中斷例程中運行。中斷例程結束后將繼續沿著主程序中定義的軌跡運行。
例如:

機器人運動過程等待條件FB SPS的結合BRAKE深入分析
DEF FB_CHECK ()
IF $CYCFLAG[254] AND ($TIMER[61]《0)THEN
BRAKE如果有M254 還有T61 就停止移動軌跡-
IF $PRO_MODE《》#BSTEP THEN -程序不是單步-
WAITFOR ($TIMER[61]》0) -等待T61在單步后由-300轉而大于0
ENDIF
ENDIF
$LOOP_CONT=TRUE-循環控制當$LOOP_CONT=False時是開啟了模擬指令-
WAITFOR $CYCFLAG[254] OR ( NOT ($LOOP_CONT) AND ($MODE_OP《》#EX))
等待M 254 –或者在手動時模擬信號-
$LOOP_CONT=TRUE
責任編輯:pj
-
機器人
+關注
關注
213文章
29435瀏覽量
211386 -
模擬信號
+關注
關注
8文章
1158瀏覽量
53260
發布評論請先 登錄





 工商網監
工商網監
評論