 電子發燒友App
電子發燒友App


作者:張一鳴、劉高暢、歐陽蕤
1.1 歷經 200 年技術更迭與產業磨礪,電機逐步走向成熟
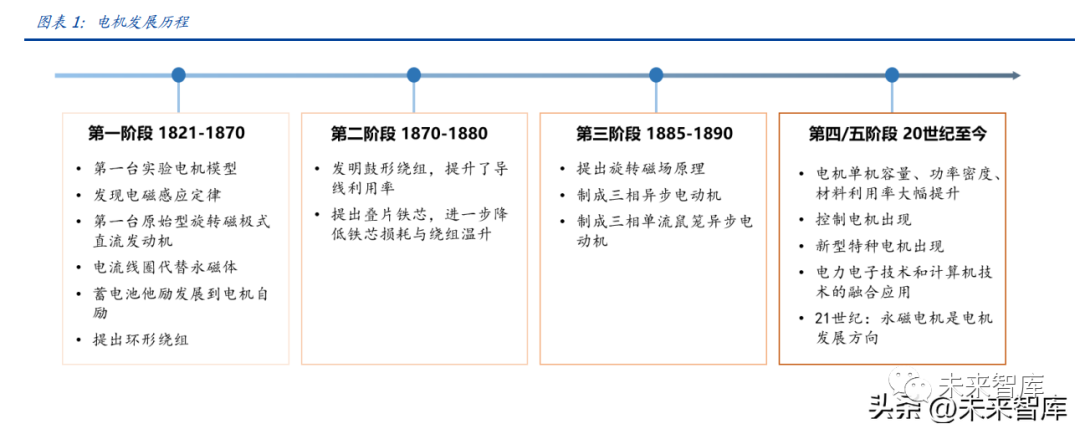
“電機”廣義上來說包括電動機、發動機和原動機等所有可實現電能、機械能相互轉化 的裝臵,但通常情況下所謂電機指的是電動機。電動機也稱馬達,它的作用是將電能轉 化為機械能,產生驅動力矩,作為用電器和機械設備的動力源。電機發展至今已有 200 多年的歷史,其發展歷程可分為以下四個重要階段。
第一階段:基本理論建立,直流電機產生(1821-1870)。1821 年法拉第制成了世界上 第一個實驗電機的模型,并在 1831 年發現了電磁感應定律。1832 年皮克西利用磁鐵和 線圈的相對運動,制成了一臺原始型旋轉磁極式直流發動機,這就是現在直流發電機的 雛形。1834-1870 年期間,發電機領域產生了三項重大發明和改進,即永磁體轉變到電 流線圈、西門子兄弟從蓄電池他勵發展到發電機自勵、格拉姆提出環形繞組,此后發電 機與電動機的可逆原理被廣泛接受,兩者同步發展。
第二階段:直流電機趨于成熟,交流電機開始受到關注(1870-1880)。1873 年,海夫 納阿爾泰涅克發明了鼓形繞組,提高了導線的利用率。1880 年愛迪生提出采用疊片鐵芯, 進一步降低了鐵芯損耗與繞組溫升。鼓形電樞繞組和有槽疊片鐵芯結構一直沿用至今。隨著直流電機的廣泛應用,其固有缺點也很快暴露出來,主要問題在于遠距離輸電、電 機換向存在困難,因此 19 世紀 80 年代后,人們注意力逐漸向交流電機方向轉移。
第三階段:交流電機誕生并不斷向前發展(1885-1890)。1885 年加利萊奧費拉里斯提 出了旋轉磁場原理,并研制出廠二相異步電動機模型,1886 年移居尼古拉〃特斯拉也獨 立地研制出二相異步電動機。1889 年多利沃多勃〃羅沃利斯基制成一臺三相交流單鼠籠 異步電動機,與單相和兩相系統相比,三相系統效率高、用銅少,電機性價比、容量體 積比和材料利用率均有明顯改進。交流電機的研制和發展,特別是三相交流電機的研制 成功為遠距離輸電創造了條件,把電工技術提高到一個新的階段。
第四階段:電機理論和設計、制造技術逐步完善(20 世紀至 21 世紀)。進入 20 世紀, 工業的高速發展不斷對電機提出新的要求,而自動化方面的特殊需要則使控制電機和特 種電機迅速發展。同時,這一時期電機理論不斷豐富,材料和冷卻技術不斷改進,交、 直流電機的單機容量、功率密度與材料利用率都有顯著提高。
第五階段:永磁電機是 21 世紀電機發展方向(21 世紀至今)。進入 21 世紀,專用性、 輕量化、高性能是電機行業發展方向。在專門化的基礎上,專用電機的節電潛能很大。而永磁電機控制性能好,節能且體積小,可通過頻率的變化調速,又容易做成低速直接 驅動等優點,在醫療器械、視聽產品、計算機、數控機床、電動車輛、航空航天產品等 領域得到廣泛應用。同時輕量化需求下,屬于永磁伺服電機中的小功率的空心杯電機等 微型電機開始得到各個行業的重視。
1.2 人形機器人新增電機需求,伺服電機在眾多分類中脫穎而出
電機種類繁多,按用途可分為動力電機和控制電機兩大類,動力電機功率較大,側重于 電機的啟動、運行和制動方面的性能指標,而控制電機輸出功率較小,側重于電機控制 精度和響應速度等指標。動力電機:按運動方式,可分為旋轉電機和直線電機。旋轉電機按電壓性質分為直流電 機與交流電機,其中直流電機按內部有無碳刷可分為有刷電機和無刷電機兩種;交流電 機按結構可分為同步電機和異步電機,按相數不同可分為三相交流電機和單相交流電機。交流電機按其轉子結構不同,還可分為籠型和繞線轉子型,其中籠型三相異步電動機為 應用最廣的動力電機。控制電機:根據控制方法與用途的不同,可分為步進電機、伺服電機、測速電機、力矩 電機(也叫直驅電機)等,其中步進電機是一種電脈沖信號轉換成角位移或者線位移的 電動機,每一個脈沖信號,對應的有一個角度,轉速與脈沖頻率有關。整體看,控制電 機相較于動力電機,增加了控制電路,但電機部分與動力電機并無本質區別,仍可按動 力電機的分類方式進行劃分。
伺服和步進電機是控制電機下的主要產品,其中伺服電機優勢更加明顯。步進電機是一種將電脈沖信號轉換成相應角位移或線位移的電動機,每輸入一個脈沖信號,轉子就轉 動一個角度或前進一步,其輸出的角位移或線位移與輸入的脈沖數成正比,轉速與脈沖 頻率成正比。伺服電機則是一種補助馬達間接變速裝臵,其可以控制速度,位臵精度非 常準確,伺服電機分為直流和交流伺服電動機兩大類,其主要特點是當信號電壓為零時 無自轉現象,轉速隨著轉矩的增加而勻速下降。在數字控制的發展趨勢下,運動控制系 統中大多采用步進電機或全數字式交流伺服電機作為執行電動機。兩者在控制方式上相 似(脈沖和方向信號),但在使用性能和應用場合上存在著差異。步進電機通常為開環控 制,易出現失速或與控制器失去同步的情況。伺服電機為閉環控制,通過實時的閉環信 號反饋來調整,實現更精密的控制。綜合來講,伺服電機在控制精度、低頻特性、過載 能力、速度響應等許多性能方面都優于步進電機,更適用于工業自動化、機器人等領域, 但步進電機具備性價比優勢,在一些要求不高的場合仍可使用。
人形機器人新增更多電機需求,伺服電機和步進電機均具備適配性。特斯拉預計在 9 月 30 日的特斯拉第二個人工智能日(AI Day)發布人形機器人產品,人形機器人有望催生 更大的電機用量需求。從電機用量來看,單臺人型機器人電機用量超 40 個,而對于所 使用的電機產品而言,具備更高控制精度并廣泛使用于工業機器人、通用自動化領域的 伺服電機將是未來人形機器人的主要配臵。此外,對于步進電機而言,其在人形機器人的眼睛部位具備較好適配性,目前現有學術研究和實驗設計中,在機器人仿生眼中使用 步進電機是較為理想和可靠的選擇,因為仿生眼在需要具有人類一樣的視覺功能,并且 體積較小,要求驅動攝像頭的驅動機構具備小體積并能提供各自的兩個自由度運動 (180°),而步進電機可以實現無位臵傳感器的位臵控制,并保證平穩運行,因此在人 形機器人眼部安裝步進電機具備較好適配性。
二、人形機器人大時代來臨,伺服電機需求有望爆發
2.1 伺服電機種類眾多,高效+輕量化+微型化產品是未來發展方向
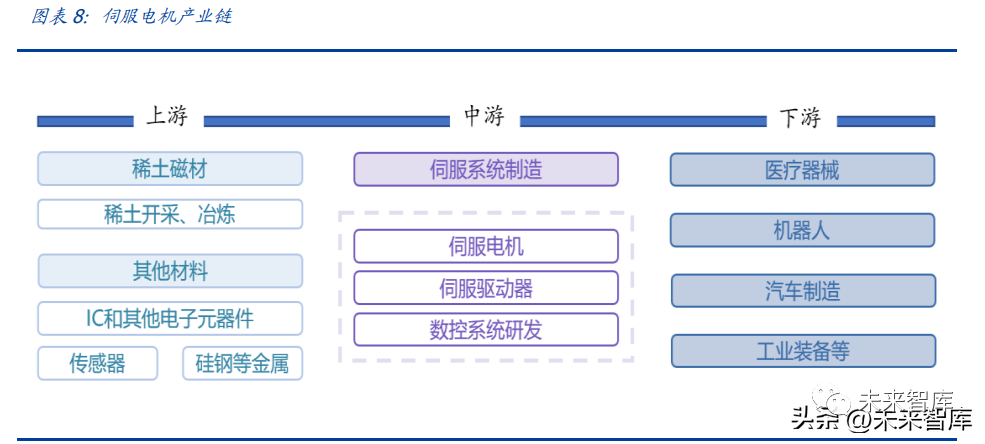
伺服電機產業鏈層次明晰,稀土磁材是必備原材料。伺服電機產業鏈涉及稀土磁材、電 子原器件、伺服系統制造、機器人等,上游來看,伺服電機行業的上游主要是稀土磁材 和電子零部件等其他材料,稀土磁材是伺服電機制造過程中必需的重要原材料。中游來 看,除伺服電機制造以外,伺服系統還包括伺服驅動器制造以及數控系統研發等環節。下游來看,伺服電機可以廣泛應用于醫療器械、機器人制造、汽車制造和工業裝備制造 等領域,具備廣闊的應用前景。
國內伺服電機市場規模近 200 億元,匯川技術引領國產替代浪潮。近看來,我國伺服電 機市場規模穩步增長,根據工控網數據,2021 年我國伺服電機市場約 169 億元, 2017-2021 年 CAGR 約為 10%,受到下游工業機器人、醫療器械、電子制造設備等產業 擴張的影響,伺服電機在新興產業應用規模也不斷增加。從競爭格局上看,匯川技術已 占領國內龍頭地位,根據 MIR DATABANK 的數據顯示,2021 年上半年,國產品牌中, 匯川技術在國內市場份額首次排名第一,市占率達 15.9%,除匯川外,排名靠前的電機 廠商依然以日本和中國臺灣為主,包括日本安川(11.9%)、臺灣臺達(8.9%)、日本松下(8.8%) 和日本三菱(8.3%),行業 CR5 為 53.8%,集中度較高。但從國內其他廠商競爭力角度 看,在匯川引領下,眾多國內電機企業開始奮起直追,包括禾川科技、江蘇雷利、鳴志 電器在內的眾多國內品牌都推出自己成熟的伺服電機產品,并開始在市場上嶄露頭角。
從分類上看,普通伺服電機、舵機和空心杯電機是主要類型。普通的伺服電機主要分為 直流伺服電機和交流伺服電機,其中直流電機是將直流電能轉換為機械能,其按勵磁方 式分為永磁、他勵和自勵 3 類,此外,對于直流電機而言,其還可以按照有無電刷(碳 刷)分為有刷直流伺服電機和無刷直流伺服電機。
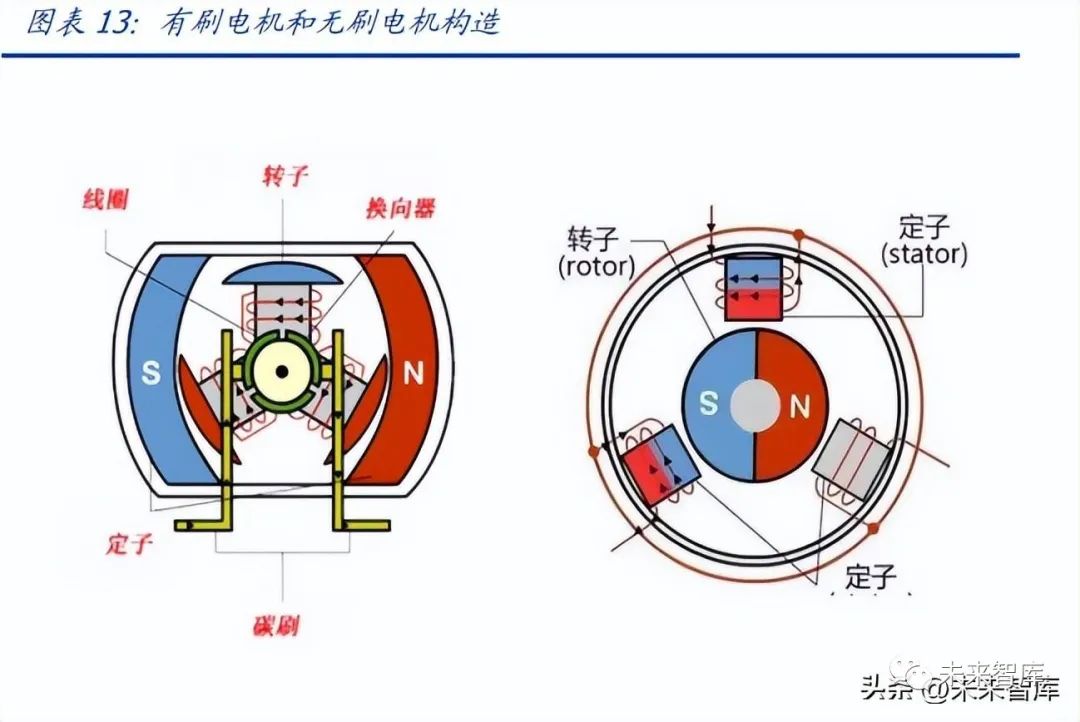
碳刷:碳刷是用于電機的換向器或滑環上,作為導出導入電流的滑動接觸體。其導 電,導熱以及潤滑性能良好,并具有一定的機械強度和換向性火花的本能,幾乎所 有的有刷電機都使用碳刷,它是有刷電機的重要組成部件。根據有無碳刷,直流伺 服電機分為有刷電機和無刷電機,有刷電機成本低,結構簡單,控制容易,需要維 護,但由于維護不方便(換碳刷),產生電磁干擾,為了提高直流電機的使用壽命、運轉穩定性以及降低直流電機的噪聲和電磁干擾,無刷直流電機有逐步取代有刷電 機的趨勢。對于交流伺服電機來說,一般不用恒磁場,所以用不著換向器,也就無 須電刷,故其也是無刷電機一種,分為同步和異步電機。
空心杯電機是直流電機的特殊形式。伺服電機中還存在一種直流永磁的伺服控制電 機,即空心杯電機,其體積較小且效率較高,屬于微特電機的一種。空心杯電動機 由機殼、線圈、后蓋、磁體和換向器組成,線圈看起來像一個水杯,故稱空心杯, 其在結構上突破了傳統電機的轉子結構形式,采用的是無鐵芯轉子,也叫空心杯型 轉子,這種轉子結構徹底消除了由于鐵芯形成渦流而造成的電能損耗,同時其重量 和轉動慣量大幅降低,從而減少了轉子自身的機械能損耗。此外,根據有無電刷, 空心杯電機亦可分為有刷空心杯電機和無刷空心杯電機。
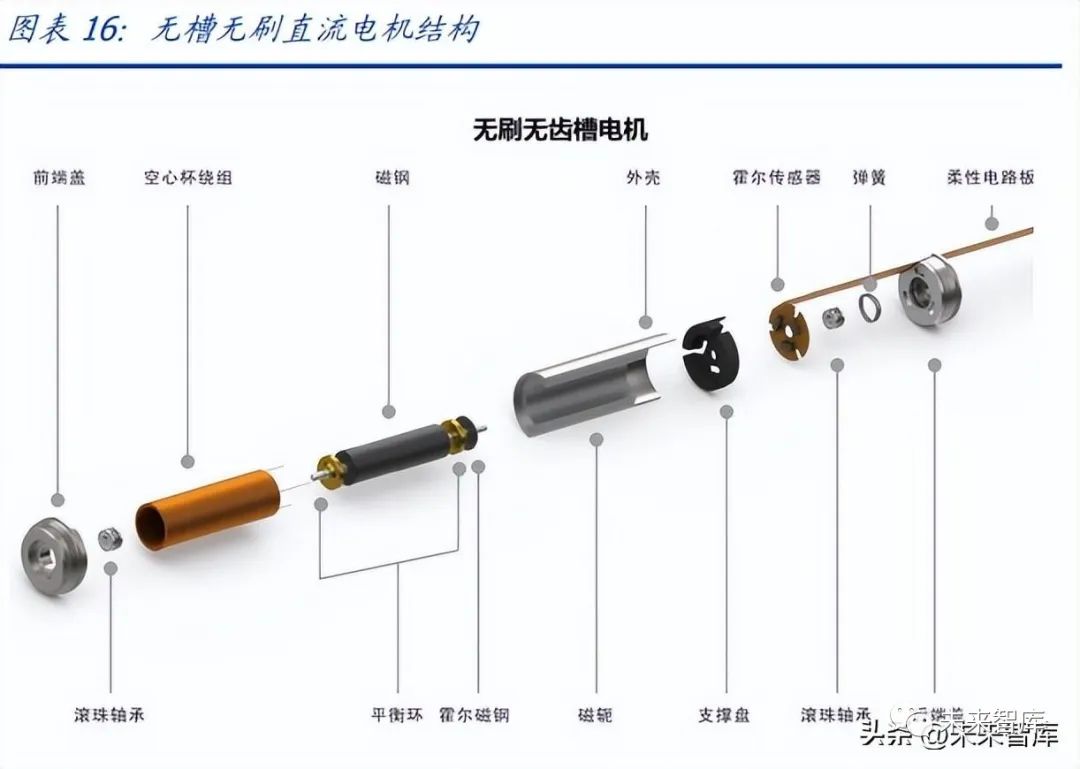
以空心杯電機為代表的新型電機具備高效、輕量化、微型化等特點,其亦是伺服電機的 未來發展方向。在全世界節能環保理念廣泛普及的背景下,高效率環保節能電機變成全 世界電機產業發展規劃的共識,空心杯電機、直流無刷電機、伺服電缸等電機均具備更 高功率密度,符合綠色環保和低碳理念,未來在耗電量大、使用頻率高的家電、機器人 等領域還將逐步滲透。此外,工業機器人、家用電器等設備越來越趨于高效節能化、小 型化及智能化,電機作為執行元器件的重要組成部分,對輕量化、微型化和響應速度的 要求也越來越高。以無槽無刷電機為例,近來年無刷直流電機已越來越多地替代有刷直 流電機,尤其在高速和長使用壽命的應用場景中,而無刷直流電機的鐵芯為了安放電子 繞組,一般采用開槽設計,而鐵芯的齒槽在磁場中會產生齒槽轉矩,造成電機轉矩波動、振動和嗓音,影響電機在速度控制系統中的低速性能和精度。因此無槽設計的無刷直流 電機逐漸被開發出來,與傳統有槽無刷電機相比,其具備體積更小、成本低、功率密度 更高、過載能力更強等多個優點。整體看,我們認為,以空心杯電機、伺服電缸、無槽 無刷電機等為代表的新型電機在技術路徑上正逐步向高效率、輕量化、低成本的方向持 續突破,這種技術導向有望成為一種產業發展趨勢,各類產品也將在在機器人、家電、 汽車等領域進一步加速滲透。
2.2 仿真人形結構帶動伺服電機用量迎來指數級增長
特斯拉 Bot 即將推出,人形機器人帶來更大想象空間。特斯拉預計在 9 月 30 日的特斯 拉第二個人工智能日(AI Day)發布人形機器人產品。這款機器人運用了特斯拉最先進 的 AI 技術,基于特斯拉在自動駕駛領域的技術積累進行開發,被稱為是 2022 年最重要 的產品開發項目,甚至可能比汽車業務更重要。從已公布的參數看,特斯拉人形機器人 主要配臵包括:1)身高 5 尺 8 寸(約 1.73 米);2)頭部帶有顯示屏,用以展示信息;3)采用 Autopilot 的攝像頭作為視覺感知傳感器,共八個攝像頭;4)采用 FSD Computer 作為計算核心;5)脖子、胳膊、手、腿、軀干累計搭載了 40 個機電傳動器;6)搭載 多相機神經網絡、基于神經網絡的規化、自動標記、算法訓練等;7)以輕量材料打造, 最高時速達 5 英里/小時。
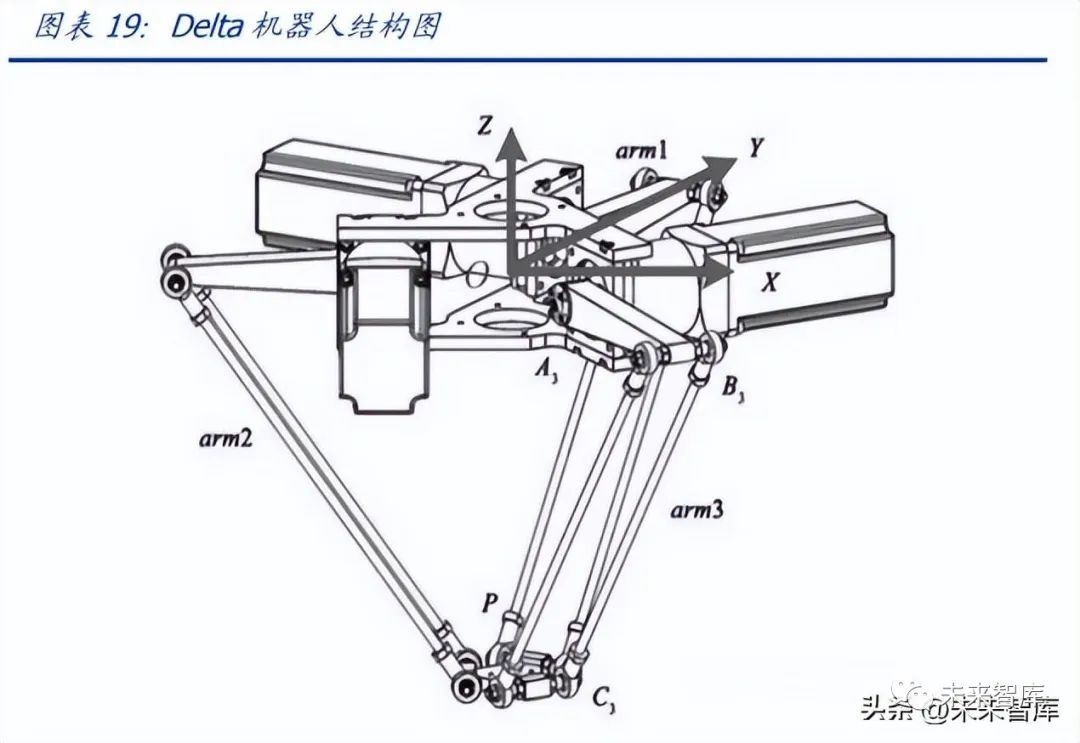
單臺人形機器人電機用量超 40 個,較傳統工業機器人的電機用量大幅增長。從傳統工 業機器人看,其可以分為多關節、SCARA、delta、協作機器人幾大類,我們按照其各自 的自由度(關節數量)進行細分,多關節機器人和協作機器人多以六軸為主,單臺六軸 機器人的六個自由度對應 6 臺電機需求,SCARA 機器人擁有三個互相平行的旋轉軸和一 個線性軸,故 4 個自由度對應 4 臺電機,delta 機器人為并聯結構,由三條從動臂組成, 對應 3 臺電機,同時在旋轉末端執行器位臵配備第四臺電機,目前新一代的 Delta 機器 人一般是用直驅力矩電機取代伺服電機的設計,但數量上看單臺機器人電機用量仍為 4 個。而特斯拉 Optimus 將搭載約 40 個電機,實現對頸部、手臂、手指、軀干、腿部等 部位的控制,電機數量較傳統工業機械人和服務機器人有大幅提升。
工業機器人:伺服電機用量需求保持穩定增長。根據 MIR 數據,2021 年我國工業 機器人銷量為 25.7 萬臺,其中多關節/SCARA/delta/協作機器人占比分別為 61.9%/29.1%/6.0%/3.0%。假設各類機器人銷量占比保持基本穩定,預計 2025 年 我國工業機器人銷量有望突破 45 萬臺。同時,我們做出如下假設:1)假設多關節 機器人和協作機器人均為六軸機器人;2)delta 機器人均采用伺服電機而非新一代 的力矩電機;3)按照多關節/SCARA/delta/協作機器人的單臺伺服電機用量 6/4/4/6 臺進行計算。在此假設下,預計 2025 年我國工業機器人電機用量有望超過 240 萬 臺,整體需求保持穩定向上增長。
人形機器人:伺服電機需求量呈指數級增長,產業鏈迎來黃金時代。人形機器人關 節預計在 40 個以上,我們按照 40 個關節數量計算,對應 40 臺電機用量,包括頸 部、手臂、手指、軀干、腿部等各個部位,我們在人形機器人銷量達到 100 萬臺的 中性假設下,預計對應人形機器人電機用量達到 4000 萬臺,較傳統工業機器人電 機需求量大幅增長。考慮到不同部位配臵的電機功率、大小存在差異,其價格也存 在差異,我們假設單臺電機均價 1200 元,則單臺人形機器人電機價值量有望達到 4.8 萬元,按 100 萬臺銷量計算,人形機器人有望帶來 480 億的增量市場空間。
2.3 人形機器人手指關節自由度提升,空心杯電機具備較強契合度
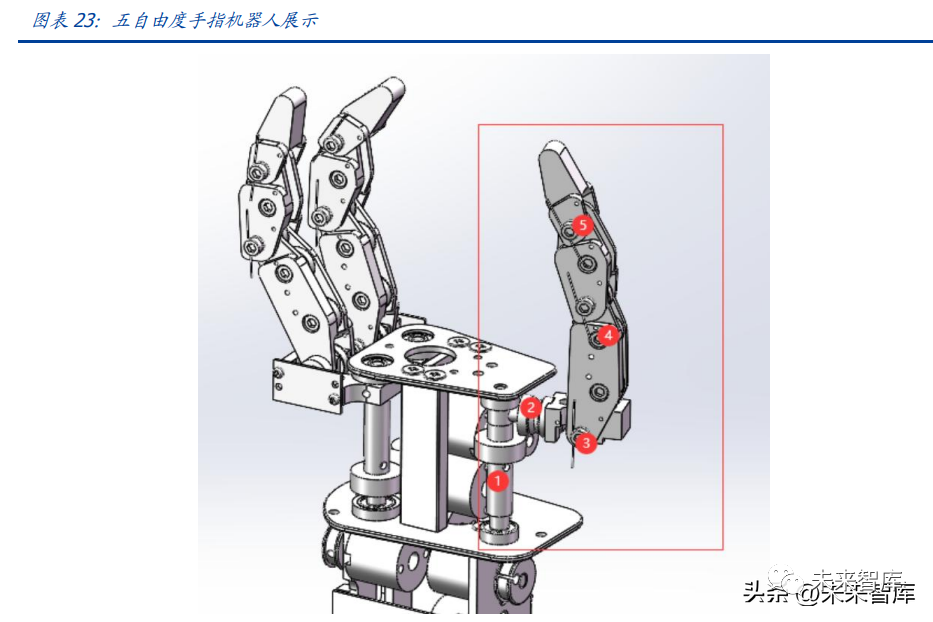
更加靈活的應用場景驅動下人形機器人手指應具備更高的自由度。人形機器人的重點在 于替代人的部分工作場景,同時進行更好的交互以輔助人進行工作,因此其會面臨更加 多樣化、更加復雜的應用場景,故賦予其手指關節更高自由度使得其具備抓取、傳遞等 基本功能是關鍵。考慮到人形機器人的仿真性,其手指關節處需要配備體積小且能輸出 較大力的電機。我們認為,具備節能、靈敏且體積較小的空心杯電機和將伺服電機與絲 杠集成的模塊化產品電缸,天然適配于人形機器人手指關節。
空心杯電機:優點明顯,與人形機器人完美適配。空心杯電動機屬于微型直流永磁 伺服電動機,它可以利用永磁鐵產生磁場,從而實現直流供電。與傳統電機的不同 之處在于,空心杯電機結構為轉子無鐵芯,轉子無鐵芯的結構設計一是可以降低電 機質量,二是可以降低電機的機械損耗,便于延長電機壽命,從根本上杜絕了因鐵 芯而產生的鐵耗,提升效率。空心杯電機可以分為無刷空心杯電機和有刷空心杯電 機,作為高效率的能量轉換裝臵,優點明顯:1)節能性:能量轉換效率高,其最大 效率一般在 70%以上;2)控制特性:起動、制動迅速,響應極快,在高速運轉狀 態下,可以方便地對轉速進行靈敏的調節;3)運行穩定且十分可靠,轉速波動很小, 能夠容易的控制在 2%以內;4)重量輕,體積小:空心杯電動機的能量密度大幅度 提高,與同等功率的鐵芯電動機相比,其重量、體積減輕超過三分之一。由于空心杯電動機克服了有鐵芯電動機不可逾越的技術障礙,其在軍事、各類工業產品、高 科技、民用電器等各領域應用廣泛。而對工業機器人、仿生義肢等,空心杯電機憑 借其快速響應的隨動系統能夠很好發揮作用。對于人形機器人而言,空心杯電機除 快速響應外,體積小、重量輕、節能等各種特點都符合人形機器人需要,隨著人形 機器人大時代來臨,空心杯電機有望迎來需求爆發。
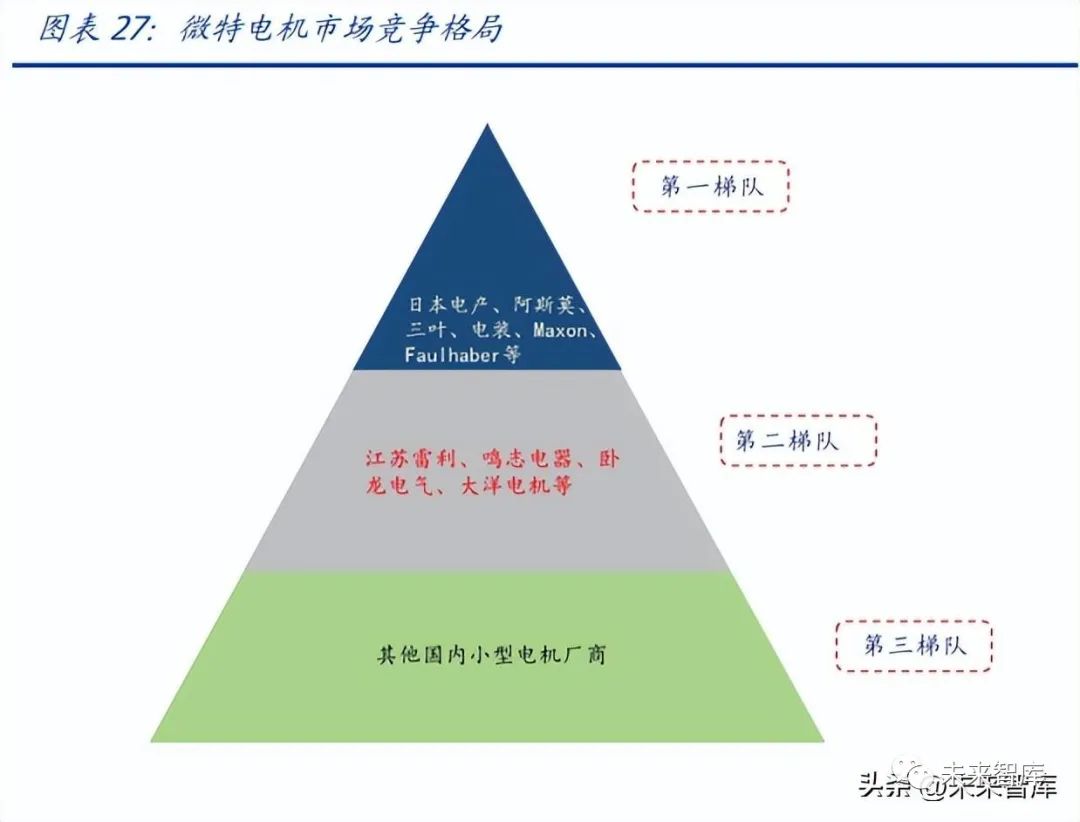
海外品牌占據高端市場,國內產品性價比優勢明顯。由于空心杯電機屬于微特電機 的一種,而微特電機屬于技術密集行業,其興起于瑞士,發展于日本,而后隨技術 擴散逐步向發展中國家轉移,因此我國的空心杯電機產品較國外還存在一定差距。從微特電機的下游看,信息處理、家用電器和武器、航空等領域占據主要份額,而 目前在 IT 微特電機領域,日本企業相對領先,其中硬盤主軸電機是技術含量較高 的微電機,Nidec(電產)、inebea(美蓓亞)都是代表廠商,手機用線性震動電機 僅 SEMCO(三星電機)等少數企業可以供貨。在汽車微特電機領域,同樣是日本 企業主導市場,Nidec(電產)、ASMO(阿斯莫)、Mitsuba (三葉)、Denso(電裝) 占據主要市場份額,空心杯電機作為電機的新的發展方向,國外廠商也紛紛加強產 品布局,如 Maxon(瑞士)、Faulhaber(德國)等著名微電機廠商都已經大量申請 空心杯電機相關的專利技術。目前,國內廠商在微特電機,尤其是空心杯電機領域 開始奮起直追,不斷加速國產替代,從價格上看,國內廠商微特電機產品價格在幾 百元不等,且性能上開始逐步收斂國外同類型產品,性價比優勢凸顯。
人形機器人有望帶動空心杯電機用量大幅增長。考慮到空心杯電機體積較小,更易 于裝配在機器人小關節處,保守假設下,我們假設空心杯電機僅用在人形機器人手 指關節處,且僅考慮三根手指裝配空心杯電機(一只手臂),則單臺機器人所需空心 杯電機數量為 6 臺,中性假設人形機器人銷量達到 100 萬臺,對應空心杯電機需求 量為 600 萬臺。
2.4 伺服電缸符合人形機器人降能耗目標,產品需求有望持續推升
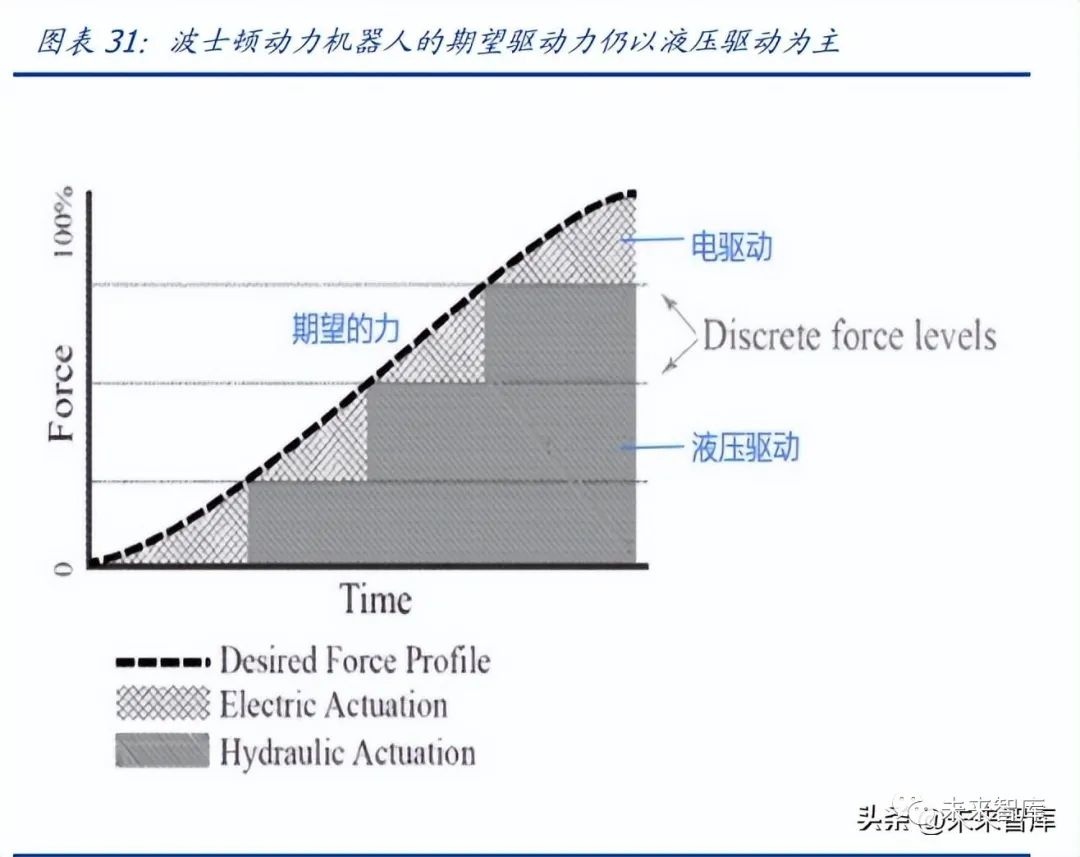
動力問題是機器人的核心問題,波士頓動力采用液壓執行器進行輔助驅動。波士頓動力 早期機器人主要是電機通過齒輪驅動連桿機構,對于沒有載荷要求的機器人而言足夠, 但 BigDog 這類以內燃機為動力且需搭載較大負荷的機器人產品系統能耗高,能量的多 次轉換、多環節傳遞造成了大能量損失,原有設計方案無法滿足。為了提高機器人運行 的效率、減小功率消耗以及提高運動穩健性,波士頓動力通過判斷關節承受的載荷類型 和大小,以選擇適當的液壓或電動制動器,使得機器人的功率消耗最低。但從其動力來 源看,最主要依靠的驅動方式仍為液壓驅動,在腿部上肢和下肢的連接處采取的多以液 壓執行器為主,相比于純電動執行器,在降功耗、提效率上仍存在一定不足。
伺服電缸:有望替代液壓執行器,完美符合人形機器人產品需求導向。伺服電缸是 將伺服電機與絲杠一體化設計的模塊化產品,將伺服電機的旋轉運動轉換成直線運 動。伺服電缸通過結構上的改造將伺服電機自身優勢轉變成精確速度控制,精確位 臵控制和精確推力控制,從而實現高精度直線運動。從優點上看,伺服電缸能夠快 速與 PLC 等控制系統連接,實現高精密運動控制,同時具備噪音低,節能,干凈, 高剛性,抗沖擊力,超長壽命,操作維護簡單等優勢,并且可以適應在惡劣環境下 的工作,廣泛適用于造紙行業,化工行業,汽車行業,電子行業,機械自動化行業, 焊接行業等各領域。對于人形機器人而言,伺服電缸的節能、輕量化特點相比于液 壓驅動具備較好的優勢,符合特斯拉本身的電動化導向,也符合人形機器人產品未 來的要求。
伺服電缸契合人形機器人未來多方位的應用場景,需求量有望隨之提升。伺服電缸 高精密運動控制的特點符合人形機器人的要求,同時低噪、節能、高剛性以及能夠 適應惡劣環境工作的特點符合當前用戶端對人形機器人應用場景的期望。從產品適 配上看,伺服電缸主要針對人形機器人膝關節、肘關節和肩關節的連接處,起到輔 助驅動的作用,使用伺服電缸相比于采用液壓執行器,在控制成本的同時,也能夠 降低機器人的重量,降低耗電量。我們按照保守情況做出預測,假設伺服電缸僅用 在人形機器人膝關節、肘關節和肩關節三處使用,則單臺機器人所需伺服電缸數量 為 6 臺,中性假設人形機器人銷量達到 100 萬臺,對應空心杯電機需求量為 600 萬 臺。
三、重點公司分析
3.1 江蘇雷利:中高端微特電機領軍企業
公司是全球家用微特電機領軍企業,通過外延并購切入醫療器械、新能源汽車零部件、 工控等高景氣賽道,打開新的成長空間。通過橫向拓展應用領域,公司 2021 年實現收 入 29.2 億元,同比增長 20.5%,收入增速邊際改善。公司經過多年經營,已成為全球 知名的微特電機供應商。公司借鑒海外龍頭經驗,通過并購等方式切入醫療器械、新能 源、工控等高端應用場景。2021 年公司“多應用領域”戰略成效顯著,實現了工控市場 的重大突破,同時新能源、醫療器械領域也取得快速增長,實現營業收入 29.2 億元,同 比增長 20.5%,收入增速邊際改善。

家用電機為基本盤,工控、醫療、新能源等高毛利產品快速放量。公司基本盤為家用電 機及組件,包括空調、冰箱、洗衣機等電機和組件,2021 年家用電機及組件(空調+冰 箱+洗衣機)收入為 16.4 億元,占總收入比重 64.0%。工控產品主要為絲桿電機、無刷 電機及組件,主要應用于工業設備的閥門電機等,2021 年實現收入 2.95 億元,同比增 長 60%。汽車零部件主要為汽車水泵、汽車電機及沖壓件,醫療及運動健康電機及組件 主要為絲桿電機、跑步機電機及組件。從毛利率來看,工控、醫療等產品相較于傳統家 電產品毛利率更高,有利于公司產品結構優化。
3.2 鳴志電器:混合式步進電機龍頭,加碼無刷電機打造解決方案供應商
公司是全球領先的電機及驅動系統制造商,在步入電機、伺服系統、無刷電機、空心杯 電機及驅動系統等方面實現了深入布局。其中混合式步進電機產品在全球市場一直享有 較高的市場地位,占據全球 10%以上市場份額,打破了日本企業對混合式步進電機的壟 斷。從股權結構看,公司實控人為常建鳴先生,持有鳴志投資 90%股權,目前公司已形 成了以控制電機、驅動控制系統為核心,貿易代理及工業互聯網等業務協同發展的業務 架構,其中鳴志國貿和鳴志美洲控股等核心子公司加速了公司全球范圍內的業務布局。
業績穩定增長,2021 年增長提速。公司深耕運動控制領域二十余年,業績增長穩健, 2017-2020 年營業收入 CAGR 為 10.8%,歸母凈利潤 CAGR 為 6.6%。2021 年公司布局 的工廠自動化、醫療器械、生化分析、移動服務機器人等新興、高附加值領域業務成效 顯著,通用自動化、驅動控制系統類業務也取得快速成長,實現營業收入 27.1 億元,同 比增長 22.7%;實現凈母凈利潤 2.8 億元,同比增長 39.3%。2022 年以來受疫情影響, 業績增速有所下滑。
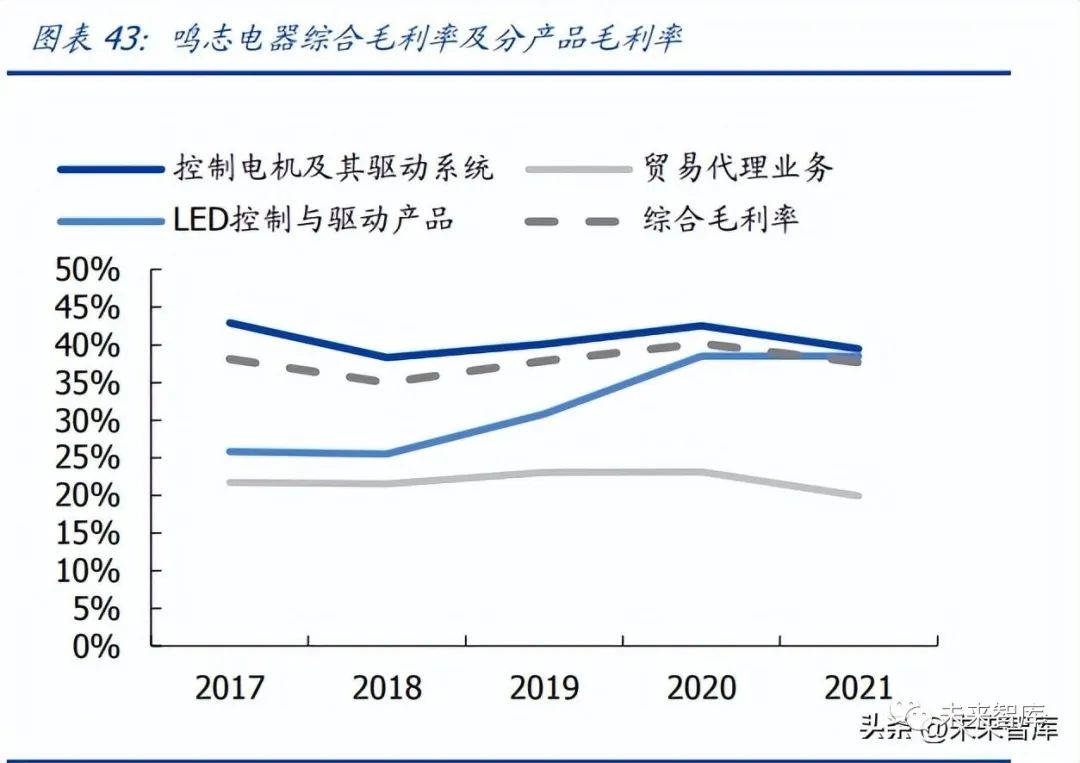
加碼無刷電機,公司著力打造電機與絲杠一體化設計的模塊化產品,優勢明顯。2020 年,公司通過變更募集資金投資約 0.62 億元設立“無刷電機的新增產能項目”,項目達 產后將形成新增年產 227 萬臺高標準無刷電機的生產能力,預計將為公司新增營業收入 約 2.5 億元/年。2021 年公司無刷電機業務實現營收 1.1 億元,同比增長 81.5%,主要 源于產能的穩步提升以及得益于在移動服務機器人、高端醫療儀器等應用領域的增長。此外,公司自 2015 年開始組建精密直線傳動系統業務,專注于打造電機與絲杠一體化 設計的模塊化產品,目前公司精密直線傳動系統業務聚焦重點行業,努力擴大存量市場 份額,通過持續完善平臺化產品在增量市場上獲得競爭優勢,2021 年公司精密直線傳動 系統業務實現營業收入 7310 萬元,較上年同期增長 73.6%。整體看,公司“運動控制 器+電機驅動器+控制電機+精密直線傳動系統”的組合形成了完整的運動控制業務系統, 標志著公司在自動化領域真正向解決方案級供應商的目標邁進。
編輯:黃飛




















 工商網監
工商網監
評論