 如何精準分析人形機器人運動數據?
如何精準分析人形機器人運動數據?
全球“機器換人”進程加速,人形機器人有望成為AI下一個重要落地應用場景;EtherCAT-Analyzer具備分析人形機器人所有關節和電池與主站的通訊信息,快速掌握節點網絡狀態!
前言
隨著人形機器人行業的發展及《中國制造2025》的全面實施,傳統的脈沖模式控制很大程度上制約了機器人的性能,相反,高速工業現場總線EtherCAT利用以太網協議完成工業自動化控制,滿足了工業控制工程中通信穩定、大數據量,低延時性的要求,成為機器人主力發展的總線解決方案,且其易于與現場其它設備組網,為實現自動化流水線及建立智能工廠提供了基礎。
人形機器人關節作為EtherCAT從站,通過主站控制器輕松完成通信控制。但是,主從通訊過程中經常出現的通訊丟幀、延遲和斷開連接等多種問題,嚴重影響工程師們對于機器人的調試與控制,此時迫切需要專業的分析設備快速定位問題點,“對癥下藥”,解決問題。
致遠電子EtherCAT分析儀EtherCAT-Analyzer應運而生,其具有網絡幀統計(流量、轉發延時、錯誤幀、周期抖動)、網絡幀時間分析、網絡幀內容分析、GPIO事件分析以及幀數據存儲等功能,可快速分析評估人形機器人網絡狀態,給與“良藥”快速解決問題。
wireshark解析協議
定位主從通訊問題
上位機連接上EtherCAT分析儀,軟件映射虛擬網卡,輕松查看主從初始化交互信息,獲取從站配置參數,掌握各廠家協議差異,解決適配難題;還可通過實時拓撲,判斷是否為“設備丟幀”、“設備不處理數據”、“設備斷開連接”等問題。
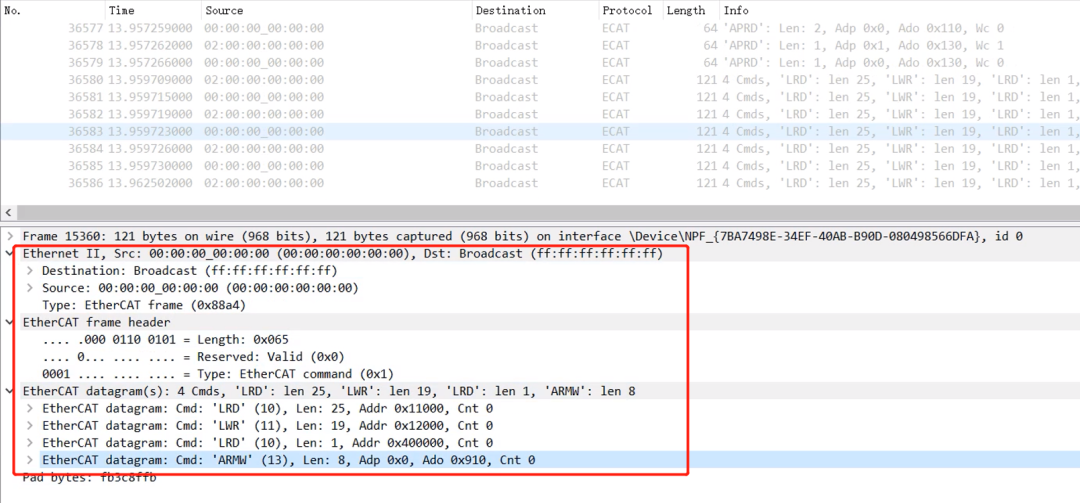
解析協議
定位主從通訊問題
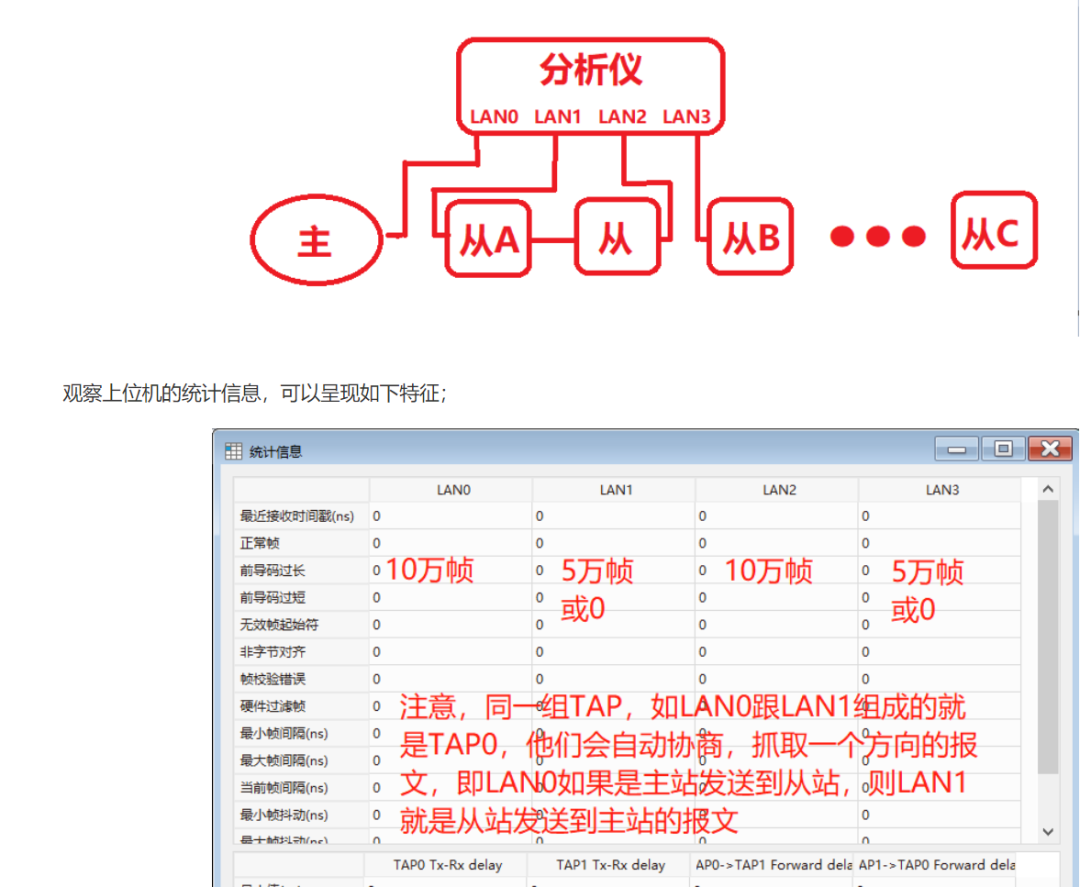
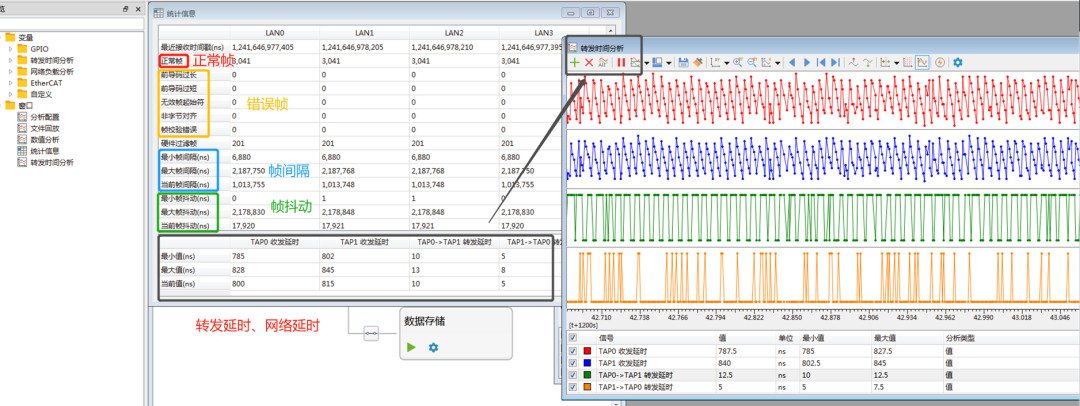
全面統計
便于診斷
上位機連接上EtherCAT分析儀,支持查看四個端口的正常幀、錯誤幀、幀間隔、幀抖動、轉發延時、網絡延時等統計信息。
支持GPIO事件捕獲
滿足網絡同步分析需求
設備支持GPIO事件監控、抓取從站DC中斷信號,從而調整合適的偏移時間。
<1ns的轉發延遲
精準評估主站周期
EtherCAT分析儀支持四個端口的幀轉發時間分析,在多節點的EtherCAT網絡中,不影響實際通信,精準分析主站實際PDO周期與抖動。
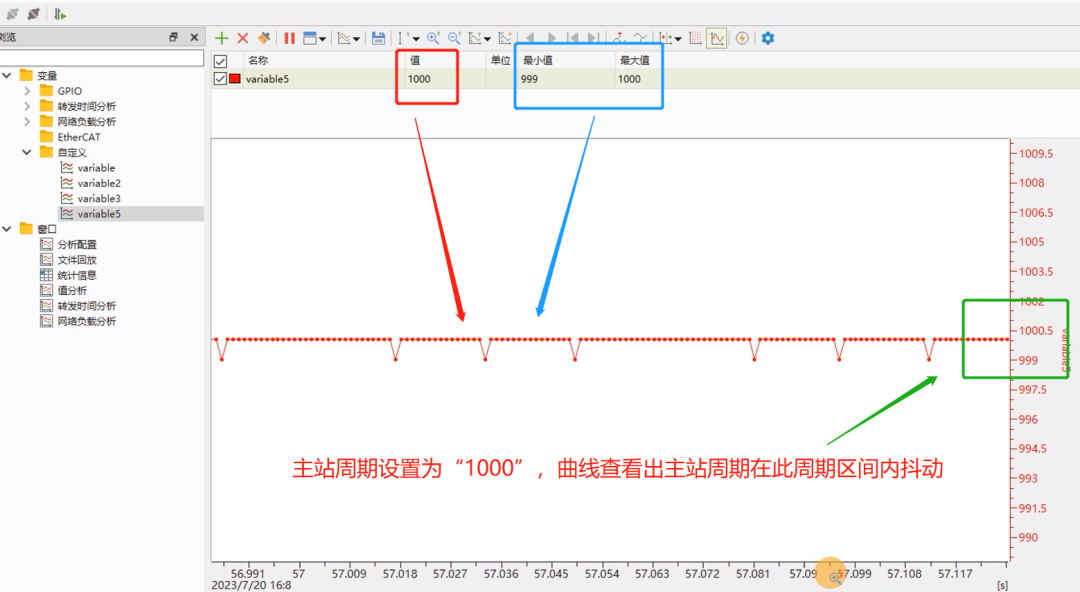
分析PDO周期
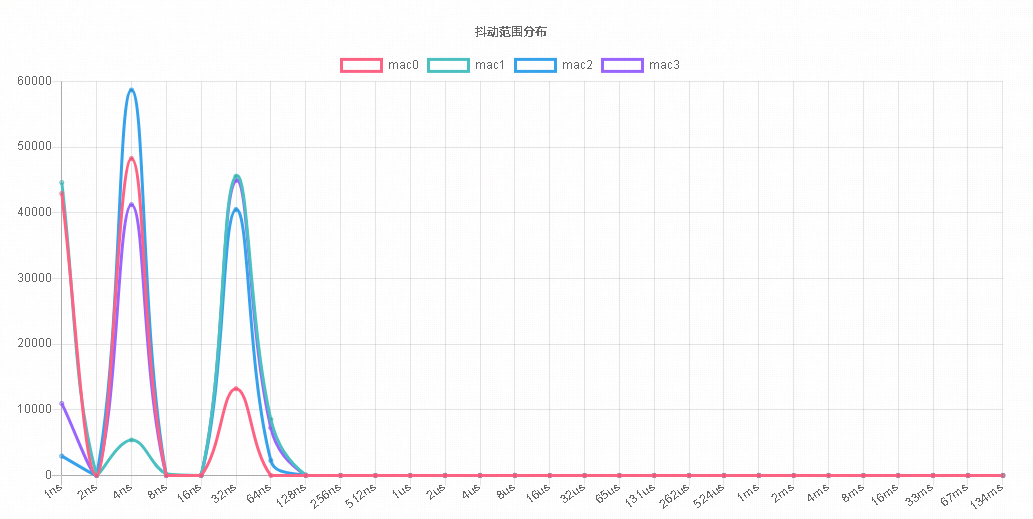
抖動分析
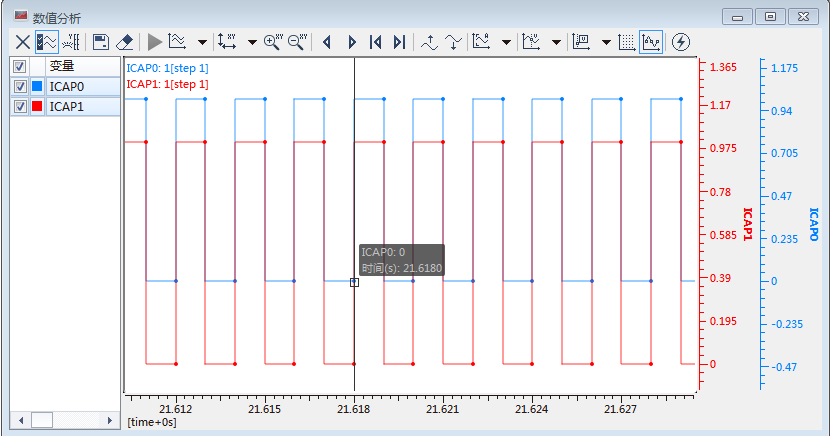
直觀的數值曲線
輕松判斷從站執行效率
EtherCAT分析儀支持幀內數值曲線分析,支持按幀偏移和任意擴展協議解析數值,人形機器人各關節電機和算法的跟隨曲線分析,找到機械或算法性能瓶頸。
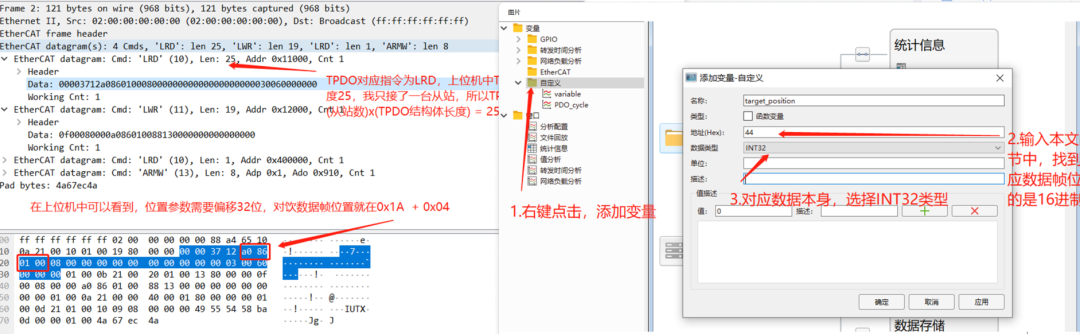
Wireshark確認PDO,上位機添加變量
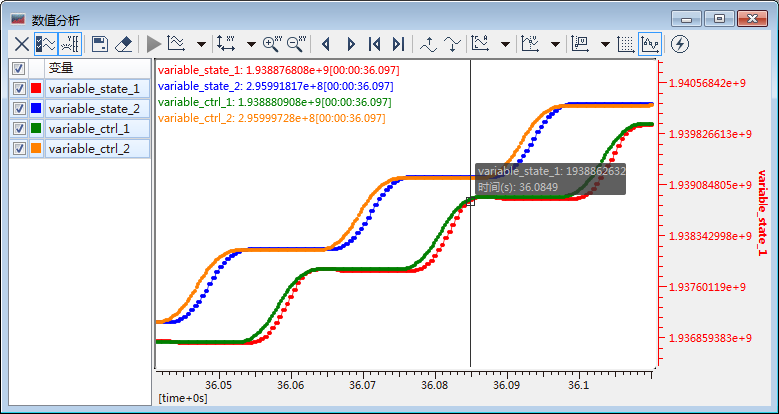
上位機顯示曲線
(主從站輸出曲線貼合度越高,從站執行效率越高)
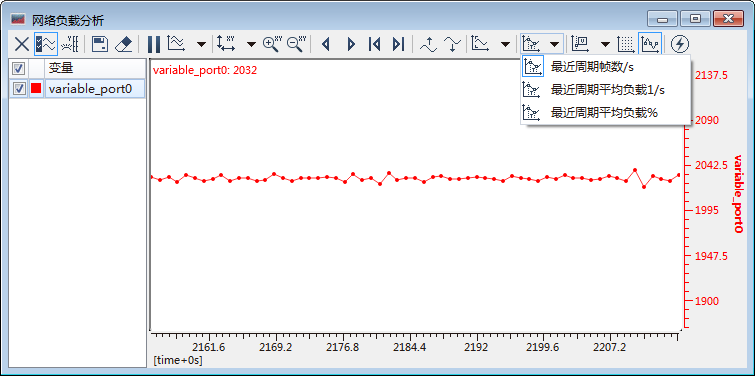
網絡負載監測
實時掌握節點幀流量
EtherCAT分析儀支持對指定數據源進行網絡負載分析,同時支持設置過濾,可針對某個PDO進行幀流量分析。
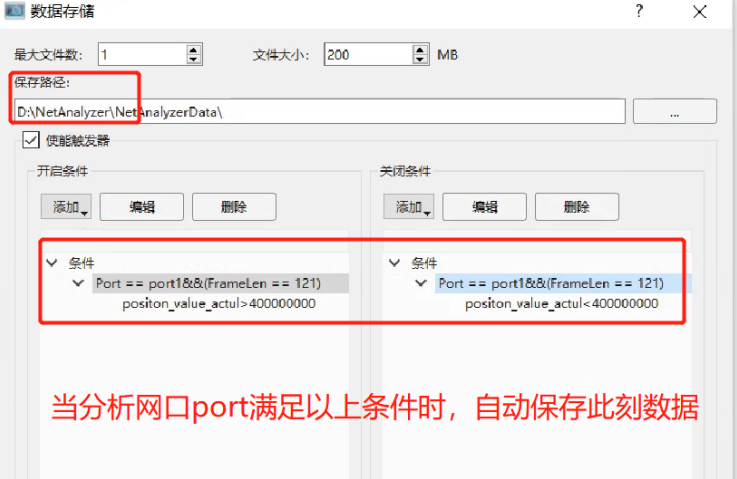
觸發保存
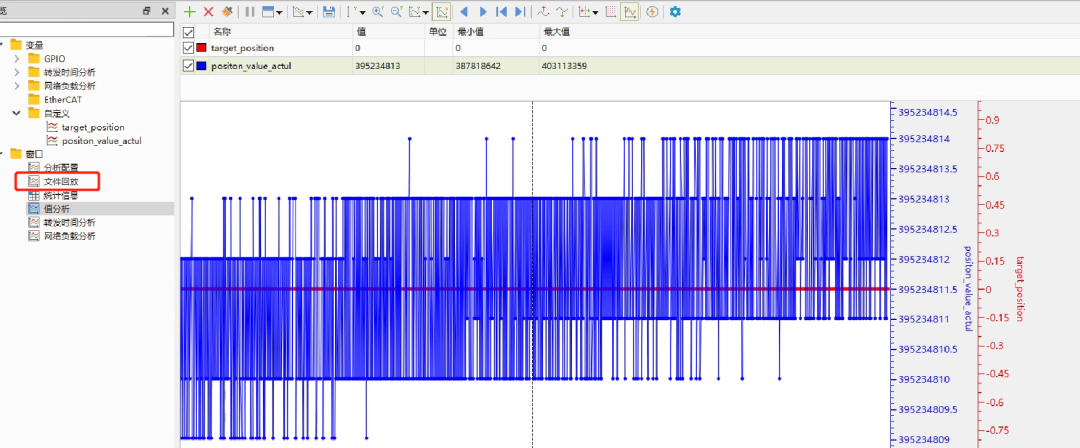
數據回放
上位機配置觸發條件,達到相應條件時候,上位機自動保存相關數據至相關路徑;過后支持將保存的數據通過上位機重新回放分析。
觸發保存
數據回放
搭配ZWS物聯網云平臺
快速實現系統智能化升級
基于致遠電子自主研發的ZWS物聯網云平臺,可以幫您的系統實現智能化升級,支持遠程固件升級、日志文件快速召回、業務數據監控、組態可視化呈現、海量數據分析等功能。
-
機器人
+關注
關注
212文章
29385瀏覽量
211225 -
以太網
+關注
關注
40文章
5568瀏覽量
174527 -
數據
+關注
關注
8文章
7234瀏覽量
90887 -
總線
+關注
關注
10文章
2939瀏覽量
89272
發布評論請先 登錄
人形機器人“造車”,車企扎堆布局!

NVIDIA 通過云端至機器人計算平臺驅動人形機器人技術,賦能物理 AI

破解數據與泛化難題,通用人形機器人研發全面提速

借助OpenUSD與合成數據推動人形機器人發展
EtherCAT科普系列(4):EtherCAT技術在人形機器人靈巧手領域應用

基于IMX219和IWR6843ISK的人形機器人毫米波雷達感應和傳感器融合

GaN FET在人形機器人中的應用

伺服電動缸在人形機器人中的應用
全國首個異構人形機器人訓練場啟用
《人形機器人產業地圖(2024)》重磅發布!

人形機器人控制器之MCU、DSP、AI芯片

從市場角度簡要解讀“人形機器人”






 工商網監
工商網監
評論