 抓取機器人為什么都采用伺服電機?
抓取機器人為什么都采用伺服電機?
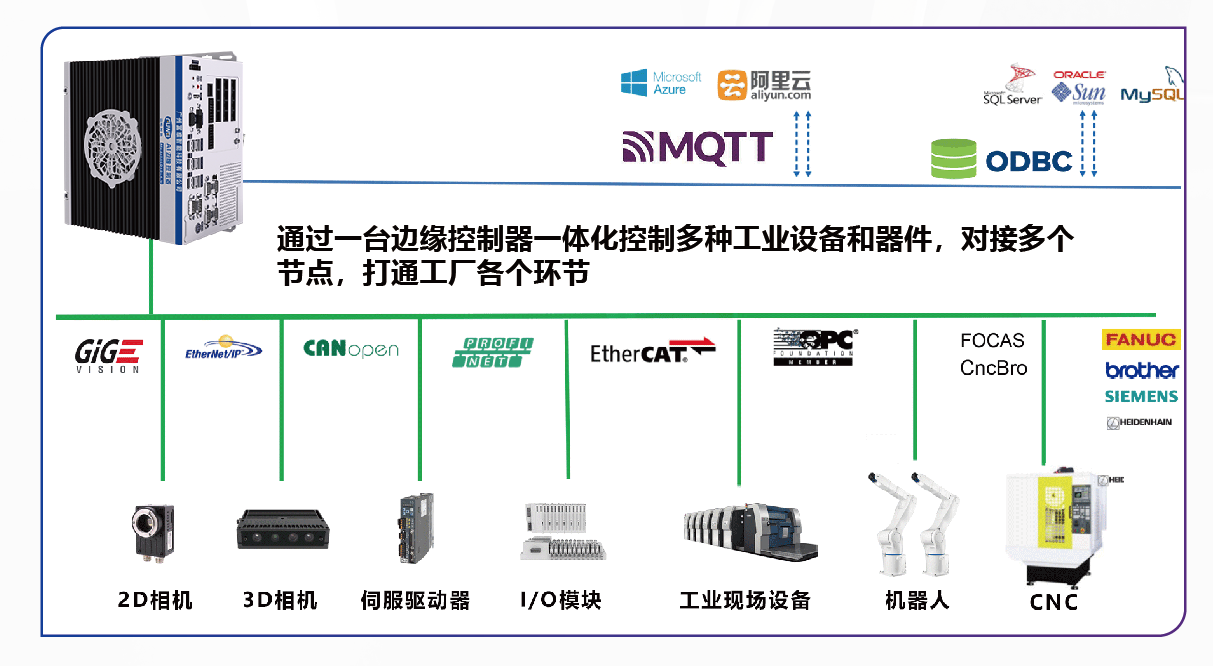
抓取機器人需要對物體進行高精度、高速度的抓取和放置,因此需要使用高性能的伺服電機來實現精準的運動控制。相比于其他類型的電機,伺服電機具有以下優點,適合應用于抓取機器人中:
1、伺服電機可以實現高精度的位置和速度控制,可以確保機械臂在抓取和放置物體時的精準度。
2、伺服電機具有快速響應的特點,可以實現高速度的運動控制,提高機械臂的抓取和放置效率。
3、伺服電機具有平穩的轉矩輸出特性,可以保證機械臂在運行過程中的平穩性和穩定性,避免因為慣性等原因導致的震動和損壞。
4、伺服電機通常配備編碼器等位置反饋裝置,可以實時監測機械臂的位置和狀態,并通過反饋信號進行精確控制,提高機械臂的抓取和放置精度和穩定性。
5、伺服電機可以通過編程實現多種運動模式和控制策略,可以根據不同的抓取需求進行靈活的控制和調整。
為了滿足大家對于抓取機器人用伺服的需要,我們開發了一體式的永磁同步交流伺服,歡迎加微信18309815706咨詢。
晚上我們“廣成工控”直播間也會聊相關內容,歡迎觀看。

原文標題:抓取機器人為什么都采用伺服電機?
文章出處:【微信公眾號:廣成工控】歡迎添加關注!文章轉載請注明出處。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
廣成科技
+關注
關注
0文章
265瀏覽量
562
原文標題:抓取機器人為什么都采用伺服電機?
文章出處:【微信號:gccanzx,微信公眾號:廣成工控】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
熱點推薦
智能投遞機器人為什么采用鋁型材質?揭秘輕量化時代的效率革命
智能投遞機器人為什么采用鋁型材質?答案不僅是技術選擇,更是對效率、靈活性與可持續未來的深度洞察。富唯智能以鋁為翼,賦能機器人突破物理邊界,讓每一次投遞都成為智能制造的創新注腳。
復合機器人抓取精度的影響因素及提升策略
復合機器人結合了移動機器人(如AGV)和機械臂的功能,廣泛應用于物流、制造等領域。抓取精度是其核心性能指標之一,直接影響作業效率和產品質量。本文將探討復合機器人
從機器人到半導體設備:哈默納科HMA中空伺服交流電機如何解決工業驅動難題
在工業機器人精準抓取的瞬間,在晶圓搬運設備高速運轉的毫秒間,傳統伺服電機外置線纜的干涉風險、笨重的體積限制,是否已成為制約設備性能的"阿喀琉斯之踵"?哈默納科HMA系列中空
其利天下技術·伺服電機在機器人技術中的應用
伺服電機作為機器人運動控制的核心部件,其高精度、高響應速度和高負載能力等特點,為機器人的精確運動提供了有力保障。在工業機器人、醫療

伺服電動缸在人形機器人中的應用
伺服電動缸在人形機器人中的應用非常廣泛,主要體現在以下幾個方面:一、核心運動部件伺服電動缸是將伺服電機與絲杠一體化設計的模塊化產品,能將
發表于 02-06 09:04
伺服系統在機器人中的作用 伺服系統與傳統電機對比
位置、速度和加速度的系統,它通過接收控制信號來驅動電機,實現對機器人關節的精確控制。 精確控制:伺服系統能夠提供精確的速度和位置控制,這對于執行復雜任務的機器人來說至關重要。例如,在裝
伺服電機在機器人中的應用有哪些
伺服電機作為現代工業自動化領域的核心組件,其精確控制和高效性能在機器人技術中扮演著至關重要的角色。 伺服電機的工作原理
伺服驅動器在機器人中的應用案例
在現代工業自動化和智能制造領域,機器人技術的發展日新月異,而伺服驅動器作為機器人系統中的關鍵組件之一,扮演著至關重要的角色。 1. 伺服驅動器的基本原理
什么是伺服電機?伺服電機的工作原理是什么?
伺服電機是一種高精度的電機,廣泛應用于自動化控制、機器人、精密機械等領域。它能夠根據輸入的控制信號,精確地控制電機的轉速、位置和力矩,實現對
伺服電機轉速調整方法
引言 伺服電機是一種將電能轉換為機械能的裝置,具有高精度、高響應速度、高穩定性等特點。在工業自動化、機器人、航空航天等領域,伺服電機被廣泛應
伺服電機常見的應用領域
伺服電機是一種高精度、高響應速度、高穩定性的電機,廣泛應用于各種自動化設備和精密設備中。以下是一些伺服電機常見的應用領域: 工業
基于FPGA EtherCAT的六自由度機器人視覺伺服控制設計
和增強系統處理圖像的實時性,本文提出了一種伊瑟特的六自由度機器人視覺伺服控制系統,將攝像頭集成到基于 Zynq的伊瑟特主站上,提高了視覺伺服的實時性.經測試,該平臺能夠對視覺檢測目標的變化做出及時的反應
發表于 05-29 16:17





 工商網監
工商網監
評論