CAN 總線協(xié)議已經(jīng)成為汽車計(jì)算機(jī)控制系統(tǒng)和嵌入式工業(yè)控制局域網(wǎng)的標(biāo)準(zhǔn)總線,并且擁有以CAN 為底層協(xié)議專為大型貨車和重工機(jī)械車輛設(shè)計(jì)的 J1939 協(xié)議。近年來,它具有的高可靠性和良好的錯(cuò)誤檢測(cè)能力受到重視,被廣泛應(yīng)用于汽車計(jì)算機(jī)控制系統(tǒng)和環(huán)境溫度惡劣、電磁輻射強(qiáng)及振動(dòng)大的工業(yè)環(huán)境。
2022-08-02 12:29:54 1591
1591 本文說的CAN即是一種總線,也是一種協(xié)議。因此,我們常聽見CAN總線,也常聽見CAN協(xié)議。
2022-09-15 12:47:162599 假期更新了一文搞懂CAN總線協(xié)議幀格式,CAN FD總線協(xié)議怎能錯(cuò)過?本篇博文將講解CAN FD總線協(xié)議幀格式。
2022-10-14 12:49:532679 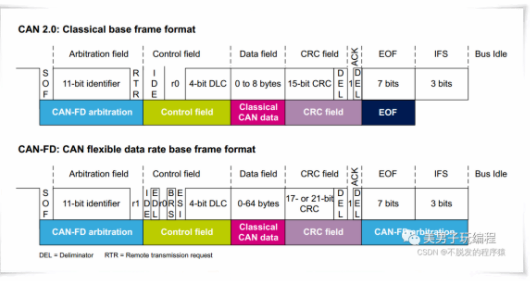
CAN總線:CAN 是Controller Area Network 的縮寫(以下稱為 CAN),是 ISO1 國(guó)際標(biāo)準(zhǔn)化的串行通信協(xié)議。
2023-08-14 14:58:59961 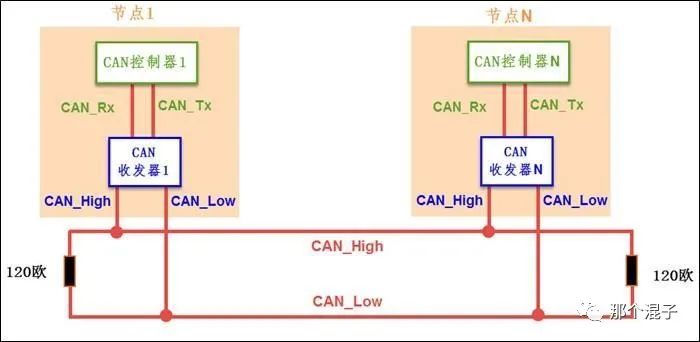
),是國(guó)際上應(yīng)用最廣泛的現(xiàn)場(chǎng)總線之一。 在北美和西歐,CAN總線協(xié)議已經(jīng)成為汽車計(jì)算機(jī)控制系統(tǒng)和嵌入式工業(yè)控制局域網(wǎng)的標(biāo)準(zhǔn)總線bxCAN簡(jiǎn)介bxCAN...
2021-08-20 06:27:07
請(qǐng)大家?guī)兔?解釋一下CAN總線協(xié)議 濾波器理解問題
2013-12-15 13:00:40
`CAN總線接口協(xié)議分析通過OSC482L進(jìn)行CAN總線接口的分析,儀器可選多種測(cè)量方式,可以支持單線或雙線方式測(cè)量。單線測(cè)試測(cè)量可以支持自動(dòng),CAN_H對(duì)地,CAN_L對(duì)地三種方式,雙線差分方式
2020-08-19 09:27:19
現(xiàn)在的汽車已經(jīng)不再僅僅是一種死氣沉沉的交通工具了。計(jì)算機(jī)的發(fā)明,也讓汽車有了一個(gè)職能的心。跟中嵌入式的計(jì)算機(jī)核心應(yīng)用到汽車當(dāng)中。那么如何規(guī)范這個(gè)核心的工作呢?這就需要CAN總線協(xié)議來幫忙了。現(xiàn)在
2014-04-18 16:36:30
CAN總線協(xié)議的打包與解包是如何進(jìn)行的?CAN總線協(xié)議是如何自動(dòng)生成代碼的?
2021-11-22 07:57:35
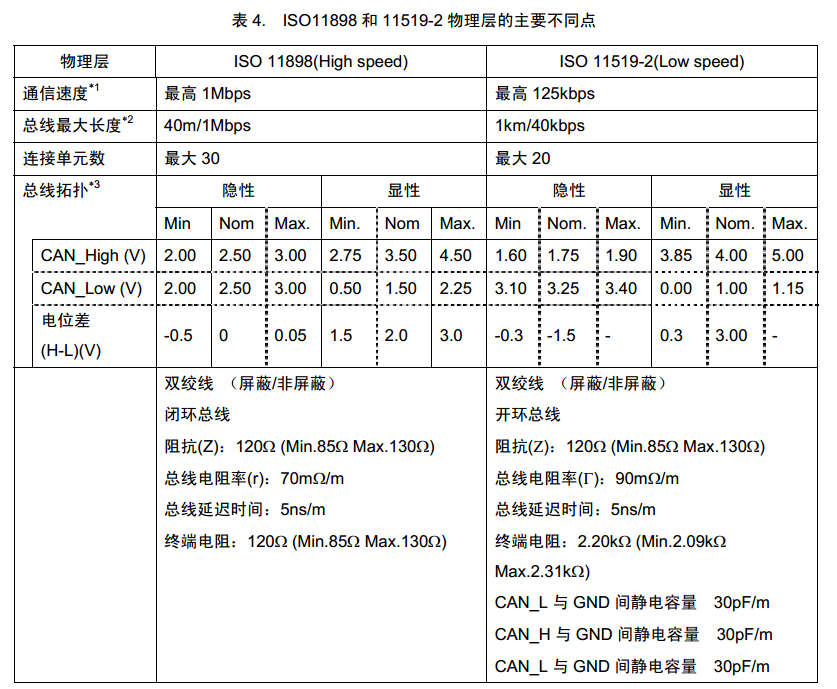
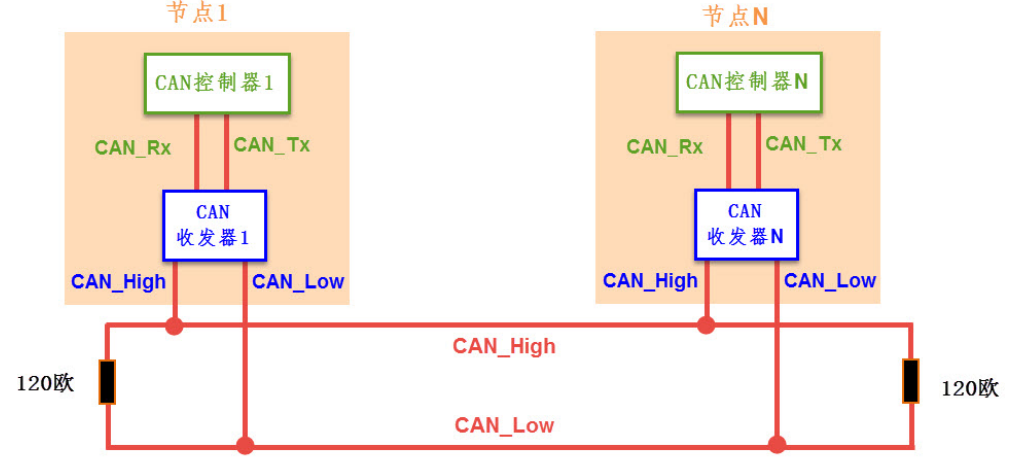
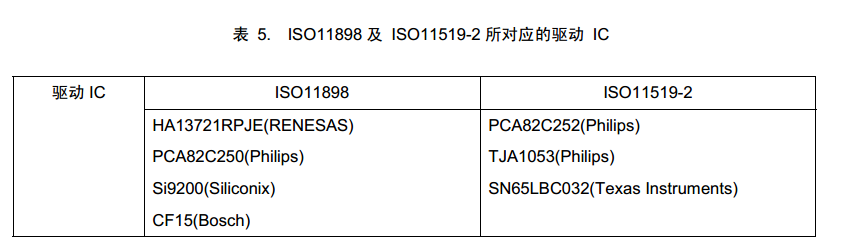
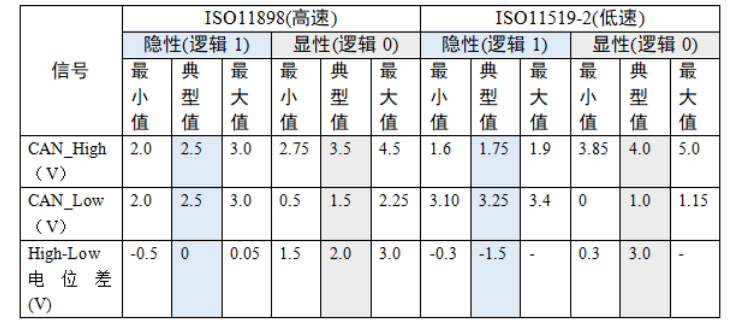
采用載波監(jiān)聽多路訪問、逐位仲裁的非破壞性總線仲裁技術(shù)。直接通信距離最遠(yuǎn)10km,速率5Kb/s通信速率最高可達(dá)1Mb/s,距離40m末端要有120歐終端電阻11898協(xié)議iso的osi模型11898-1對(duì)應(yīng)controller11898-2對(duì)應(yīng)高速can收發(fā)器11898-3對(duì)應(yīng)低速
2022-03-01 06:29:30
電子通信協(xié)議之CAN總線協(xié)議篇
2020-12-28 06:30:02
CAN總線技術(shù)
2012-08-16 12:46:36
CAN總線技術(shù)資料
2014-02-24 19:56:28
協(xié)議。CAN 的高性能和可靠性已被認(rèn)同,并被廣泛地應(yīng)用于工業(yè)自動(dòng)化、船舶、醫(yī)療設(shè)備、工業(yè)設(shè)備等方面。它的出現(xiàn)為分布式控制系統(tǒng)實(shí)現(xiàn)各節(jié)點(diǎn)之間實(shí)時(shí)、可靠的數(shù)據(jù)通信提供了強(qiáng)有力的技術(shù)支持。優(yōu)勢(shì)CAN屬于現(xiàn)場(chǎng)
2015-11-05 17:17:31
CAN總線技術(shù)特點(diǎn)是什么?CAN總線技術(shù)在汽車中的應(yīng)用具有什么優(yōu)勢(shì)?
2021-05-14 06:36:44
到存儲(chǔ)器中的CAN數(shù)據(jù)進(jìn)行分析和繪圖,基于LabVIEW平臺(tái)開發(fā)了此X-CAN離線分析平臺(tái)(以下簡(jiǎn)稱X-CAN)。該X-CAN離線分析平臺(tái)能夠自動(dòng)解析dbc格式的CAN通訊協(xié)議文件和CAN離線數(shù)據(jù),并
2020-01-05 11:22:13
現(xiàn)場(chǎng)總線VS工業(yè)以太網(wǎng)現(xiàn)場(chǎng)總線CAN總線(Control Area Network)一、CAN總線是什么?CAN總線的作用?CAN總線的優(yōu)點(diǎn)CAN總線拓?fù)鋱D各接口協(xié)議速率對(duì)比
2021-08-06 07:44:19
應(yīng)用最廣泛的現(xiàn)場(chǎng)總線之一。在北美和西歐,CAN總線協(xié)議已經(jīng)成為汽車計(jì)算機(jī)控制系統(tǒng)和嵌入式工業(yè)控制局域網(wǎng)的標(biāo)準(zhǔn)總線,并且擁有以CAN為底層協(xié)議專為大型貨車和重工機(jī)械車輛設(shè)計(jì)的J1939協(xié)議。CAN總線的特點(diǎn)(1)多主機(jī)方式工作:網(wǎng)絡(luò)上任意節(jié)點(diǎn)可在任意時(shí)刻其他節(jié)點(diǎn)發(fā)送數(shù)據(jù),通信方式靈活;(2)網(wǎng)絡(luò)上...
2022-01-13 07:52:18
當(dāng)局批準(zhǔn)CAN FD開發(fā)CAN的未來是光明的第三代CAN1986年2月,Robert Bosch GmbH在汽車工程師協(xié)會(huì)(SAE)大會(huì)上推出了控制器局域網(wǎng)(CAN)串行總線系統(tǒng)。這是有史以來最成功的網(wǎng)絡(luò)協(xié)議之一誕生的時(shí)刻。如今,歐洲幾乎所有汽車都配備了...
2021-08-19 09:14:09
必須是相同的。? 傳輸層描述了 CAN 總線協(xié)議的內(nèi)核,它負(fù)責(zé)位時(shí)序(bit timing)、同步、仲裁、應(yīng)答、錯(cuò)誤探測(cè)等。? 對(duì)象層負(fù)責(zé)報(bào)文的過濾、狀態(tài)和控制。? 應(yīng)用層完成用戶指定的數(shù)據(jù)傳輸任務(wù)。CAN 總線的物理層為數(shù)據(jù)通信提供了物理連接,而實(shí)際的數(shù)據(jù)通信在其他 3 層中完成。
2018-12-14 14:17:02
文中在分析CAN總線通信控制協(xié)議的基礎(chǔ)上,在MATLAB/Sinulink軟件Stateflow仿真環(huán)境下,利用有限狀態(tài)機(jī)理論對(duì)CAN總線通信系統(tǒng)進(jìn)行了形式化建模。通過此仿真模型,分析了CAN總線
2021-05-21 07:00:08
協(xié)議的CAN 總線通訊技術(shù)方法,在國(guó)內(nèi)汽車行業(yè)PXI 測(cè)控裝置的應(yīng)用屬于空白,難點(diǎn)是如何將LabVIEW 軟件開發(fā)平臺(tái)與復(fù)雜的J1939 協(xié)議有效結(jié)合,實(shí)現(xiàn)報(bào)文信息的過濾接收、合成重組及封裝發(fā)送。針對(duì)
2019-04-08 09:42:13
Can總線協(xié)議參考
2013-04-10 23:21:40
本資料是面向 CAN 總線初學(xué)者的 CAN 入門書。對(duì) CAN 是什么、CAN 的特征、標(biāo)準(zhǔn)規(guī)格下的位置分布等、CAN 的概要及 CAN 的協(xié)議進(jìn)行了說明。
2019-01-14 17:15:26
can總線的技術(shù)及應(yīng)用教程pdf版
2022-04-27 11:23:05
上傳時(shí)可自主、即時(shí)發(fā)送,先進(jìn)的仲裁機(jī)制保證數(shù)據(jù)不會(huì)沖突。 二、CAN 總線協(xié)議分析對(duì)比標(biāo)準(zhǔn)的通信七層模型,CAN 總線大體可分為物理層、鏈路層、應(yīng)用層。對(duì)鏈路層的解析就能得到節(jié)點(diǎn) ID 號(hào)。若對(duì)一個(gè)
2022-08-10 11:33:54
扔掉電源線,給自己的智能手機(jī)進(jìn)行無線充電。這對(duì)于許多人來說可能有點(diǎn)天方夜譚。但事實(shí)上,無線充電技術(shù)很快就要進(jìn)入大規(guī)模的商用化,這項(xiàng)此前不為大眾所熟悉的技術(shù),正悄然來到我們的面前。全面解析無線充電技術(shù)
2016-07-28 11:13:33
總線、接口和協(xié)議,這三個(gè)詞常常被聯(lián)系在一起,但是我們心里要明白他們的區(qū)別。總線是一組傳輸通道,是各種邏輯器件構(gòu)成的傳輸數(shù)據(jù)的通道,一般由由數(shù)據(jù)線、地址線、控制線等構(gòu)成。接口是一種連接標(biāo)準(zhǔn),又常常被稱之為物理接口。協(xié)議是傳輸數(shù)據(jù)的規(guī)則。
2021-02-05 07:30:05
月報(bào)最近學(xué)習(xí)了STM32的CAN總線協(xié)議,使用的是野火的開發(fā)板 CAN 是Controller Area Network 的縮寫(CAN BUS),具有布線簡(jiǎn)單、典型的總線型結(jié)構(gòu)、可最大限度的節(jié)約
2021-08-19 07:41:05
串行數(shù)據(jù)通信協(xié)議。目前,CAN 總線已經(jīng)被列入 ISO 國(guó)際標(biāo)準(zhǔn),稱為 ISO11898。CAN 總線已經(jīng)成為工業(yè)數(shù)據(jù)通信的主流技術(shù)之一。CAN 總線作為數(shù)字式串行通信技術(shù),與其他同類技術(shù)相比,在可靠性
2018-12-13 14:26:31
can總線本身有一個(gè)規(guī)范協(xié)議can 2.0b,那應(yīng)用層協(xié)議主要是規(guī)定哪些內(nèi)容的(我只知道有分配標(biāo)識(shí)符等),can總線通信的數(shù)據(jù)格式是不是也是在應(yīng)用層規(guī)定的?哪位高手能不能具體舉例講一下。------謝謝
2011-07-09 02:38:01
本文說的CAN即是一種總線,也是一種協(xié)議。因此,我們常聽見CAN總線,也常聽見CAN協(xié)議。CAN協(xié)議和CANOpen協(xié)議是兩套不同的協(xié)議。從軟硬件層次來劃分,CAN協(xié)議屬于硬件協(xié)議,而CANOpen
2018-10-10 09:53:40
圍繞“汽車CAN總線技術(shù)到底是怎么一回事?汽車總線的發(fā)展趨勢(shì)。汽車為什么選擇了CAN總線技術(shù)?采用汽車CAN總線技術(shù)有哪些優(yōu)點(diǎn)?”等問題作了一個(gè)淺短的介紹:1.汽車CAN總路線技術(shù)到底是怎么一回事
2015-06-24 13:56:39
現(xiàn)在正在做一個(gè)項(xiàng)目,就是在汽車上加個(gè)設(shè)備,通過CAN總線讀出發(fā)動(dòng)機(jī)的轉(zhuǎn)速和汽車的速度,不知道汽車上的CAN協(xié)議???是標(biāo)準(zhǔn)幀還是擴(kuò)展幀模式呢。。。。有沒有搞汽車電子的大神,求幫助,謝謝
2015-07-22 14:24:45
汽車為何選擇利用CAN總線技術(shù)呢?汽車CAN總線技術(shù)的優(yōu)點(diǎn)在哪里呢?汽車CAN總線技術(shù)的優(yōu)點(diǎn)有下面三點(diǎn),大家同意嗎?信息共享,減少線束,關(guān)聯(lián)控制。
2015-06-26 14:55:33
控制器局域網(wǎng)(CAN)是現(xiàn)代汽車網(wǎng)絡(luò)通信與控制系統(tǒng)中的重要組成部分,《汽車CAN總線系統(tǒng)原理、設(shè)計(jì)與應(yīng)用》全面、系統(tǒng)地介紹了汽車CAN總線的基本原理、應(yīng)用層協(xié)議制定、系統(tǒng)軟件和硬件設(shè)計(jì),并且通過實(shí)例
2018-04-09 22:27:02
汽車產(chǎn)業(yè)中得到廣泛使用的數(shù)據(jù)與控制通信網(wǎng)絡(luò),是一種極具強(qiáng)韌性的電氣規(guī)范和協(xié)議,專門設(shè)計(jì)用于轎車或卡車中危險(xiǎn)、常常無法預(yù)料的惡劣環(huán)境,而這種環(huán)境中有許多應(yīng)用需要極高的可靠性和容錯(cuò)能力。CAN總線最初是由
2019-04-09 07:00:08
現(xiàn)場(chǎng)總線技術(shù)是信息技術(shù)與控制技術(shù)的融合,是新一代控制技術(shù)的標(biāo)志。CAN 總線協(xié)議符合現(xiàn)場(chǎng)總線技術(shù)發(fā)展的趨勢(shì),是目前應(yīng)用最廣泛、最有前途的幾種現(xiàn)場(chǎng)總線之一。將CAN 總
2009-08-31 14:45:31 0
0 針對(duì)CAN 總線技術(shù)應(yīng)用的蓬勃發(fā)展,本文設(shè)計(jì)了一種基于CAN 總線的工程設(shè)備控制系統(tǒng),對(duì)總線通訊協(xié)議進(jìn)行了設(shè)計(jì)研究,介紹了基于CAN 總線技術(shù)的作業(yè)控制終端、作業(yè)控制器、虛擬
2009-09-03 10:14:0216 CAN總線在機(jī)車監(jiān)控系統(tǒng)中的應(yīng)用
以Philips公司的SJA1000為例,介紹了CAN現(xiàn)場(chǎng)總線的特點(diǎn),控制器的功能、結(jié)構(gòu)和CAN2.0B總線協(xié)議的基本內(nèi)容,闡述了一
2009-05-04 22:36:281005 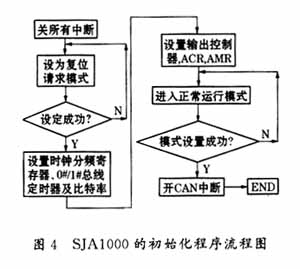
CAN總線系統(tǒng)測(cè)試技術(shù)簡(jiǎn)介
【摘 要】 CAN總線作為現(xiàn)場(chǎng)總線的一種,在汽車、船舶、航天、工業(yè)測(cè)控與工業(yè)自動(dòng)化等領(lǐng)域已經(jīng)得到廣泛的應(yīng)用。CAN總線
2010-03-11 11:22:358945 汽車CAN/LIN總線測(cè)試流程和測(cè)試工具解析
汽車CAN/LIN總線系統(tǒng)測(cè)試的關(guān)鍵是測(cè)試流程、測(cè)試標(biāo)準(zhǔn)和測(cè)試工具,掌握專業(yè)的總線分析和測(cè)試工具的使用技
2010-03-19 10:44:488041 針對(duì)不同的目的和要求的基于CAN協(xié)議的較高層協(xié)議標(biāo)準(zhǔn)。下面就對(duì)CAN 協(xié)議及其較高層協(xié)議DeviceNet和CANopen進(jìn)行一些比較。
2011-05-09 10:26:002690 
本文介紹了CAN 總線的主要性能及特點(diǎn),CAN 總線在實(shí)際工業(yè)應(yīng)用中的總體結(jié)構(gòu),同時(shí)給出了CAN 總線協(xié)議轉(zhuǎn)換器的硬件設(shè)計(jì)方法和通信協(xié)議。主要研究了CAN 總線接口電路設(shè)計(jì),把所設(shè)計(jì)的
2011-10-31 15:01:47463 本文分析了CAN 總線的一些特點(diǎn)以及在國(guó)內(nèi)的的應(yīng)用狀況,提出了引入國(guó)際上通用的CAN 總線高層應(yīng)用協(xié)議,以提高國(guó)內(nèi)CAN 系統(tǒng)應(yīng)用水平的建議,并簡(jiǎn)要介紹了一種CAN 的高層協(xié)議 CANopen 協(xié)
2012-03-27 15:37:57103 控制器局域網(wǎng)總線(CAN,Controller Area Network)是一種用于實(shí)時(shí)應(yīng)用的串行通訊協(xié)議總線,它可以使用雙絞線來傳輸信號(hào),是世界上應(yīng)用最廣泛的現(xiàn)場(chǎng)總線之一。CAN協(xié)議由德國(guó)的Robert Bos
2012-09-10 09:22:53197509 
現(xiàn)場(chǎng)總線CAN原理與應(yīng)用技術(shù),深入介紹CANBUS總線的應(yīng)用。
2016-01-12 11:28:4717 全面解析多點(diǎn)觸控技術(shù)
2017-01-14 12:30:4115 CAN現(xiàn)場(chǎng)總線系統(tǒng)設(shè)計(jì)技術(shù)第5章
2017-02-07 18:09:2010 基于雙CAN總線的數(shù)字伺服通信協(xié)議
2017-09-01 14:25:428 CAN總線詳細(xì)教程全面詳細(xì)深入制_不可錯(cuò)過
2017-09-04 08:45:4570 CAN總線通信協(xié)議的分析和實(shí)現(xiàn) CAN總線通信協(xié)議以及其實(shí)現(xiàn)方法
2017-09-04 08:45:3340 全面解析OSPF路由協(xié)議安全性分析
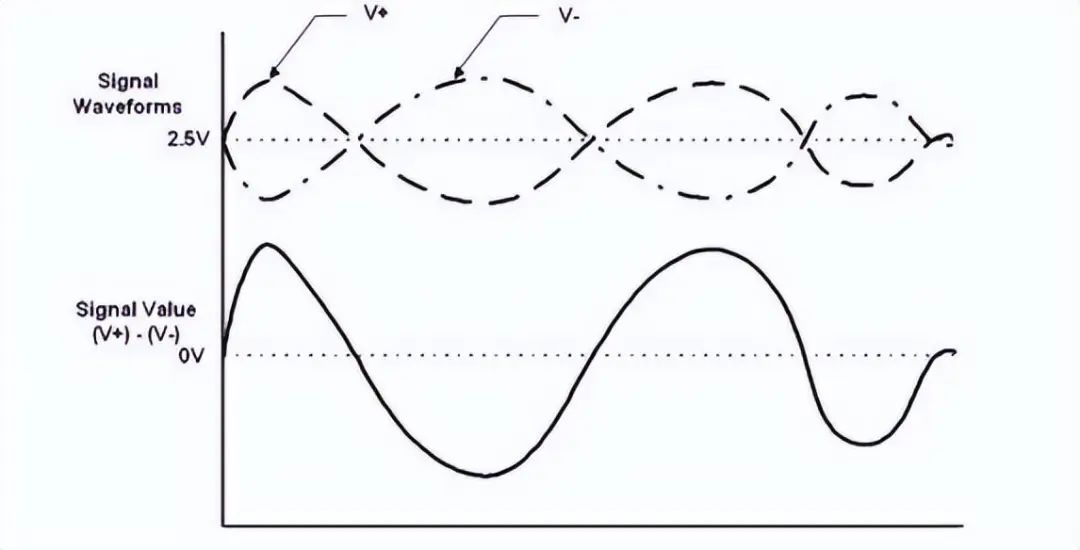
2017-09-07 09:33:088 CAN(控制器區(qū)域網(wǎng)絡(luò))總線是一種在汽車和工業(yè)機(jī)械中使用的串行協(xié)議,允許微控制器相互通訊。該標(biāo)準(zhǔn)最初由 Robert Bosch GmbH 于 1983 年制定。它使用雙絞線上傳輸差分信號(hào),分別為
2018-07-23 12:20:0016010 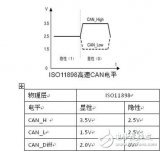
CAN總線是什么?CAN總線定義是什么? CAN(Controller Area Network)是ISO國(guó)際標(biāo)準(zhǔn)化的串行通信協(xié)議。廣泛應(yīng)用于汽車、船舶等。 CAN控制器通過組成總線
2017-12-27 13:40:0730720 
在各種現(xiàn)場(chǎng)總線中,CAN總線以其結(jié)構(gòu)簡(jiǎn)單、應(yīng)用靈活方便而在工業(yè)過程控制和車輛中得到廣泛應(yīng)用。在CAN的技術(shù)規(guī)范中,規(guī)定了CAN分為數(shù)據(jù)鏈路層和物理層兩層,用戶在設(shè)計(jì)通信軟件時(shí),必須先根據(jù)需求設(shè)計(jì)合適
2018-01-08 15:01:029 對(duì)比標(biāo)準(zhǔn)的通信七層模型,CAN總線大體可分為物理層、鏈路層、應(yīng)用層。對(duì)鏈路層的解析就能得到節(jié)點(diǎn)ID號(hào)。
2018-03-02 13:00:003677 
本文首先介紹了CAN總線技術(shù)的優(yōu)點(diǎn),其次介紹了CAN總線技術(shù)在汽車中的實(shí)際應(yīng)用優(yōu)勢(shì),最后介紹了CAN總線國(guó)內(nèi)外發(fā)展和應(yīng)用狀況以及CAN總線技術(shù)及發(fā)展趨勢(shì)。
2018-04-25 09:35:4416652 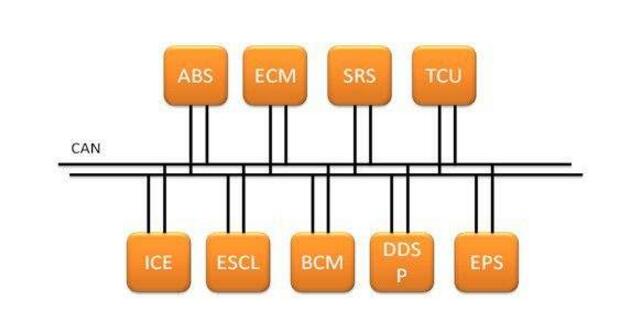
嵌入式網(wǎng)絡(luò)接口實(shí)現(xiàn)兩種網(wǎng)絡(luò)的互連。當(dāng)以太網(wǎng)應(yīng)用層有數(shù)據(jù)要發(fā)送到CAN節(jié)點(diǎn)時(shí),首先將數(shù)據(jù)發(fā)送到網(wǎng)關(guān),由以太網(wǎng)控制器協(xié)議轉(zhuǎn)換模塊解析完整的CAN協(xié)議數(shù)據(jù)包,通過CAN控制器發(fā)送到CAN總線。反之
2018-08-24 16:19:102651 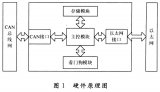
本文說的CAN即是一種總線,也是一種協(xié)議。因此,我們常聽見CAN總線,也常聽見CAN協(xié)議。CAN協(xié)議和CANOpen協(xié)議是兩套不同的協(xié)議。從軟硬件層次來劃分,CAN協(xié)議屬于硬件協(xié)議,而CANOpen
2018-10-03 19:53:0073332 
CANOpen系列教程02_理解CAN總線協(xié)議
2020-03-06 16:17:306389 CAN總線網(wǎng)絡(luò)測(cè)試: --滿足汽車電子產(chǎn)品不同CAN-BUS總線車型協(xié)議解析與逆向分析應(yīng)用 汽車教學(xué)實(shí)訓(xùn)CAN模擬控制仿真: --CAN-BUS車載網(wǎng)絡(luò)/車聯(lián)網(wǎng)示教臺(tái)/CAN總線教學(xué)實(shí)訓(xùn)箱應(yīng)用 汽車電檢測(cè)試應(yīng)用解決方案: --汽車CAN總線組合儀表電檢/汽車IP總成電檢/汽車電子電器電檢臺(tái)應(yīng)用
2020-03-06 14:28:36949 CAN協(xié)議教程 介紹:CAN總線 CAN總線是廣播類型的總線。這意味著所有節(jié)點(diǎn)都可以偵聽到所有傳輸?shù)膱?bào)文。無法將報(bào)文單獨(dú)發(fā)送給指定節(jié)點(diǎn);所有節(jié)點(diǎn)都將始終捕獲所有報(bào)文。但是,CAN硬件能夠提供本地過濾
2020-04-03 15:32:2213499 現(xiàn)在的汽車一般都采用CAN總線作為標(biāo)準(zhǔn)的通訊總線,我們?nèi)绻軌?b class="flag-6" style="color: red">解析出一臺(tái)車子的CAN總線數(shù)據(jù),就能夠?qū)@臺(tái)車子的狀態(tài)有一個(gè)非常好的了解
2020-08-06 16:23:072936 CAN總線通信協(xié)議詳細(xì)如下。
2021-04-19 16:54:3875 CAN總線協(xié)議及CAN在工業(yè)控制中的應(yīng)用說明。
2021-04-20 11:14:0127 以MSCAN08和MSCAN12為示例,講述CAN現(xiàn)場(chǎng)總線,初步掌握CAN總線技術(shù)的應(yīng)用。
2021-04-20 16:12:35287 使用STM32Cube MX為STM32 CAN總線快速上手教程_HAL庫(kù)_CAN協(xié)議_STM32前言博主也是剛接觸CAN協(xié)議的新手,如有不對(duì)的地方歡迎交流本文旨在使用STM32Cube MX快速
2021-12-04 17:36:0533 ),是一種用于實(shí)時(shí)應(yīng)用的串行通訊協(xié)議總線,它可以使用雙絞線來傳輸信號(hào),是世界上應(yīng)用最廣泛的現(xiàn)場(chǎng)總線之一。CAN協(xié)議用于汽車中各種不同元件之間的通信,用來取代昂貴而笨重的配電線束。CAN協(xié)議的使用廣泛這一特點(diǎn)使其很快延伸到自動(dòng)化控制以及工業(yè)領(lǐng)域中。 CAN協(xié)議的特性包括完
2022-01-15 17:04:485782 《CAN總線技術(shù)與應(yīng)用系統(tǒng)設(shè)計(jì)》pdf
2022-02-07 18:06:370 上個(gè)月小編攜《汽車CAN-FD總線技術(shù)大揭秘》一文帶大家了解了CAN-FD總線的前世今生,從CAN總線發(fā)展歷程、總線拓?fù)鋱D及OSI協(xié)議棧模型等方面,對(duì)CAN總線進(jìn)行了較為全面的講解,同時(shí)還介紹了DS70000系列數(shù)字示波器在CAN-FD協(xié)議解碼上的功能支持。
2022-03-25 15:36:082102 本資料是面向CAN總線初學(xué)者的CAN入門書。對(duì)CAN是什么、CAN的特征、標(biāo)準(zhǔn)規(guī)格下的位置分布等、CAN的概要及CAN的協(xié)議進(jìn)行了說明。
2022-04-02 16:35:3223 當(dāng)汽車工業(yè)進(jìn)入發(fā)展階段時(shí),CAN 總線已經(jīng)開始以其能夠提供的廣泛功能應(yīng)用于該行業(yè)。它在具有以非常合理的成本同時(shí)擁有相當(dāng)多的優(yōu)秀特性,很快就成為了目前使用的核心通信協(xié)議。但是,隨著時(shí)間的推移,技術(shù)
2022-06-20 17:40:144968 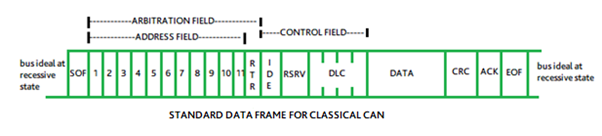
CAN總線協(xié)議(Controller Area Network),控制器局域網(wǎng)總線,是德國(guó)BOSCH(博世)公司研發(fā)的一種串行通訊協(xié)議總線,它可以使用雙絞線來傳輸信號(hào),是世界上應(yīng)用最廣泛的現(xiàn)場(chǎng)總線之一。
2022-09-09 12:13:422113 CAN總線上傳輸?shù)男畔⒎Q為報(bào)文,當(dāng)總線空閑時(shí)任何連接的單元都可以開始發(fā)送新的報(bào)文。
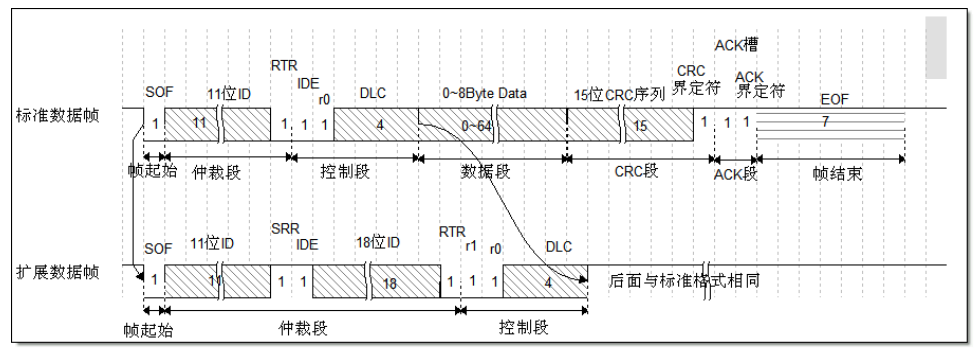
2022-10-17 15:09:493134 CAN總線是一種常用的總線,對(duì)于剛開始接觸CAN總線的,面對(duì)著各式各樣的資料,可能不知道從何看起,今天科普一下CAN總線的基礎(chǔ)知識(shí)。CAN2.0協(xié)議分為A版本和B版本,A版本協(xié)議為11位標(biāo)識(shí)符(標(biāo)準(zhǔn)幀),B版本在兼容11位ID標(biāo)識(shí)符的同時(shí),向上擴(kuò)展到29位ID標(biāo)識(shí)符。
2023-02-09 15:43:152666 今天給大俠帶來基于FPGA的CAN總線控制器的設(shè)計(jì),由于篇幅較長(zhǎng),分三篇。今天帶來第一篇,上篇,CAN 總線協(xié)議解析以及 CAN 通信控制器程序基本框架。話不多說,上貨。
2023-05-18 09:21:30868 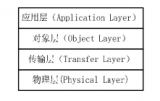
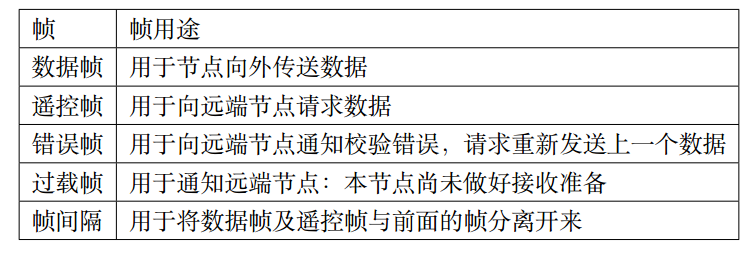
節(jié)點(diǎn)錯(cuò)誤狀態(tài),并通過實(shí)際的應(yīng)用測(cè)試生成并記錄CAN錯(cuò)誤。CAN總線錯(cuò)誤類型CAN總線協(xié)議規(guī)定了5種CAN錯(cuò)誤類型:位錯(cuò)誤[發(fā)送器]位填充錯(cuò)誤[接收器]格式錯(cuò)誤[接收
2022-06-09 09:46:531176 
節(jié)點(diǎn)錯(cuò)誤狀態(tài),并通過實(shí)際的應(yīng)用測(cè)試生成并記錄CAN錯(cuò)誤。前文回顧虹科干貨|帶你全面認(rèn)識(shí)“CAN總線錯(cuò)誤”(一)——CAN總線錯(cuò)誤與錯(cuò)誤幀虹科干貨|帶你全面認(rèn)識(shí)“CA
2022-06-09 09:46:031410 節(jié)點(diǎn)錯(cuò)誤狀態(tài),并通過實(shí)際的應(yīng)用測(cè)試生成并記錄CAN錯(cuò)誤。CAN總線錯(cuò)誤類型CAN總線協(xié)議規(guī)定了5種CAN錯(cuò)誤類型:位錯(cuò)誤[發(fā)送器]位填充錯(cuò)誤[接收器]格式錯(cuò)誤[接收
2022-06-02 09:41:24813 CAN總線是可以掛載多個(gè)控制單元,每個(gè)單元均可以發(fā)送和接收數(shù)據(jù),為了避免發(fā)生沖突,協(xié)議規(guī)定只有等信道空閑時(shí)刻優(yōu)先級(jí)高的單元才能占有總線并發(fā)送數(shù)據(jù),那么CAN單元是如何判斷優(yōu)先級(jí)的呢?CAN仲裁的實(shí)現(xiàn)
2023-02-02 10:52:58447 
labview讀取解析can總線dbc文件
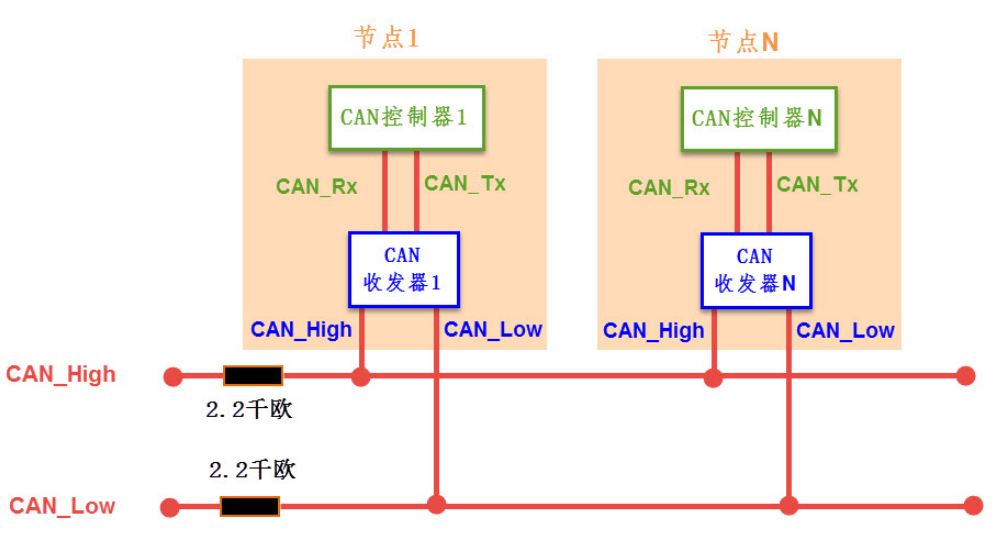
2023-07-03 09:18:2665 車載CAN(Controller Area Network)通信協(xié)議是一種廣泛應(yīng)用于汽車領(lǐng)域的串行通信協(xié)議,用于實(shí)現(xiàn)車輛內(nèi)部各個(gè)電子控制單元(ECU)之間的通信。CAN協(xié)議由國(guó)際標(biāo)準(zhǔn)化組織(ISO)制定,目前最常用的版本是ISO 11898標(biāo)準(zhǔn)。
2023-07-11 16:15:401378 
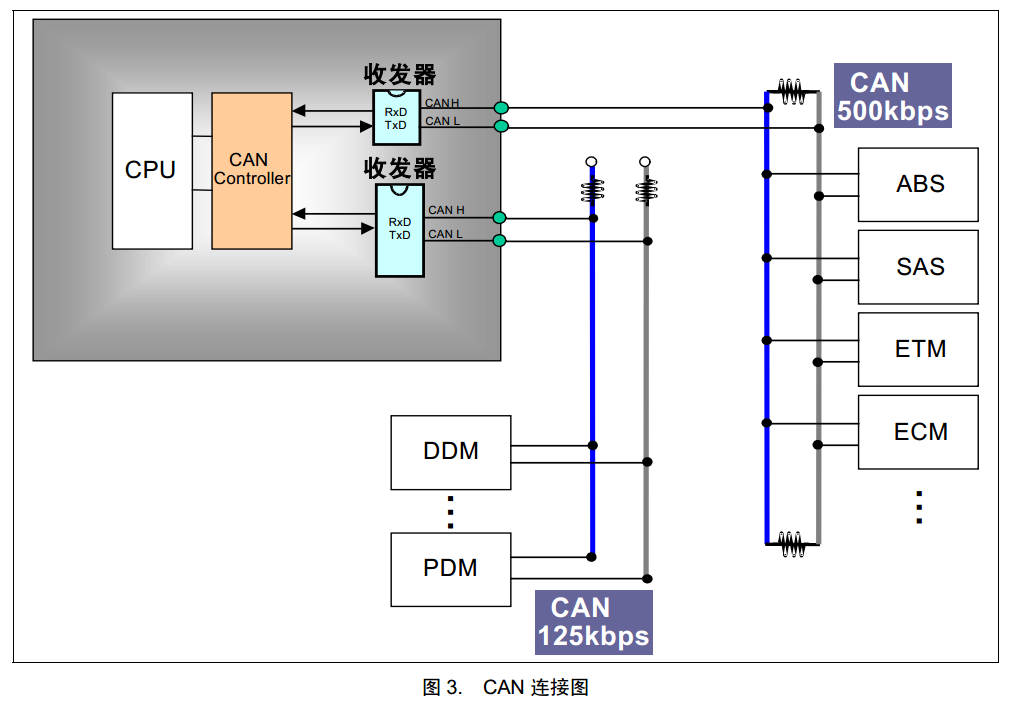
根據(jù)CAN總線的硬件特性,當(dāng)一條CAN總線上掛接多個(gè)驅(qū)動(dòng)器的時(shí)候,應(yīng)當(dāng)按照如下示意圖進(jìn)行連接布線。 需要在線的起點(diǎn)和終點(diǎn)上各連上一個(gè) 120Ω的電阻。并且 CAN 總線只能有一條主干線,分支的線不宜過長(zhǎng)。
2023-07-26 17:05:42737 
認(rèn)識(shí)CAN 總線錯(cuò)誤的第一步就是了解認(rèn)識(shí)CAN 總線協(xié)議和它的具體功能,這樣才能更容易地理解CAN 總線是如何去發(fā)現(xiàn)并解決錯(cuò)誤的。
2023-08-14 15:18:463228 
CAN總線(Controller Area Network)是一種廣泛應(yīng)用于汽車、工業(yè)自動(dòng)化和其他領(lǐng)域的串行通信協(xié)議。以下是幾種常見的CAN總線通信協(xié)議。
2023-08-18 14:40:128848 
can總線為什么要用雙絞線?can總線不用雙絞線可以嗎? CAN總線是一種數(shù)據(jù)通信協(xié)議,廣泛用于汽車、航空、船舶、工業(yè)自動(dòng)化、機(jī)器人等領(lǐng)域。CAN總線采用串行通信方式,主要用于實(shí)現(xiàn)多個(gè)模塊之間的通信
2023-09-14 16:48:053603 CAN協(xié)議棧 汽車CAN協(xié)議棧是一種軟件組件,用于實(shí)現(xiàn)汽車電子系統(tǒng)中的CAN總線通信功能。它包含了一系列的功能軟件,用于處理CAN總線的物理層和數(shù)據(jù)鏈路層的通信協(xié)議。 汽車CAN協(xié)議棧的功能軟件主要
2023-10-27 16:16:541516 
CAN總線技術(shù)
2022-12-30 09:19:573 CAN總線技術(shù)基礎(chǔ)
2022-12-30 09:19:586 CAN(Controller Area Network)是一種用于實(shí)時(shí)應(yīng)用的串行通訊協(xié)議總線,它可以使用雙絞線來傳輸信號(hào),是世界上應(yīng)用最廣泛的現(xiàn)場(chǎng)總線之一。CAN協(xié)議用于汽車中各種不同元件之間的通信,以此取代昂貴而笨重的配電線束。
2023-11-01 16:39:54512 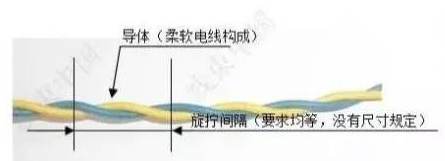
CAN總線通訊協(xié)議由德國(guó)博世于上世紀(jì)80年代發(fā)明,第一個(gè)使用CAN總線通訊協(xié)議的量產(chǎn)車型是1991年的奔馳S級(jí)轎車,至今CAN總線依舊是車內(nèi)主要的通訊總線。隨著汽車電子智能化加速,CAN總線也開始
2023-12-21 14:03:45663 
CAN總線協(xié)議是一種串行通訊協(xié)議,主要用于汽車和工業(yè)自動(dòng)化領(lǐng)域,實(shí)現(xiàn)了實(shí)時(shí)應(yīng)用的需求。 首先,CAN總線協(xié)議的基本概念包括報(bào)文、信息路由和位速率。在CAN系統(tǒng)中,總線上傳輸?shù)男畔⒁圆煌袷降膱?bào)文發(fā)送
2024-01-19 17:47:57276 總線的特性。 首先,高速CAN總線是指數(shù)據(jù)傳輸速率較高的CAN總線,其中包括CAN 2.0A和CAN 2.0B兩種協(xié)議。CAN 2.0A支持11位標(biāo)準(zhǔn)幀和29位擴(kuò)展幀,最大傳輸速率可達(dá)到1 Mbps
2024-01-31 14:09:01497
 電子發(fā)燒友App
電子發(fā)燒友App










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論