") 全面解讀CAN總線協(xié)議的相關(guān)知識(shí)
全面解讀CAN總線協(xié)議的相關(guān)知識(shí)
1 CAN 協(xié)議簡(jiǎn)介
車載CAN(Controller Area Network)通信協(xié)議是一種廣泛應(yīng)用于汽車領(lǐng)域的串行通信協(xié)議,用于實(shí)現(xiàn)車輛內(nèi)部各個(gè)電子控制單元(ECU)之間的通信。CAN協(xié)議由國(guó)際標(biāo)準(zhǔn)化組織(ISO)制定,目前最常用的版本是ISO 11898標(biāo)準(zhǔn)。
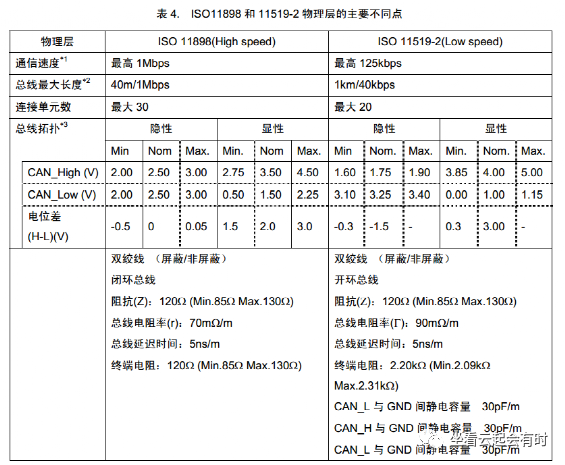
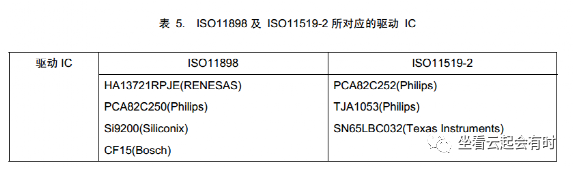
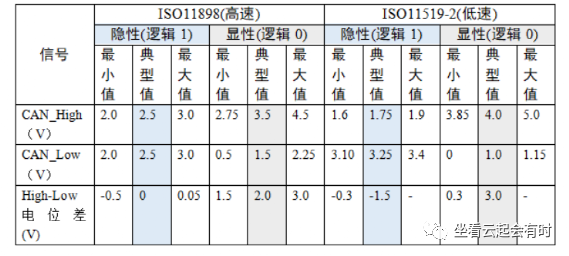
ISO11519和ISO11898的差異點(diǎn)如下:
CAN通信協(xié)議具有以下特點(diǎn)和優(yōu)勢(shì):
可靠性:CAN協(xié)議采用了差分信號(hào)傳輸和沖突檢測(cè)機(jī)制,能夠有效抵抗電磁干擾和噪聲,提供較高的通信可靠性。
高效性:CAN協(xié)議使用了非常快速的位傳輸率(通常為1 Mbps),并采用了優(yōu)先級(jí)機(jī)制,能夠高效地傳輸數(shù)據(jù)和處理通信。
靈活性:CAN協(xié)議支持多主機(jī)和多節(jié)點(diǎn)的通信結(jié)構(gòu),節(jié)點(diǎn)可以根據(jù)優(yōu)先級(jí)發(fā)送消息,并能夠動(dòng)態(tài)地加入或離開(kāi)通信網(wǎng)絡(luò)。
實(shí)時(shí)性:CAN協(xié)議具有較低的延遲和確定性,可以滿足實(shí)時(shí)控制和通信需求,例如發(fā)動(dòng)機(jī)控制、剎車系統(tǒng)等。
易于集成:CAN協(xié)議被廣泛應(yīng)用于汽車領(lǐng)域,大多數(shù)汽車上的ECU都支持CAN通信,因此易于系統(tǒng)集成和擴(kuò)展。
在CAN通信中,數(shù)據(jù)通過(guò)CAN總線進(jìn)行傳輸,CAN總線由兩根導(dǎo)線組成:CAN高(CAN_H)線和CAN低(CAN_L)線。通信節(jié)點(diǎn)通過(guò)CAN控制器和CAN收發(fā)器連接到CAN總線上。CAN控制器負(fù)責(zé)管理消息的發(fā)送和接收,而CAN收發(fā)器則負(fù)責(zé)將控制器和總線之間的電信號(hào)轉(zhuǎn)換。
在使用CAN協(xié)議進(jìn)行通信時(shí),需要遵循ISO 11898標(biāo)準(zhǔn)定義的協(xié)議規(guī)范。該標(biāo)準(zhǔn)定義了CAN數(shù)據(jù)幀的結(jié)構(gòu)和格式,包括標(biāo)識(shí)符(Identifier)、數(shù)據(jù)域(Data Field)、控制域(Control Field)、CRC校驗(yàn)(Cyclic Redundancy Check)等。CAN協(xié)議支持兩種數(shù)據(jù)幀格式:標(biāo)準(zhǔn)數(shù)據(jù)幀(11位標(biāo)識(shí)符)和擴(kuò)展數(shù)據(jù)幀(29位標(biāo)識(shí)符)。
除了基本的數(shù)據(jù)傳輸外,CAN協(xié)議還支持其他功能,如錯(cuò)誤檢測(cè)和錯(cuò)誤處理機(jī)制、遠(yuǎn)程幀(Remote Frame)的發(fā)送和響應(yīng)、布局描述符(Layout Descriptor)的定義等。
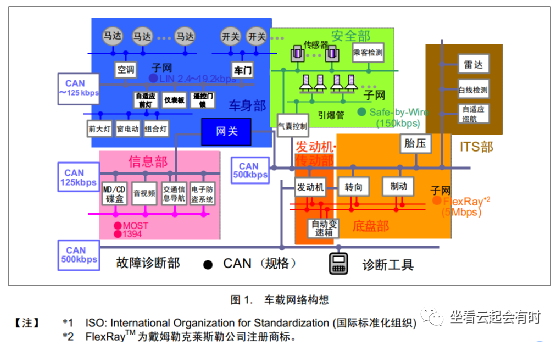
我們來(lái)貼圖一個(gè)車載網(wǎng)絡(luò)構(gòu)想圖
2 CAN 物理層
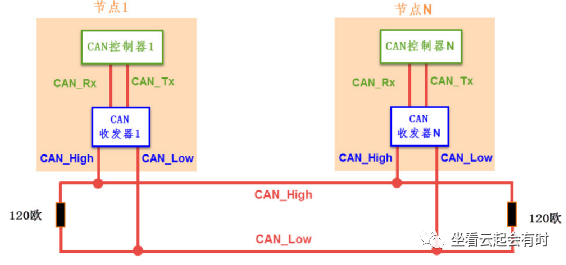
與 I2C、SPI 等具有時(shí)鐘信號(hào)的同步通訊方式不同,CAN 通訊并不是以時(shí)鐘信號(hào)來(lái)進(jìn)行同步的,它是一種異步通訊,只具有 CAN_High 和 CAN_Low 兩條信號(hào)線,共同構(gòu)成一組差分信號(hào)線,以差分信號(hào)的形式進(jìn)行通訊。我們來(lái)看一個(gè)示意圖
閉環(huán)總線網(wǎng)絡(luò)
CAN 物理層的形式主要有兩種,圖中的 CAN 通訊網(wǎng)絡(luò)是一種遵循 ISO11898 標(biāo)準(zhǔn)的高速、短距離“閉環(huán)網(wǎng)絡(luò)”,它的總線最大長(zhǎng)度為 40m,通信速度最高為 1Mbps,總線的兩端各要求有一個(gè)“120 歐”的電阻。
開(kāi)環(huán)總線網(wǎng)絡(luò)
圖中的是遵循 ISO11519-2 標(biāo)準(zhǔn)的低速、遠(yuǎn)距離“開(kāi)環(huán)網(wǎng)絡(luò)”,它的最大傳輸距離為 1km,最高通訊速率為 125kbps,兩根總線是獨(dú)立的、不形成閉環(huán),要求每根總線上各串聯(lián)有一個(gè)“2.2千歐”的電阻。
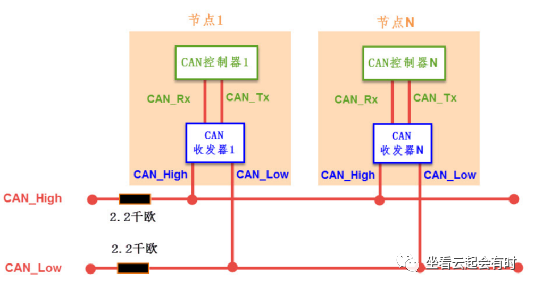
通訊節(jié)點(diǎn)
從 CAN 通訊網(wǎng)絡(luò)圖可了解到,CAN 總線上可以掛載多個(gè)通訊節(jié)點(diǎn),節(jié)點(diǎn)之間的信號(hào)經(jīng)過(guò)總線傳輸,實(shí)現(xiàn)節(jié)點(diǎn)間通訊。由于 CAN 通訊協(xié)議不對(duì)節(jié)點(diǎn)進(jìn)行地址編碼,而是對(duì)數(shù)據(jù)內(nèi)容進(jìn)行編碼的,所以網(wǎng)絡(luò)中的節(jié)點(diǎn)個(gè)數(shù)理論上不受限制,只要總線的負(fù)載足夠即可,可以通過(guò)中繼器增強(qiáng)負(fù)載。
CAN 通訊節(jié)點(diǎn)由一個(gè) CAN 控制器及 CAN 收發(fā)器組成,控制器與收發(fā)器之間通過(guò) CAN_Tx 及CAN_Rx 信號(hào)線相連,收發(fā)器與 CAN 總線之間使用 CAN_High 及 CAN_Low 信號(hào)線相連。其中CAN_Tx 及 CAN_Rx 使用普通的類似 TTL 邏輯信號(hào),而 CAN_High 及 CAN_Low 是一對(duì)差分信號(hào)線,使用比較特別的差分信號(hào),下一小節(jié)再詳細(xì)說(shuō)明。
當(dāng) CAN 節(jié)點(diǎn)需要發(fā)送數(shù)據(jù)時(shí),控制器把要發(fā)送的二進(jìn)制編碼通過(guò) CAN_Tx 線發(fā)送到收發(fā)器,然后由收發(fā)器把這個(gè)普通的邏輯電平信號(hào)轉(zhuǎn)化成差分信號(hào),通過(guò)差分線 CAN_High 和 CAN_Low 線輸出到 CAN 總線網(wǎng)絡(luò)。而通過(guò)收發(fā)器接收總線上的數(shù)據(jù)到控制器時(shí),則是相反的過(guò)程,收發(fā)器把總線上收到的 CAN_High 及 CAN_Low 信號(hào)轉(zhuǎn)化成普通的邏輯電平信號(hào),通過(guò) CAN_Rx 輸出到控制器中。
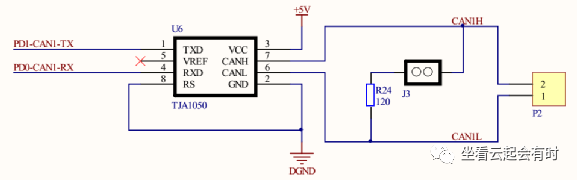
例如,STM32 的 CAN 片上外設(shè)就是通訊節(jié)點(diǎn)中的控制器,為了構(gòu)成完整的節(jié)點(diǎn),還要給它外接一個(gè)收發(fā)器,在我們實(shí)驗(yàn)板中使用型號(hào)為 TJA1050 的芯片作為 CAN 收發(fā)器。CAN 控制器與 CAN收發(fā)器的關(guān)系如同 TTL 串口與 MAX3232 電平轉(zhuǎn)換芯片的關(guān)系, MAX3232 芯片把 TTL 電平的串口信號(hào)轉(zhuǎn)換成 RS-232 電平的串口信號(hào),CAN 收發(fā)器的作用則是把 CAN 控制器的 TTL 電平信號(hào)轉(zhuǎn)換成差分信號(hào) (或者相反) 。
目前有以下CAN電平轉(zhuǎn)換芯片(不全)
我們來(lái)用TJA1050來(lái)看下原理圖:
差分信號(hào)
差分信號(hào)又稱差模信號(hào),與傳統(tǒng)使用單根信號(hào)線電壓表示邏輯的方式有區(qū)別,使用差分信號(hào)傳輸時(shí),需要兩根信號(hào)線,這兩個(gè)信號(hào)線的振幅相等,相位相反,通過(guò)兩根信號(hào)線的電壓差值來(lái)表示邏輯 0 和邏輯 1。見(jiàn)圖,它使用了 V+ 與 V-信號(hào)的差值表達(dá)出了圖下方的信號(hào)。
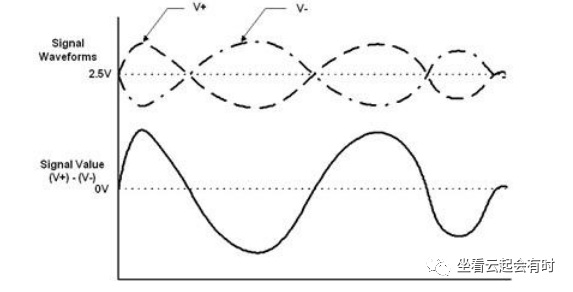
相對(duì)于單信號(hào)線傳輸?shù)姆绞剑褂貌罘中盘?hào)傳輸具有如下優(yōu)點(diǎn):
? 抗干擾能力強(qiáng),當(dāng)外界存在噪聲干擾時(shí),幾乎會(huì)同時(shí)耦合到兩條信號(hào)線上,而接收端只關(guān)心兩個(gè)信號(hào)的差值,所以外界的共模噪聲可以被完全抵消。
舉一個(gè)例子,正常的單線假設(shè)邏輯1是3.3V,邏輯0假設(shè)是0V,但是如果有噪聲,把3.3V弄成了0V(極端),把0V弄成了-3.3V,此時(shí)就邏輯錯(cuò)誤,但是有Can高/Can低一般都作用于兩根線,所以兩個(gè)雖然都有噪聲影響,但是差值還是不變的
? 能有效抑制它對(duì)外部的電磁干擾,同樣的道理,由于兩根信號(hào)的極性相反,他們對(duì)外輻射的電磁場(chǎng)可以相互抵消,耦合的越緊密,泄放到外界的電磁能量越少。
舉一個(gè)例子,假設(shè)一根是10V,一根是-10V,單跟都會(huì)對(duì)外部造成電磁干擾,但是CAN可以把線擰在一起,跟編麻花一樣,可以互相抵消電子干擾
? 時(shí)序定位精確,由于差分信號(hào)的開(kāi)關(guān)變化是位于兩個(gè)信號(hào)的交點(diǎn),而不像普通單端信號(hào)依靠高低兩個(gè)閾值電壓判斷,因而受工藝,溫度的影響小,能降低時(shí)序上的誤差,同時(shí)也更適合于低幅度信號(hào)的電路。
由于差分信號(hào)線具有這些優(yōu)點(diǎn),所以在 USB 協(xié)議、485 協(xié)議、以太網(wǎng)協(xié)議及 CAN 協(xié)議的物理層中,都使用了差分信號(hào)傳輸。
CAN 協(xié)議中的差分信號(hào)
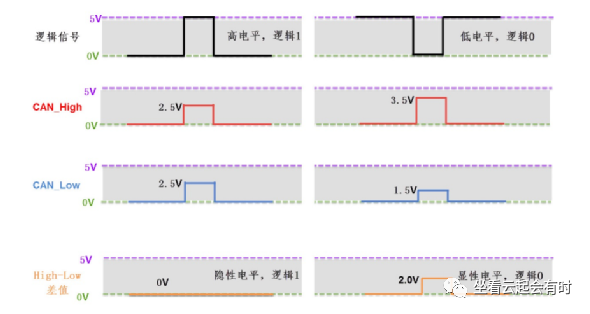
CAN 協(xié)議中對(duì)它使用的 CAN_High 及 CAN_Low 表示的差分信號(hào)做了規(guī)定,見(jiàn)表及圖。以高速 CAN 協(xié)議為例,當(dāng)表示邏輯 1 時(shí) (隱性電平) ,CAN_High 和 CAN_Low 線上的電壓均為 2.5v,即它們的電壓差 VH-VL=0V;而表示邏輯 0 時(shí) (顯性電平) ,CAN_High 的電平為 3.5V,CAN_Low 線的電平為 1.5V,即它們的電壓差為 VH-VL=2V。例如,當(dāng) CAN收發(fā)器從 CAN_Tx 線接收到來(lái)自 CAN 控制器的低電平信號(hào)時(shí) (邏輯 0),它會(huì)使 CAN_High 輸出3.5V,同時(shí) CAN_Low 輸出 1.5V,從而輸出顯性電平表示邏輯 0 。
在 CAN 總線中,必須使它處于隱性電平 (邏輯 1) 或顯性電平 (邏輯 0) 中的其中一個(gè)狀態(tài)。假如有兩個(gè) CAN 通訊節(jié)點(diǎn),在同一時(shí)間,一個(gè)輸出隱性電平,另一個(gè)輸出顯性電平,類似 I2C 總線的“線與”特性將使它處于顯性電平狀態(tài),顯性電平的名字就是這樣來(lái)的,即可以認(rèn)為顯性具有優(yōu)先的意味。
由于 CAN 總線協(xié)議的物理層只有 1 對(duì)差分線,在一個(gè)時(shí)刻只能表示一個(gè)信號(hào),所以對(duì)通訊節(jié)點(diǎn)來(lái)說(shuō),CAN 通訊是半雙工的,收發(fā)數(shù)據(jù)需要分時(shí)進(jìn)行。在 CAN 的通訊網(wǎng)絡(luò)中,因?yàn)楣灿每偩€,在整個(gè)網(wǎng)絡(luò)中同一時(shí)刻只能有一個(gè)通訊節(jié)點(diǎn)發(fā)送信號(hào),其余的節(jié)點(diǎn)在該時(shí)刻都只能接收。
3 CAN 協(xié)議層
CAN 的波特率及位同步
由于 CAN 屬于異步通訊,沒(méi)有時(shí)鐘信號(hào)線,連接在同一個(gè)總線網(wǎng)絡(luò)中的各個(gè)節(jié)點(diǎn)會(huì)像串口異步通訊那樣,節(jié)點(diǎn)間使用約定好的波特率進(jìn)行通訊,特別地, CAN 還會(huì)使用“位同步”的方式來(lái)抗干擾、吸收誤差,實(shí)現(xiàn)對(duì)總線電平信號(hào)進(jìn)行正確的采樣,確保通訊正常。
位時(shí)序分解
為了實(shí)現(xiàn)位同步,CAN 協(xié)議把每一個(gè)數(shù)據(jù)位的時(shí)序分解成如圖 所示的 SS 段、PTS 段、PBS1 段、PBS2 段,這四段的長(zhǎng)度加起來(lái)即為一個(gè) CAN 數(shù)據(jù)位的長(zhǎng)度。分解后最小的時(shí)間單位是 Tq,而一個(gè)完整的位由 8~25 個(gè) Tq 組成。為方便表示,圖 中的高低電平直接代表信號(hào)邏輯 0 或邏輯 1(不是差分信號(hào))。
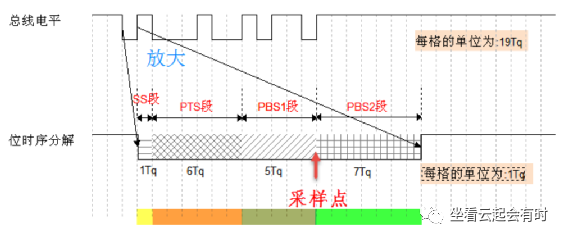
該圖中表示的 CAN 通訊信號(hào)每一個(gè)數(shù)據(jù)位的長(zhǎng)度為 19Tq,其中 SS 段占 1Tq, PTS 段占 6Tq, PBS1段占 5Tq, PBS2 段占 7Tq。信號(hào)的采樣點(diǎn)位于 PBS1 段與 PBS2 段之間,通過(guò)控制各段的長(zhǎng)度,可以對(duì)采樣點(diǎn)的位置進(jìn)行偏移,以便準(zhǔn)確地采樣。
各段的作用如介紹下:
? SS 段 (SYNC SEG)
SS 譯為同步段,若通訊節(jié)點(diǎn)檢測(cè)到總線上信號(hào)的跳變沿被包含在 SS 段的范圍之內(nèi),則表示節(jié)點(diǎn)與總線的時(shí)序是同步的,當(dāng)節(jié)點(diǎn)與總線同步時(shí),采樣點(diǎn)采集到的總線電平即可被確定為該位的電平。SS 段的大小固定為 1Tq。
? PTS 段 (PROP SEG)
PTS 譯為傳播時(shí)間段,這個(gè)時(shí)間段是用于補(bǔ)償網(wǎng)絡(luò)的物理延時(shí)時(shí)間。是總線上輸入比較器延時(shí)和輸出驅(qū)動(dòng)器延時(shí)總和的兩倍。PTS 段的大小可以為 1~8Tq。
? PBS1 段 (PHASE SEG1),
PBS1 譯為相位緩沖段,主要用來(lái)補(bǔ)償邊沿階段的誤差,它的時(shí)間長(zhǎng)度在重新同步的時(shí)候可以加長(zhǎng)。PBS1 段的初始大小可以為 1~8Tq。
? PBS2 段 (PHASE SEG2)
PBS2 這是另一個(gè)相位緩沖段,也是用來(lái)補(bǔ)償邊沿階段誤差的,它的時(shí)間長(zhǎng)度在重新同步時(shí)可以縮短。PBS2 段的初始大小可以為 2~8Tq。
通訊的波特率
總線上的各個(gè)通訊節(jié)點(diǎn)只要約定好 1 個(gè) Tq 的時(shí)間長(zhǎng)度以及每一個(gè)數(shù)據(jù)位占據(jù)多少個(gè) Tq,就可以確定 CAN 通訊的波特率。
例如,假設(shè)上圖中的 1Tq=1us,而每個(gè)數(shù)據(jù)位由 19 個(gè) Tq 組成,則傳輸一位數(shù)據(jù)需要時(shí)間 T1bit=19us,從而每秒可以傳輸?shù)臄?shù)據(jù)位個(gè)數(shù)為:1x10次方/19 = 52631.6 (bps)
這個(gè)每秒可傳輸?shù)臄?shù)據(jù)位的個(gè)數(shù)即為通訊中的波特率。
同步過(guò)程分析
波特率只是約定了每個(gè)數(shù)據(jù)位的長(zhǎng)度,數(shù)據(jù)同步還涉及到相位的細(xì)節(jié),這個(gè)時(shí)候就需要用到數(shù)據(jù)位內(nèi)的 SS、PTS、PBS1 及 PBS2 段了。根據(jù)對(duì)段的應(yīng)用方式差異, CAN 的數(shù)據(jù)同步分為硬同步和重新同步。其中硬同步只是當(dāng)存在“幀起始信號(hào)”時(shí)起作用,無(wú)法確保后續(xù)一連串的位時(shí)序都是同步的,而重新同步方式可解決該問(wèn)題,這兩種方式具體介紹如下:
(1) 硬同步
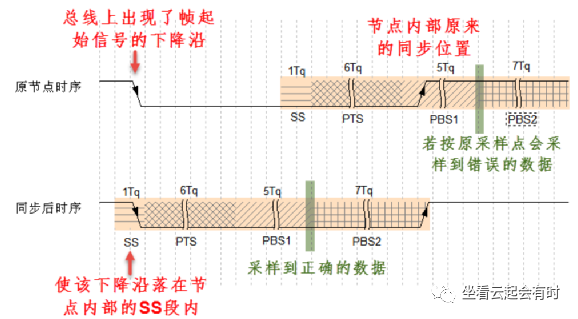
若某個(gè) CAN 節(jié)點(diǎn)通過(guò)總線發(fā)送數(shù)據(jù)時(shí),它會(huì)發(fā)送一個(gè)表示通訊起始的信號(hào) (即下一小節(jié)介紹的幀起始信號(hào)),該信號(hào)是一個(gè)由高變低的下降沿。而掛載到 CAN 總線上的通訊節(jié)點(diǎn)在不發(fā)送數(shù)據(jù)時(shí),會(huì)時(shí)刻檢測(cè)總線上的信號(hào)。見(jiàn)圖 ,可以看到當(dāng)總線出現(xiàn)幀起始信號(hào)時(shí),某節(jié)點(diǎn)檢測(cè)到總線的幀起始信號(hào)不在節(jié)點(diǎn)內(nèi)部時(shí)序的 SS 段范圍,所以判斷它自己的內(nèi)部時(shí)序與總線不同步,因而這個(gè)狀態(tài)的采樣點(diǎn)采集得的數(shù)據(jù)是不正確的。所以節(jié)點(diǎn)以硬同步的方式調(diào)整,把自己的位時(shí)序中的 SS 段平移至總線出現(xiàn)下降沿的部分,獲得同步,同步后采樣點(diǎn)就可以采集得正確數(shù)據(jù)了。
(2) 重新同步
前面的硬同步只是當(dāng)存在幀起始信號(hào)時(shí)才起作用,如果在一幀很長(zhǎng)的數(shù)據(jù)內(nèi),節(jié)點(diǎn)信號(hào)與總線信號(hào)相位有偏移時(shí),這種同步方式就無(wú)能為力了。因而需要引入重新同步方式,它利用普通數(shù)據(jù)位的高至低電平的跳變沿來(lái)同步 (幀起始信號(hào)是特殊的跳變沿)。重新同步與硬同步方式相似的地方是它們都使用 SS 段來(lái)進(jìn)行檢測(cè),同步的目的都是使節(jié)點(diǎn)內(nèi)的 SS 段把跳變沿包含起來(lái)。重新同步的方式分為超前和滯后兩種情況,以總線跳變沿與 SS 段的相對(duì)位置進(jìn)行區(qū)分。第一種相位超前的情況如圖 ,節(jié)點(diǎn)從總線的邊沿跳變中,檢測(cè)到它內(nèi)部的時(shí)序比總線的時(shí)序相對(duì)超前 2Tq,這時(shí)控制器在下一個(gè)位時(shí)序中的 PBS1 段增加 2Tq 的時(shí)間長(zhǎng)度,使得節(jié)點(diǎn)與總線時(shí)序重新同步。
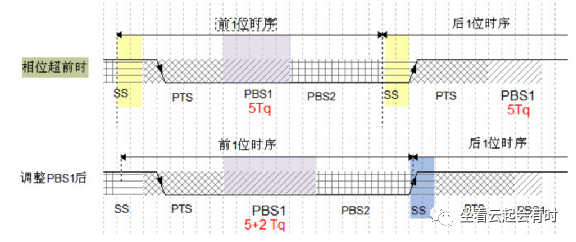
第二種相位滯后的情況如圖 ,節(jié)點(diǎn)從總線的邊沿跳變中,檢測(cè)到它的時(shí)序比總線的時(shí)序相對(duì)滯后 2Tq,這時(shí)控制器在前一個(gè)位時(shí)序中的 PBS2 段減少 2Tq 的時(shí)間長(zhǎng)度,獲得同步。
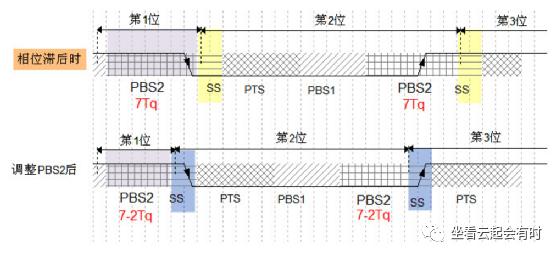
在重新同步的時(shí)候,PBS1 和 PBS2 中增加或減少的這段時(shí)間長(zhǎng)度被定義為“重新同步補(bǔ)償寬度SJW* (reSynchronization Jump Width)”。一般來(lái)說(shuō) CAN 控制器會(huì)限定 SJW 的最大值,如限定了最大 SJW=3Tq 時(shí),單次同步調(diào)整的時(shí)候不能增加或減少超過(guò) 3Tq 的時(shí)間長(zhǎng)度,若有需要,控制器會(huì)通過(guò)多次小幅度調(diào)整來(lái)實(shí)現(xiàn)同步。當(dāng)控制器設(shè)置的 SJW 極限值較大時(shí),可以吸收的誤差加大,但通訊的速度會(huì)下降
CAN 的報(bào)文種類及結(jié)構(gòu)
在 SPI 通訊中,片選、時(shí)鐘信號(hào)、數(shù)據(jù)輸入及數(shù)據(jù)輸出這 4 個(gè)信號(hào)都有單獨(dú)的信號(hào)線,I2C 協(xié)議包含有時(shí)鐘信號(hào)及數(shù)據(jù)信號(hào) 2 條信號(hào)線,異步串口包含接收與發(fā)送 2 條信號(hào)線,這些協(xié)議包含的信號(hào)都比 CAN 協(xié)議要豐富,它們能輕易進(jìn)行數(shù)據(jù)同步或區(qū)分?jǐn)?shù)據(jù)傳輸方向。而 CAN 使用的是兩條差分信號(hào)線,只能表達(dá)一個(gè)信號(hào),簡(jiǎn)潔的物理層決定了 CAN 必然要配上一套更復(fù)雜的協(xié)議,如何用一個(gè)信號(hào)通道實(shí)現(xiàn)同樣、甚至更強(qiáng)大的功能呢?CAN 協(xié)議給出的解決方案是對(duì)數(shù)據(jù)、操作命令 (如讀/寫(xiě)) 以及同步信號(hào)進(jìn)行打包,打包后的這些內(nèi)容稱為報(bào)文。
1 報(bào)文的種類
在原始數(shù)據(jù)段的前面加上傳輸起始標(biāo)簽、片選 (識(shí)別) 標(biāo)簽和控制標(biāo)簽,在數(shù)據(jù)的尾段加上 CRC校驗(yàn)標(biāo)簽、應(yīng)答標(biāo)簽和傳輸結(jié)束標(biāo)簽,把這些內(nèi)容按特定的格式打包好,就可以用一個(gè)通道表達(dá)各種信號(hào)了,各種各樣的標(biāo)簽就如同 SPI 中各種通道上的信號(hào),起到了協(xié)同傳輸?shù)淖饔谩.?dāng)整個(gè)數(shù)據(jù)包被傳輸?shù)狡渌O(shè)備時(shí),只要這些設(shè)備按格式去解讀,就能還原出原始數(shù)據(jù),這樣的報(bào)文就被稱為 CAN 的“數(shù)據(jù)幀”。
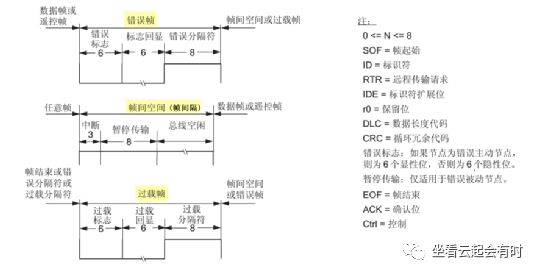
為了更有效地控制通訊,CAN 一共規(guī)定了 5 種類型的幀,它們的類型及用途說(shuō)明如表
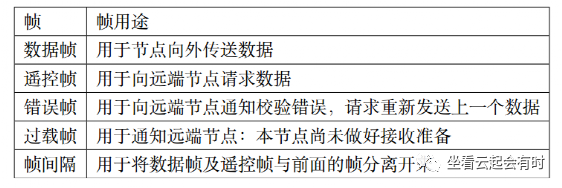
2 數(shù)據(jù)幀的結(jié)構(gòu)
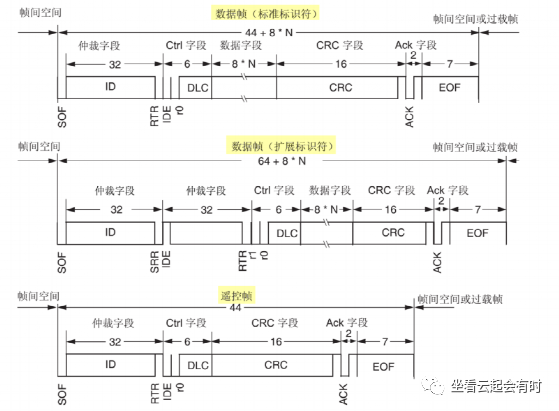
數(shù)據(jù)幀是在 CAN 通訊中最主要、最復(fù)雜的報(bào)文,我們來(lái)了解它的結(jié)構(gòu),見(jiàn)圖
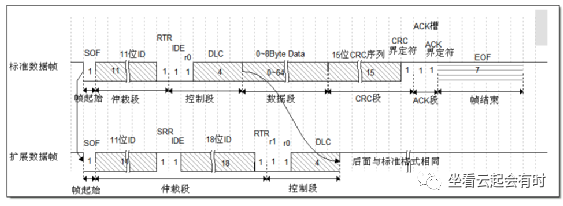
數(shù)據(jù)幀以一個(gè)顯性位 (邏輯 0) 開(kāi)始,以 7 個(gè)連續(xù)的隱性位 (邏輯 1) 結(jié)束,在它們之間,分別有仲裁段、控制段、數(shù)據(jù)段、CRC 段和 ACK 段。
? 幀起始
SOF 段 (Start OfFrame),譯為幀起始,幀起始信號(hào)只有一個(gè)數(shù)據(jù)位,是一個(gè)顯性電平,它用于通知各個(gè)節(jié)點(diǎn)將有數(shù)據(jù)傳輸,其它節(jié)點(diǎn)通過(guò)幀起始信號(hào)的電平跳變沿來(lái)進(jìn)行硬同步。
? 仲裁段
當(dāng)同時(shí)有兩個(gè)報(bào)文被發(fā)送時(shí),總線會(huì)根據(jù)仲裁段的內(nèi)容決定哪個(gè)數(shù)據(jù)包能被傳輸,這也是它名稱的由來(lái)。
仲裁段的內(nèi)容主要為本數(shù)據(jù)幀的 ID 信息 (標(biāo)識(shí)符),數(shù)據(jù)幀具有標(biāo)準(zhǔn)格式和擴(kuò)展格式兩種,區(qū)別就在于 ID 信息的長(zhǎng)度,標(biāo)準(zhǔn)格式的 ID 為 11 位,擴(kuò)展格式的 ID 為 29 位,它在標(biāo)準(zhǔn) ID 的基礎(chǔ)上多出 18 位。在 CAN 協(xié)議中, ID 起著重要的作用,它決定著數(shù)據(jù)幀發(fā)送的優(yōu)先級(jí),也決定著其它節(jié)點(diǎn)是否會(huì)接收這個(gè)數(shù)據(jù)幀。
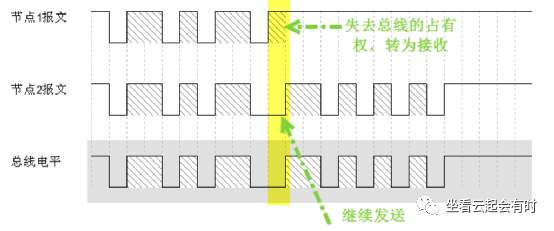
CAN 協(xié)議不對(duì)掛載在它之上的節(jié)點(diǎn)分配優(yōu)先級(jí)和地址,對(duì)總線的占有權(quán)是由信息的重要性決定的,即對(duì)于重要的信息,我們會(huì)給它打包上一個(gè)優(yōu)先級(jí)高的 ID,使它能夠及時(shí)地發(fā)送出去。也正因?yàn)樗@樣的優(yōu)先級(jí)分配原則,使得 CAN 的擴(kuò)展性大大加強(qiáng),在總線上增加或減少節(jié)點(diǎn)并不影響其它設(shè)備。報(bào)文的優(yōu)先級(jí),是通過(guò)對(duì) ID 的仲裁來(lái)確定的。根據(jù)前面對(duì)物理層的分析我們知道如果總線上同時(shí)出現(xiàn)顯性電平和隱性電平,總線的狀態(tài)會(huì)被置為顯性電平,CAN 正是利用這個(gè)特性進(jìn)行仲裁。
若兩個(gè)節(jié)點(diǎn)同時(shí)競(jìng)爭(zhēng) CAN 總線的占有權(quán),當(dāng)它們發(fā)送報(bào)文時(shí),若首先出現(xiàn)隱性電平,則會(huì)失去對(duì)總線的占有權(quán),進(jìn)入接收狀態(tài)。見(jiàn)圖 ,在開(kāi)始階段,兩個(gè)設(shè)備發(fā)送的電平一樣,所以它們一直繼續(xù)發(fā)送數(shù)據(jù)。到了圖中箭頭所指的時(shí)序處,節(jié)點(diǎn)單元 1 發(fā)送的為隱性電平,而此時(shí)節(jié)點(diǎn)單元 2 發(fā)送的為顯性電平,由于總線的“線與”特性使它表達(dá)出顯示電平,因此單元 2 競(jìng)爭(zhēng)總線成功,這個(gè)報(bào)文得以被繼續(xù)發(fā)送出去。
仲裁段 ID 的優(yōu)先級(jí)也影響著接收設(shè)備對(duì)報(bào)文的反應(yīng)。因?yàn)樵?CAN 總線上數(shù)據(jù)是以廣播的形式發(fā)送的,所有連接在 CAN 總線的節(jié)點(diǎn)都會(huì)收到所有其它節(jié)點(diǎn)發(fā)出的有效數(shù)據(jù),因而我們的 CAN
控制器大多具有根據(jù) ID 過(guò)濾報(bào)文的功能,它可以控制自己只接收某些 ID 的報(bào)文。回看數(shù)據(jù)幀格式,可看到仲裁段除了報(bào)文 ID 外,還有 RTR、IDE 和 SRR 位。
(1) RTR 位 (Remote Transmission Request Bit),譯作遠(yuǎn)程傳輸請(qǐng)求位,它是用于區(qū)分?jǐn)?shù)據(jù)幀和遙控幀的,當(dāng)它為顯性電平時(shí)表示數(shù)據(jù)幀,隱性電平時(shí)表示遙控幀。
(2) IDE 位 (Identifier ExtensionBit),譯作標(biāo)識(shí)符擴(kuò)展位,它是用于區(qū)分標(biāo)準(zhǔn)格式與擴(kuò)展格式,當(dāng)它為顯性電平時(shí)表示標(biāo)準(zhǔn)格式,隱性電平時(shí)表示擴(kuò)展格式。
(3) SRR 位 (Substitute Remote Request Bit),只存在于擴(kuò)展格式,它用于替代標(biāo)準(zhǔn)格式中的 RTR位。由于擴(kuò)展幀中的 SRR 位為隱性位,RTR 在數(shù)據(jù)幀為顯性位,所以在兩個(gè) ID 相同的標(biāo)準(zhǔn)格式報(bào)文與擴(kuò)展格式報(bào)文中,標(biāo)準(zhǔn)格式的優(yōu)先級(jí)較高。
? 控制段
在控制段中的 r1 和 r0 為保留位,默認(rèn)設(shè)置為顯性位。它最主要的是 DLC 段 (Data Length Code),譯為數(shù)據(jù)長(zhǎng)度碼,它由 4 個(gè)數(shù)據(jù)位組成,用于表示本報(bào)文中的數(shù)據(jù)段含有多少個(gè)字節(jié), DLC 段表示的數(shù)字為 0~8。
? 數(shù)據(jù)段
數(shù)據(jù)段為數(shù)據(jù)幀的核心內(nèi)容,它是節(jié)點(diǎn)要發(fā)送的原始信息,由 0~8 個(gè)字節(jié)組成,MSB 先行。
? CRC 段
為了保證報(bào)文的正確傳輸,CAN 的報(bào)文包含了一段 15 位的 CRC 校驗(yàn)碼,一旦接收節(jié)點(diǎn)算出的CRC 碼跟接收到的 CRC 碼不同,則它會(huì)向發(fā)送節(jié)點(diǎn)反饋出錯(cuò)信息,利用錯(cuò)誤幀請(qǐng)求它重新發(fā)送。CRC 部分的計(jì)算一般由 CAN 控制器硬件完成,出錯(cuò)時(shí)的處理則由軟件控制最大重發(fā)數(shù)。在 CRC 校驗(yàn)碼之后,有一個(gè) CRC 界定符,它為隱性位,主要作用是把 CRC 校驗(yàn)碼與后面的 ACK段間隔起來(lái)。
? ACK 段
ACK 段包括一個(gè) ACK 槽位,和 ACK 界定符位。類似 I2C 總線,在 ACK 槽位中,發(fā)送節(jié)點(diǎn)發(fā)送的是隱性位,而接收節(jié)點(diǎn)則在這一位中發(fā)送顯性位以示應(yīng)答。在 ACK 槽和幀結(jié)束之間由 ACK 界定符間隔開(kāi)。
? 幀結(jié)束
EOF 段 (End Of Frame),譯為幀結(jié)束,幀結(jié)束段由發(fā)送節(jié)點(diǎn)發(fā)送的 7 個(gè)隱性位表示結(jié)束。
3 其它報(bào)文的結(jié)構(gòu)
 ?? ? ? ? ?
?? ? ? ? ? ?? ? ? ? ?
?? ? ? ? ?
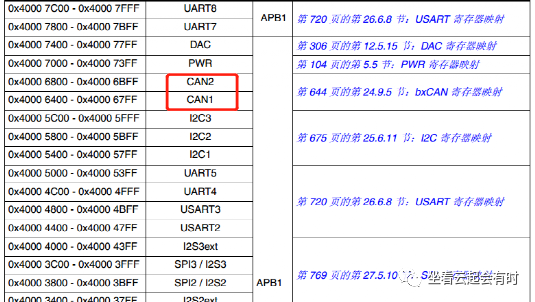
2STM32 CAN控制器介紹
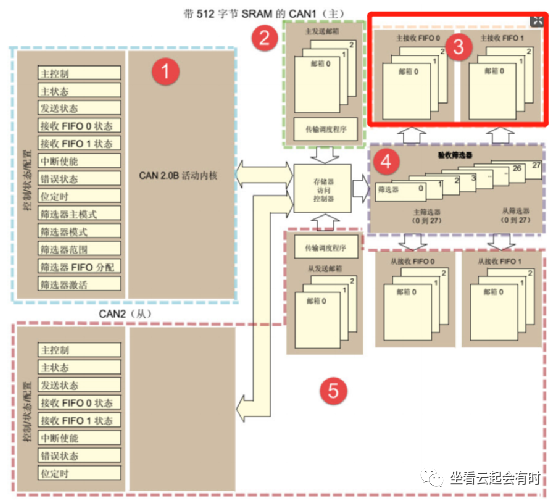
STM32 的芯片中具有 bxCAN 控制器 (Basic Extended CAN),它支持 CAN 協(xié)議 2.0A 和 2.0B 標(biāo)準(zhǔn)。該 CAN 控制器支持最高的通訊速率為 1Mb/s;可以自動(dòng)地接收和發(fā)送 CAN 報(bào)文,支持使用標(biāo)準(zhǔn)ID 和擴(kuò)展 ID 的報(bào)文;外設(shè)中具有 3 個(gè)發(fā)送郵箱,發(fā)送報(bào)文的優(yōu)先級(jí)可以使用軟件控制,還可以記錄發(fā)送的時(shí)間;具有 2 個(gè) 3 級(jí)深度的接收 FIFO,可使用過(guò)濾功能只接收或不接收某些 ID 號(hào)的報(bào)文;可配置成自動(dòng)重發(fā);不支持使用 DMA 進(jìn)行數(shù)據(jù)收發(fā)。框架示意圖如下:

STM32 的有兩組 CAN 控制器,其中 CAN1 是主設(shè)備,框圖中的“存儲(chǔ)訪問(wèn)控制器”是由 CAN1控制的,CAN2 無(wú)法直接訪問(wèn)存儲(chǔ)區(qū)域,所以使用 CAN2 的時(shí)候必須使能 CAN1 外設(shè)的時(shí)鐘。框圖中主要包含 CAN 控制內(nèi)核、發(fā)送郵箱、接收 FIFO 以及驗(yàn)收篩選器,下面對(duì)框圖中的各個(gè)部分進(jìn)行介紹。
2.1 CAN 控制內(nèi)核
框圖中標(biāo)號(hào)處的 CAN 控制內(nèi)核包含了各種控制寄存器及狀態(tài)寄存器,我們主要講解其中的主控制寄存器 CAN_MCR 及位時(shí)序寄存器 CAN_BTR。
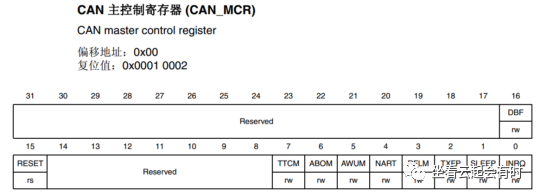
2.1.1 主控制寄存器 CAN_MCR
主控制寄存器 CAN_MCR 負(fù)責(zé)管理 CAN 的工作模式,它使用以下寄存器位實(shí)現(xiàn)控制。
(1) DBF 調(diào)試凍結(jié)功能
DBF(Debug freeze) 調(diào)試凍結(jié),使用它可設(shè)置 CAN 處于工作狀態(tài)或禁止收發(fā)的狀態(tài),禁止收發(fā)時(shí)仍可訪問(wèn)接收 FIFO 中的數(shù)據(jù)。這兩種狀態(tài)是當(dāng) STM32 芯片處于程序調(diào)試模式時(shí)才使用的,平時(shí)使用并不影響。
(2) TTCM 時(shí)間觸發(fā)模式
TTCM(Time triggered communication mode) 時(shí)間觸發(fā)模式,它用于配置 CAN 的時(shí)間觸發(fā)通信模式,在此模式下,CAN 使用它內(nèi)部定時(shí)器產(chǎn)生時(shí)間戳,并把它保存在CAN_RDTxR、CAN_TDTxR 寄存器中。內(nèi)部定時(shí)器在每個(gè) CAN 位時(shí)間累加,在接收和發(fā)送的幀起始位被采樣,并生成時(shí)間戳。利用它可以實(shí)現(xiàn) ISO 11898-4 CAN 標(biāo)準(zhǔn)的分時(shí)同步通信功能。
(3) ABOM 自動(dòng)離線管理
ABOM (Automatic bus-off management) 自動(dòng)離線管理,它用于設(shè)置是否使用自動(dòng)離線管理功能。當(dāng)節(jié)點(diǎn)檢測(cè)到它發(fā)送錯(cuò)誤或接收錯(cuò)誤超過(guò)一定值時(shí),會(huì)自動(dòng)進(jìn)入離線狀態(tài),在離線狀態(tài)中, CAN 不能接收或發(fā)送報(bào)文。處于離線狀態(tài)的時(shí)候,可以軟件控制恢復(fù)或者直接使用這個(gè)自動(dòng)離線管理功能,它會(huì)在適當(dāng)?shù)臅r(shí)候自動(dòng)恢復(fù)。
(4) AWUM 自動(dòng)喚醒
AWUM (Automatic bus-off management),自動(dòng)喚醒功能,CAN 外設(shè)可以使用軟件進(jìn)入低功耗的睡眠模式,如果使能了這個(gè)自動(dòng)喚醒功能,當(dāng) CAN 檢測(cè)到總線活動(dòng)的時(shí)候,會(huì)自動(dòng)喚醒。
(5) NART 自動(dòng)重傳
NART(No automatic retransmission) 報(bào)文自動(dòng)重傳功能,設(shè)置這個(gè)功能后,當(dāng)報(bào)文發(fā)送失敗時(shí)會(huì)自動(dòng)重傳至成功為止。若不使用這個(gè)功能,無(wú)論發(fā)送結(jié)果如何,消息只發(fā)送一次。
(6) RFLM 鎖定模式
RFLM(Receive FIFO locked mode)FIFO 鎖定模式,該功能用于鎖定接收 FIFO 。鎖定后,當(dāng)接收 FIFO 溢出時(shí),會(huì)丟棄下一個(gè)接收的報(bào)文。若不鎖定,則下一個(gè)接收到的報(bào)文會(huì)覆蓋原報(bào)文。
(7) TXFP 報(bào)文發(fā)送優(yōu)先級(jí)的判定方法
TXFP(Transmit FIFO priority) 報(bào)文發(fā)送優(yōu)先級(jí)的判定方法,當(dāng) CAN 外設(shè)的發(fā)送郵箱中有多個(gè)待發(fā)送報(bào)文時(shí),本功能可以控制它是根據(jù)報(bào)文的 ID 優(yōu)先級(jí)還是報(bào)文存進(jìn)郵箱的順序來(lái)發(fā)送。
2.1.2 位時(shí)序寄存器 (CAN_BTR) 及波特率
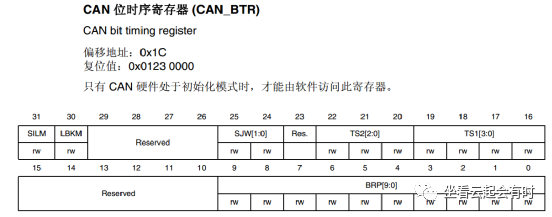
CAN 外設(shè)中的位時(shí)序寄存器 CAN_BTR 用于配置測(cè)試模式、波特率以及各種位內(nèi)的段參數(shù)。
2.1.2.1 模式
位31 SILM:靜默模式(調(diào)試)(Silent mode (debug))
0:正常工作
1:靜默模式
位30 LBKM:環(huán)回模式(調(diào)試)(Loop back mode (debug))
0:禁止環(huán)回模式
1:使能環(huán)回模式
為方便調(diào)試,STM32 的 CAN 提供了測(cè)試模式,配置位時(shí)序寄存器 CAN_BTR 的 SILM 及 LBKM寄存器位可以控制使用正常模式、靜默模式、回環(huán)模式及靜默回環(huán)模式,見(jiàn)圖。
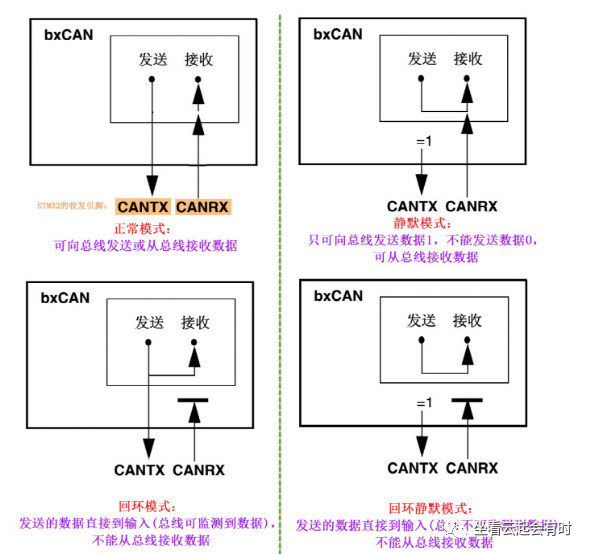
各個(gè)工作模式介紹如下:
? 正常模式
正常模式下就是一個(gè)正常的 CAN 節(jié)點(diǎn),可以向總線發(fā)送數(shù)據(jù)和接收數(shù)據(jù)。
? 靜默模式
靜默模式下,它自己的輸出端的邏輯 0 數(shù)據(jù)會(huì)直接傳輸?shù)剿约旱妮斎攵耍壿?1 可以被發(fā)送到總線,所以它不能向總線發(fā)送顯性位 (邏輯 0),只能發(fā)送隱性位 (邏輯 1)。輸入端可以從總線接收內(nèi)容。由于它只可發(fā)送的隱性位不會(huì)強(qiáng)制影響總線的狀態(tài),所以把它稱為靜默模式。這種模式一般用于監(jiān)測(cè),它可以用于分析總線上的流量,但又不會(huì)因?yàn)榘l(fā)送顯性位而影響總線。
? 回環(huán)模式
回環(huán)模式下,它自己的輸出端的所有內(nèi)容都直接傳輸?shù)阶约旱妮斎攵耍敵龆说膬?nèi)容同時(shí)也會(huì)被傳輸?shù)娇偩€上,即也可使用總線監(jiān)測(cè)它的發(fā)送內(nèi)容。輸入端只接收自己發(fā)送端的內(nèi)容,不接收來(lái)自總線上的內(nèi)容。使用回環(huán)模式可以進(jìn)行自檢。
? 回環(huán)靜默模式
回環(huán)靜默模式是以上兩種模式的結(jié)合,自己的輸出端的所有內(nèi)容都直接傳輸?shù)阶约旱妮斎攵耍⑶也粫?huì)向總線發(fā)送顯性位影響總線,不能通過(guò)總線監(jiān)測(cè)它的發(fā)送內(nèi)容。輸入端只接收自己發(fā)送端的內(nèi)容,不接收來(lái)自總線上的內(nèi)容。這種方式可以在“熱自檢”時(shí)使用,即自我檢查的時(shí)候,不會(huì)干擾總線。
以上說(shuō)的各個(gè)模式,是不需要修改硬件接線的,例如,當(dāng)輸出直接連輸入時(shí),它是在 STM32 芯片內(nèi)部連接的,傳輸路徑不經(jīng)過(guò) STM32 的 CAN_Tx/Rx 引腳,更不經(jīng)過(guò)外部連接的 CAN 收發(fā)器,只有輸出數(shù)據(jù)到總線或從總線接收的情況下才會(huì)經(jīng)過(guò) CAN_Tx/Rx 引腳和收發(fā)器
2.1.2.2 位時(shí)序及波特率
STM32 外設(shè)定義的位時(shí)序與我們前面解釋的 CAN 標(biāo)準(zhǔn)時(shí)序有一點(diǎn)區(qū)別,見(jiàn)圖
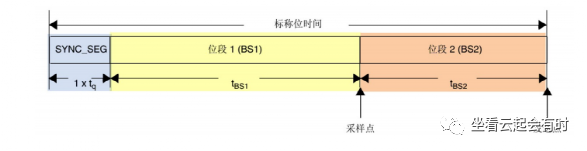
STM32 的 CAN 外設(shè)位時(shí)序中只包含 3 段,分別是同步段 SYNC_SEG、位段 BS1 及位段 BS2,采樣點(diǎn)位于 BS1 及 BS2 段的交界處。其中 SYNC_SEG 段固定長(zhǎng)度為 1Tq,而 BS1 及 BS2 段可以
在位時(shí)序寄存器 CAN_BTR 設(shè)置它們的時(shí)間長(zhǎng)度,它們可以在重新同步期間增長(zhǎng)或縮短,該長(zhǎng)度SJW 也可在位時(shí)序寄存器中配置。
理解 STM32 的 CAN 外設(shè)的位時(shí)序時(shí),可以把它的 BS1 段理解為是由前面介紹的 CAN 標(biāo)準(zhǔn)協(xié)議中 PTS 段與 PBS1 段合在一起的,而 BS2 段就相當(dāng)于 PBS2 段。
了解位時(shí)序后,我們就可以配置波特率了。通過(guò)配置位時(shí)序寄存器 CAN_BTR 的 TS1[3:0] 及
TS2[2:0] 寄存器位設(shè)定 BS1 及 BS2 段的長(zhǎng)度后,我們就可以確定每個(gè) CAN 數(shù)據(jù)位的時(shí)間:
BS1 段時(shí)間:TS1=Tq x (TS1[3:0] + 1),
BS2 段時(shí)間:TS2= Tq x (TS2[2:0] + 1),
一個(gè)數(shù)據(jù)位的時(shí)間:T1bit =1Tq+TS1+TS2=1+ (TS1[3:0] + 1)+ (TS2[2:0] + 1)= N Tq
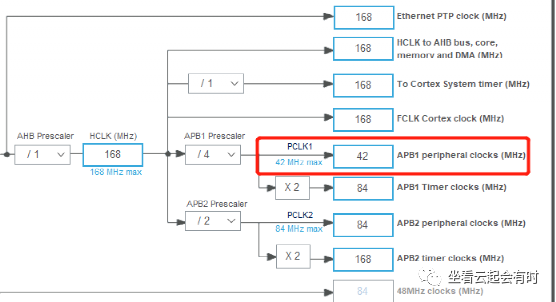
其中單個(gè)時(shí)間片的長(zhǎng)度 Tq 與 CAN 外設(shè)的所掛載的時(shí)鐘總線及分頻器配置有關(guān),CAN1 和 CAN2外設(shè)都是掛載在 APB1 總線上的,而位時(shí)序寄存器 CAN_BTR 中的 BRP[9:0] 寄存器位可以設(shè)置
CAN波特率=Fpclk1/((CAN_BS1+CAN_BS2+1)*CAN_Prescaler)
其中clk為42M!
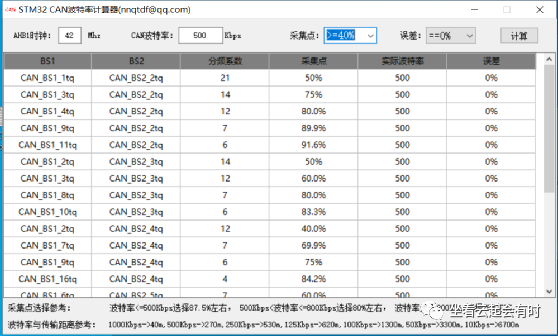
推薦一個(gè)CAN波特率計(jì)算器
2.2 CAN 發(fā)送郵箱
回到圖 中的 CAN 外設(shè)框圖,在標(biāo)號(hào)處的是 CAN 外設(shè)的發(fā)送郵箱,它一共有 3 個(gè)發(fā)送郵箱,即最多可以緩存 3 個(gè)待發(fā)送的報(bào)文。每個(gè)發(fā)送郵箱中包含有標(biāo)識(shí)符寄存器 CAN_TIxR、數(shù)據(jù)長(zhǎng)度控制寄存器 CAN_TDTxR 及 2 個(gè)數(shù)據(jù)寄存器 CAN_TDLxR、CAN_TDHxR,它們的功能見(jiàn)表
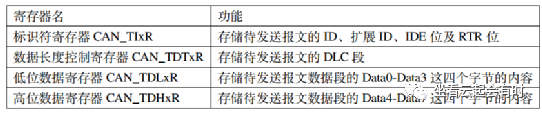
當(dāng)我們要使用 CAN 外設(shè)發(fā)送報(bào)文時(shí),把報(bào)文的各個(gè)段分解,按位置寫(xiě)入到這些寄存器中,并對(duì)標(biāo)識(shí)符寄存器 CAN_TIxR 中的發(fā)送請(qǐng)求寄存器位 TMIDxR_TXRQ 置 1,即可把數(shù)據(jù)發(fā)送出去。其中標(biāo)識(shí)符寄存器 CAN_TIxR 中的 STDID 寄存器位比較特別。我們知道 CAN 的標(biāo)準(zhǔn)標(biāo)識(shí)符的總位數(shù)為 11 位,而擴(kuò)展標(biāo)識(shí)符的總位數(shù)為 29 位的。當(dāng)報(bào)文使用擴(kuò)展標(biāo)識(shí)符的時(shí)候,標(biāo)識(shí)符寄存器 CAN_TIxR 中的 STDID[10:0] 等效于 EXTID[18:28] 位,它與 EXTID[17:0] 共同組成完整的 29位擴(kuò)展標(biāo)識(shí)符。
2.3 CAN 接收 FIFO
圖 中的 CAN 外設(shè)框圖,在標(biāo)號(hào)處的是 CAN 外設(shè)的接收 FIFO,它一共有 2 個(gè)接收 FIFO,每個(gè) FIFO 中有 3 個(gè)郵箱,即最多可以緩存 6 個(gè)接收到的報(bào)文。當(dāng)接收到報(bào)文時(shí),F(xiàn)IFO 的報(bào)文計(jì)數(shù)器會(huì)自增,而 STM32 內(nèi)部讀取 FIFO 數(shù)據(jù)之后,報(bào)文計(jì)數(shù)器會(huì)自減,我們通過(guò)狀態(tài)寄存器可獲知報(bào)文計(jì)數(shù)器的值,而通過(guò)前面主控制寄存器的 RFLM 位,可設(shè)置鎖定模式,鎖定模式下 FIFO溢出時(shí)會(huì)丟棄新報(bào)文,非鎖定模式下 FIFO 溢出時(shí)新報(bào)文會(huì)覆蓋舊報(bào)文。跟發(fā)送郵箱類似,每個(gè)接收 FIFO 中包含有標(biāo)識(shí)符寄存器 CAN_RIxR、數(shù)據(jù)長(zhǎng)度控制寄存器CAN_RDTxR 及 2 個(gè)數(shù)據(jù)寄存器 CAN_RDLxR、CAN_RDHxR,它們的功能見(jiàn)表。
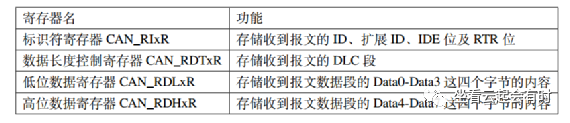
通過(guò)中斷或狀態(tài)寄存器知道接收 FIFO 有數(shù)據(jù)后,我們?cè)僮x取這些寄存器的值即可把接收到的報(bào)文加載到 STM32 的內(nèi)存中
2.4 驗(yàn)收篩選器
圖 中的 CAN 外設(shè)框圖,在標(biāo)號(hào)處的是 CAN 外設(shè)的驗(yàn)收篩選器,一共有 28 個(gè)篩選器組,每個(gè)篩選器組有 2 個(gè)寄存器,CAN1 和 CAN2 共用的篩選器的。在 CAN 協(xié)議中,消息的標(biāo)識(shí)符與節(jié)點(diǎn)地址無(wú)關(guān),但與消息內(nèi)容有關(guān)。因此,發(fā)送節(jié)點(diǎn)將報(bào)文廣播給所有接收器時(shí),接收節(jié)點(diǎn)會(huì)根據(jù)報(bào)文標(biāo)識(shí)符的值來(lái)確定軟件是否需要該消息,為了簡(jiǎn)化軟件的工作,STM32 的 CAN 外設(shè)接收?qǐng)?bào)文前會(huì)先使用驗(yàn)收篩選器檢查,只接收需要的報(bào)文到 FIFO中。
篩選器工作的時(shí)候,可以調(diào)整篩選 ID 的長(zhǎng)度及過(guò)濾模式。根據(jù)篩選 ID 長(zhǎng)度來(lái)分類有有以下兩種:
(1) 檢查 STDID[10:0]、EXTID[17:0]、IDE 和 RTR 位,一共 31 位。
(2) 檢查 STDID[10:0]、RTR、IDE 和 EXTID[17:15],一共 16 位。
通過(guò)配置篩選尺度寄存器 CAN_FS1R 的 FSCx 位可以設(shè)置篩選器工作在哪個(gè)尺度。而根據(jù)過(guò)濾的方法分為以下兩種模式:
(1) 標(biāo)識(shí)符列表模式,它把要接收?qǐng)?bào)文的 ID 列成一個(gè)表,要求報(bào)文 ID 與列表中的某一個(gè)標(biāo)識(shí)符完全相同才可以接收,可以理解為白名單管理。
(2) 掩碼模式,它把可接收?qǐng)?bào)文 ID 的某幾位作為列表,這幾位被稱為掩碼,可以把它理解成關(guān)鍵字搜索,只要掩碼 (關(guān)鍵字) 相同,就符合要求,報(bào)文就會(huì)被保存到接收 FIFO。通過(guò)配置篩選模式寄存器 CAN_FM1R 的 FBMx 位可以設(shè)置篩選器工作在哪個(gè)模式。不同的尺度和不同的過(guò)濾方法可使篩選器工作在圖 的 4 種狀態(tài)。
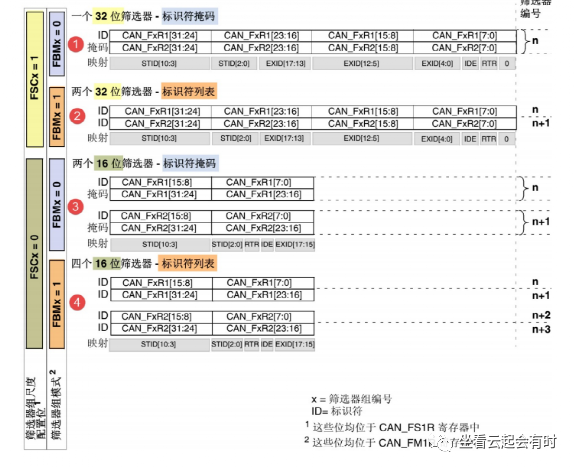
每組篩選器包含 2 個(gè) 32 位的寄存器,分別為 CAN_FxR1 和 CAN_FxR2,它們用來(lái)存儲(chǔ)要篩選的ID 或掩碼,各個(gè)寄存器位代表的意義與圖中兩個(gè)寄存器下面“映射”的一欄一致,各個(gè)模式的說(shuō)明見(jiàn)表。
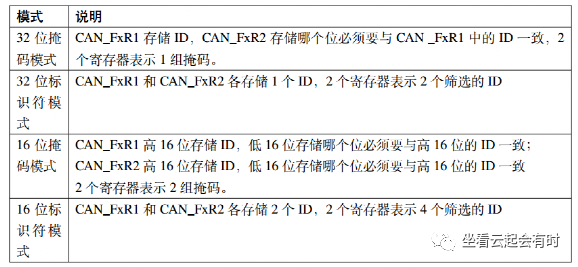
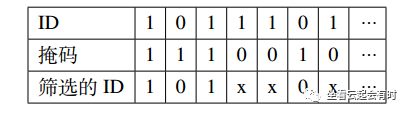
例如下面的表格所示,在掩碼模式時(shí),第一個(gè)寄存器存儲(chǔ)要篩選的 ID,第二個(gè)寄存器存儲(chǔ)掩碼,掩碼為 1 的部分表示該位必須與 ID 中的內(nèi)容一致,篩選的結(jié)果為表中第三行的 ID 值,它是一組包含多個(gè)的 ID 值,其中 x 表示該位可以為 1 可以為 0。
而工作在標(biāo)識(shí)符模式時(shí),2 個(gè)寄存器存儲(chǔ)的都是要篩選的 ID,它只包含 2 個(gè)要篩選的 ID 值 (32位模式時(shí))。
如果使能了篩選器,且報(bào)文的 ID 與所有篩選器的配置都不匹配,CAN 外設(shè)會(huì)丟棄該報(bào)文,不存入接收 FIFO。
2.5 整體控制邏輯
回到圖 結(jié)構(gòu)框圖,圖中的標(biāo)號(hào)處表示的是 CAN2 外設(shè)的結(jié)構(gòu),它與 CAN1 外設(shè)是一樣的,他們共用篩選器且由于存儲(chǔ)訪問(wèn)控制器由 CAN1 控制,所以要使用 CAN2 的時(shí)候必須要使能CAN1 的時(shí)鐘。其中 STM32F103 系列芯片不具有 CAN2 控制器。
2.6 STM32 HAL庫(kù)代碼邏輯
2.6.1 初始化
注意:網(wǎng)絡(luò)上基本上用的很久的HAL庫(kù),我們采用很新的1.25.2,最新的庫(kù)還是差異挺大的!
從 STM32 的 CAN 外設(shè)我們了解到它的功能非常多,控制涉及的寄存器也非常豐富,而使用STM32 HAL 庫(kù)提供的各種結(jié)構(gòu)體及庫(kù)函數(shù)可以簡(jiǎn)化這些控制過(guò)程。跟其它外設(shè)一樣,STM32
HAL 庫(kù)提供了 CAN 初始化結(jié)構(gòu)體及初始化函數(shù)來(lái)控制 CAN 的工作方式,提供了收發(fā)報(bào)文使用的結(jié)構(gòu)體及收發(fā)函數(shù),還有配置控制篩選器模式及 ID 的結(jié)構(gòu)體。這些內(nèi)容都定義在庫(kù)文件“STM32F4xx_hal_can.h”及“STM32F4xx_hal_can.c”中,編程時(shí)我們可以結(jié)合這兩個(gè)文件內(nèi)的注釋使用或參考庫(kù)幫助文檔。首先我們來(lái)學(xué)習(xí)初始化結(jié)構(gòu)體的內(nèi)容,見(jiàn)代碼清單 1。代碼清單 CAN 初始化結(jié)構(gòu)
typedefstruct
{
uint32_tPrescaler;/*配置CAN外設(shè)的時(shí)鐘分頻,可設(shè)置為1-1024*/
uint32_tMode;/*配置CAN的工作模式,回環(huán)或正常模式*/
uint32_tSyncJumpWidth;/*配置SJW極限值*/
uint32_tTimeSeg1;/*配置BS1段長(zhǎng)度*/
uint32_tTimeSeg2;/*配置BS2段長(zhǎng)度*/
FunctionalStateTimeTriggeredMode;/*是否使能TTCM時(shí)間觸發(fā)功能*/
FunctionalStateAutoBusOff;/*是否使能ABOM自動(dòng)離線管理功能*/
FunctionalStateAutoWakeUp;/*是否使能AWUM自動(dòng)喚醒功能*/
FunctionalStateAutoRetransmission;/*是否使能NART自動(dòng)重傳功能*/
FunctionalStateReceiveFifoLocked;/*是否使能RFLM鎖定FIFO功能*/
FunctionalStateTransmitFifoPriority;/*配置TXFP報(bào)文優(yōu)先級(jí)的判定方法*/
}CAN_InitTypeDef;
體這些結(jié)構(gòu)體成員說(shuō)明如下,其中括號(hào)內(nèi)的文字是對(duì)應(yīng)參數(shù)在 STM32 HAL 庫(kù)中定義的宏
(1) Prescaler
本成員設(shè)置 CAN 外設(shè)的時(shí)鐘分頻,它可控制時(shí)間片 Tq 的時(shí)間長(zhǎng)度,這里設(shè)置的值最終會(huì)減 1 后再寫(xiě)入 BRP 寄存器位,即前面介紹的 Tq 計(jì)算公式:
Tq = (BRP[9:0]+1) x TPCLK
等效于:Tq = CAN_Prescaler x TPCLK
(2) Mode
本成員設(shè)置 CAN 的工作模式,可設(shè)置為正常模式 (CAN_MODE_NORMAL)、回環(huán)模式 (CAN_MODE_LOOPBACK)、靜默模式 (CAN_MODE_SILENT) 以及回環(huán)靜默模式(CAN_MODE_SILENT_LOOPBACK)。
(3) SyncJumpWidth
本成員可以配置 SJW 的極限長(zhǎng)度,即 CAN 重新同步時(shí)單次可增加或縮短的最大長(zhǎng)度,它可以被配置為 1-4Tq(CAN_SJW_1/2/3/4tq)。
(4) TimeSeg1
本成員用于設(shè)置 CAN 位時(shí)序中的 BS1 段的長(zhǎng)度,它可以被配置為 1-16 個(gè) Tq 長(zhǎng)度(CAN_BS1_1/2/3…16tq)。
(5) TimeSeg2
本成員用于設(shè)置 CAN 位時(shí)序中的 BS2 段的長(zhǎng)度,它可以被配置為 1-8 個(gè) Tq 長(zhǎng)度(CAN_BS2_1/2/3…8tq)。SYNC_SEG、 BS1 段及 BS2 段的長(zhǎng)度加起來(lái)即一個(gè)數(shù)據(jù)位的長(zhǎng)度,即前面介紹的原來(lái)
計(jì)算公式:T1bit =1Tq+TS1+TS2=1+ (TS1[3:0] + 1)+ (TS2[2:0] + 1)
等效于:T1bit= 1Tq+CAN_BS1+CAN_BS2
(6) TimeTriggeredMode
本成員用于設(shè)置是否使用時(shí)間觸發(fā)功能 (ENABLE/DISABLE),時(shí)間觸發(fā)功能在某些CAN 標(biāo)準(zhǔn)中會(huì)使用到。
(7) AutoBusOff
本成員用于設(shè)置是否使用自動(dòng)離線管理 (ENABLE/DISABLE),使用自動(dòng)離線管理可以在節(jié)點(diǎn)出錯(cuò)離線后適時(shí)自動(dòng)恢復(fù),不需要軟件干預(yù)。
(8) AutoWakeUp
本成員用于設(shè)置是否使用自動(dòng)喚醒功能 (ENABLE/DISABLE),使能自動(dòng)喚醒功能后它會(huì)在監(jiān)測(cè)到總線活動(dòng)后自動(dòng)喚醒。
(9) AutoWakeUp
本成員用于設(shè)置是否使用自動(dòng)離線管理功能 (ENABLE/DISABLE),使用自動(dòng)離線管理可以在出錯(cuò)時(shí)離線后適時(shí)自動(dòng)恢復(fù),不需要軟件干預(yù)。
(10) AutoRetransmission
本成員用于設(shè)置是否使用自動(dòng)重傳功能 (ENABLE/DISABLE),使用自動(dòng)重傳功能時(shí),會(huì)一直發(fā)送報(bào)文直到成功為止。
(11) ReceiveFifoLocked
本成員用于設(shè)置是否使用鎖定接收 FIFO(ENABLE/DISABLE),鎖定接收 FIFO 后,若FIFO 溢出時(shí)會(huì)丟棄新數(shù)據(jù),否則在 FIFO 溢出時(shí)以新數(shù)據(jù)覆蓋舊數(shù)據(jù)。
(12) TransmitFifoPriority
本成員用于設(shè)置發(fā)送報(bào)文的優(yōu)先級(jí)判定方法 (ENABLE/DISABLE),使能時(shí),以報(bào)文存入發(fā)送郵箱的先后順序來(lái)發(fā)送,否則按照?qǐng)?bào)文 ID 的優(yōu)先級(jí)來(lái)發(fā)送。配置完這些結(jié)構(gòu)體成員后,我們調(diào)用庫(kù)函數(shù) HAL_CAN_Init 即可把這些參數(shù)寫(xiě)入到 CAN 控制寄存器中,實(shí)現(xiàn) CAN 的初始化
2.6.2 CAN 發(fā)送及接收結(jié)構(gòu)體
在發(fā)送或接收?qǐng)?bào)文時(shí),需要往發(fā)送郵箱中寫(xiě)入報(bào)文信息或從接收 FIFO 中讀取報(bào)文信息,利用STM32HAL 庫(kù)的發(fā)送及接收結(jié)構(gòu)體可以方便地完成這樣的工作,它們的定義見(jiàn)代碼清單 。代碼清單 39?2 CAN 發(fā)送及接收結(jié)構(gòu)體
typedefstruct
{
uint32_tStdId;/*存儲(chǔ)報(bào)文的標(biāo)準(zhǔn)標(biāo)識(shí)符11位,0-0x7FF.*/
uint32_tExtId;/*存儲(chǔ)報(bào)文的擴(kuò)展標(biāo)識(shí)符29位,0-0x1FFFFFFF.*/
uint32_tIDE;/*存儲(chǔ)IDE擴(kuò)展標(biāo)志*/
uint32_tRTR;/*存儲(chǔ)RTR遠(yuǎn)程幀標(biāo)志*/
uint32_tDLC;/*存儲(chǔ)報(bào)文數(shù)據(jù)段的長(zhǎng)度,0-8*/
FunctionalStateTransmitGlobalTime;
}CAN_TxHeaderTypeDef;
typedefstruct
{
uint32_tStdId;/*存儲(chǔ)報(bào)文的標(biāo)準(zhǔn)標(biāo)識(shí)符11位,0-0x7FF.*/
uint32_tExtId;/*存儲(chǔ)報(bào)文的擴(kuò)展標(biāo)識(shí)符29位,0-0x1FFFFFFF.*/
uint32_tIDE;/*存儲(chǔ)IDE擴(kuò)展標(biāo)志*/
uint32_tRTR;/*存儲(chǔ)RTR遠(yuǎn)程幀標(biāo)志*/
uint32_tDLC;/*存儲(chǔ)報(bào)文數(shù)據(jù)段的長(zhǎng)度,0-8*/
uint32_tTimestamp;
uint32_tFilterMatchIndex;
}CAN_RxHeaderTypeDef;
這些結(jié)構(gòu)體成員, 說(shuō)明如下:
(1) StdId
本成員存儲(chǔ)的是報(bào)文的 11 位標(biāo)準(zhǔn)標(biāo)識(shí)符,范圍是 0-0x7FF。
(2) ExtId
本成員存儲(chǔ)的是報(bào)文的 29 位擴(kuò)展標(biāo)識(shí)符,范圍是 0-0x1FFFFFFF。ExtId 與 StdId 這兩個(gè)成員根據(jù)下面的 IDE 位配置,只有一個(gè)是有效的。
(3) IDE
本成員存儲(chǔ)的是擴(kuò)展標(biāo)志 IDE 位,當(dāng)它的值為宏 CAN_ID_STD 時(shí)表示本報(bào)文是標(biāo)準(zhǔn)幀,使用 StdId 成員存儲(chǔ)報(bào)文 ID;當(dāng)它的值為宏 CAN_ID_EXT 時(shí)表示本報(bào)文是擴(kuò)展幀,使用 ExtId 成員存儲(chǔ)報(bào)文 ID。
(4) RTR
本成員存儲(chǔ)的是報(bào)文類型標(biāo)志 RTR 位,當(dāng)它的值為宏 CAN_RTR_Data 時(shí)表示本報(bào)文是數(shù)據(jù)幀;當(dāng)它的值為宏 CAN_RTR_Remote 時(shí)表示本報(bào)文是遙控幀,由于遙控幀沒(méi)有數(shù)據(jù)段,所以當(dāng)報(bào)文是遙控幀時(shí),數(shù)據(jù)是無(wú)效的
(5) DLC
本成員存儲(chǔ)的是數(shù)據(jù)幀數(shù)據(jù)段的長(zhǎng)度,它的值的范圍是 0-8,當(dāng)報(bào)文是遙控幀時(shí) DLC值為 0。
2.6.3 CAN 篩選器結(jié)構(gòu)體
CAN 的篩選器有多種工作模式,利用篩選器結(jié)構(gòu)體可方便配置,它的定義見(jiàn)代碼清單 。代碼清單CAN 篩選器結(jié)構(gòu)體
typedefstruct
{
uint32_tFilterIdHigh;/*CAN_FxR1寄存器的高16位*/
uint32_tFilterIdLow;/*CAN_FxR1寄存器的低16位*/
uint32_tFilterMaskIdHigh;/*CAN_FxR2寄存器的高16位*/
uint32_tFilterMaskIdLow;/*CAN_FxR2寄存器的低16位*/
uint32_tFilterFIFOAssignment;/*設(shè)置經(jīng)過(guò)篩選后數(shù)據(jù)存儲(chǔ)到哪個(gè)接收FIFO*/
uint32_tFilterBank;/*篩選器編號(hào),范圍0-27,數(shù)據(jù)手冊(cè)上說(shuō)0-27是CAN1/CAN2共享,但是實(shí)測(cè)發(fā)現(xiàn)并不是這樣,CAN1是0-13,CAN2是14-27*/
uint32_tFilterMode;/*篩選器模式*/
uint32_tFilterScale;/*設(shè)置篩選器的尺度*/
uint32_tFilterActivation;/*是否使能本篩選器*/
uint32_tSlaveStartFilterBank;
}CAN_FilterTypeDef;
這些結(jié)構(gòu)體成員都是“41.2.14 驗(yàn)收篩選器”小節(jié)介紹的內(nèi)容,可對(duì)比閱讀,各個(gè)結(jié)構(gòu)體成員的介紹如下:
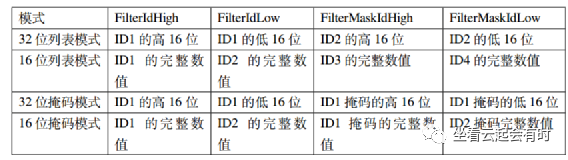
(1) FilterIdHigh
FilterIdHigh 成員用于存儲(chǔ)要篩選的 ID,若篩選器工作在 32 位模式,它存儲(chǔ)的是所篩選 ID 的高 16 位;若篩選器工作在 16 位模式,它存儲(chǔ)的就是一個(gè)完整的要篩選的 ID。
(2) FilterIdLow
類似地,F(xiàn)ilterIdLow 成員也是用于存儲(chǔ)要篩選的 ID,若篩選器工作在 32 位模式,它存儲(chǔ)的是所篩選 ID 的低 16 位;若篩選器工作在 16 位模式,它存儲(chǔ)的就是一個(gè)完整的要篩選的 ID。
(3) FilterMaskIdHigh
FilterMaskIdHigh 存儲(chǔ)的內(nèi)容分兩種情況,當(dāng)篩選器工作在標(biāo)識(shí)符列表模式時(shí),它的功能與 FilterIdHigh 相同,都是存儲(chǔ)要篩選的 ID;而當(dāng)篩選器工作在掩碼模式時(shí),它存儲(chǔ)的是 FilterIdHigh 成員對(duì)應(yīng)的掩碼,與 FilterIdLow 組成一組篩選器。
(4) FilterMaskIdLow
類似地, FilterMaskIdLow 存儲(chǔ)的內(nèi)容也分兩種情況,當(dāng)篩選器工作在標(biāo)識(shí)符列表模式時(shí),它的功能與 FilterIdLow 相同,都是存儲(chǔ)要篩選的 ID;而當(dāng)篩選器工作在掩碼模式時(shí),它存儲(chǔ)的是 FilterIdLow 成員對(duì)應(yīng)的掩碼,與 FilterIdLow 組成一組篩選器。上面四個(gè)結(jié)構(gòu)體的存儲(chǔ)的內(nèi)容很容易讓人糊涂,請(qǐng)結(jié)合前面的圖 39_0_15 和下面的表 39?7 理解,如果還搞不清楚,再結(jié)合庫(kù)函數(shù) FilterInit 的源碼來(lái)分析。
表不同模式下各結(jié)構(gòu)體成員的內(nèi)容
對(duì)這些結(jié)構(gòu)體成員賦值的時(shí)候,還要注意寄存器位的映射,即注意哪部分代表 STID,哪部分代表 EXID 以及 IDE、RTR 位。
(5) FilterFIFOAssignment
本成員用于設(shè)置當(dāng)報(bào)文通過(guò)篩選器的匹配后,該報(bào)文會(huì)被存儲(chǔ)到哪一個(gè)接收 FIFO,它的可選值為 FIFO0 或 FIFO1(宏 CAN_FILTER_FIFO0/1)。
(6) FilterBank
本成員用于設(shè)置篩選器的編號(hào),即本過(guò)濾器結(jié)構(gòu)體配置的是哪一組篩選器,CAN 一共有 28 個(gè)篩選器,所以它的可輸入?yún)?shù)范圍為 0-27。
(7) FilterMode
本 成 員 用 于 設(shè) 置 篩 選 器 的 工 作 模 式, 可 以 設(shè) 置 為 列 表 模 式 (宏CAN_FILTERMODE_IDLIST) 及掩碼模式 (宏 CAN_FILTERMODE_IDMASK)。
(8) FilterScale
本成員用于設(shè)置篩選器的尺度,可以設(shè)置為 32 位長(zhǎng) (宏 CAN_FILTERSCALE_32BIT)及 16 位長(zhǎng) (宏 CAN_FILTERSCALE_16BIT)。
(9) FilterActivation
本成員用于設(shè)置是否激活這個(gè)篩選器 (宏 ENABLE/DISABLE)。
三、CAN Cubemx配置
我們通過(guò)問(wèn)題來(lái)熟悉下cubemx配置,你熟悉了這些問(wèn)題基本就知道怎么配置了!
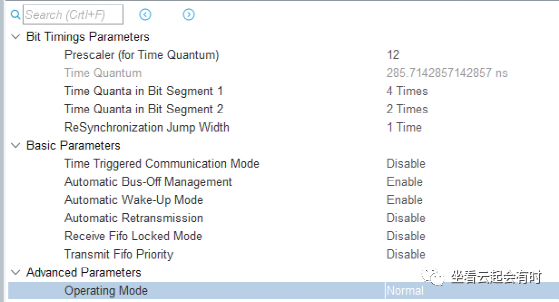
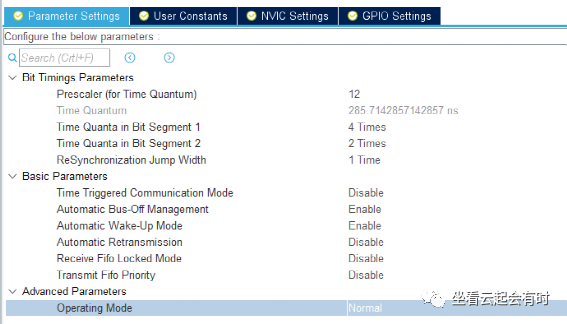
問(wèn)題:Parameter Settings分別都是設(shè)置什么的?答案:如圖
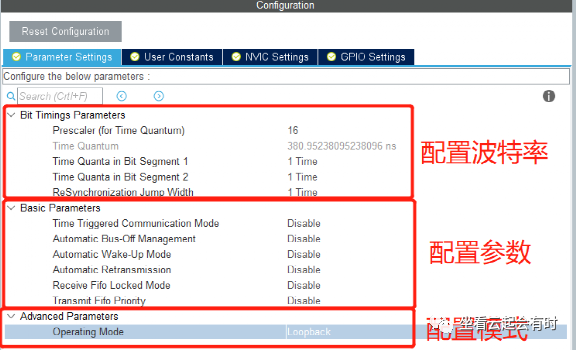
問(wèn)題:怎么配置波特率呢?
答案:用我上面貼的工具(CAN波特率計(jì)算 f103AHP1_36M f407AHP1_42M 采樣點(diǎn)軟件有說(shuō)明.rar)直接配置,舉兩個(gè)個(gè)例子
例子1:我們要配置成500KHz,那么我們這樣配置
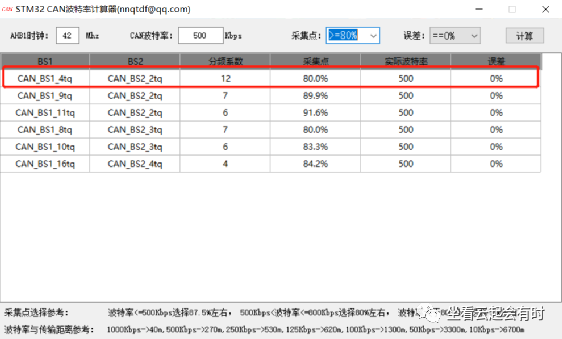
我們用采集點(diǎn)為80%,所以BS1為4tq,BS2為2tq,分頻系數(shù)為12,代進(jìn)公式Fpclk1/((CAN_BS1+CAN_BS2+1)*CAN_Prescaler)=42M/(4+2+1)/12=500kHz
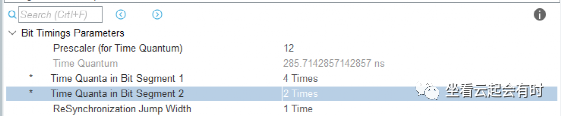
例子2:我們要配置成1M Hz,那么我們這樣配置

我們用采集點(diǎn)為75%,所以BS1為3tq,BS2為2tq,分頻系數(shù)為7,代進(jìn)公式Fpclk1/((CAN_BS1+CAN_BS2+1)*CAN_Prescaler)=42M/(3+2+1)/7=1MHz

問(wèn)題:Basic Parameter分別是啥意思呢?
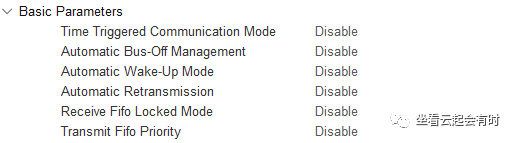
Timer Triggered Communication Mode:否使用時(shí)間觸發(fā)功能 (ENABLE/DISABLE),時(shí)間觸發(fā)功能在某些CAN 標(biāo)準(zhǔn)中會(huì)使用到。
Automatic Bus-Off Management:用于設(shè)置是否使用自動(dòng)離線管理功能 (ENABLE/DISABLE),使用自動(dòng)離線管理可以在出錯(cuò)時(shí)離線后適時(shí)自動(dòng)恢復(fù),不需要軟件干預(yù)。
Automatic Wake-Up Mode:用于設(shè)置是否使用自動(dòng)喚醒功能 (ENABLE/DISABLE),使能自動(dòng)喚醒功能后它會(huì)在監(jiān)測(cè)到總線活動(dòng)后自動(dòng)喚醒。
Automatic Retransmission:用于設(shè)置是否使用自動(dòng)重傳功能 (ENABLE/DISABLE),使用自動(dòng)重傳功能時(shí),會(huì)一直發(fā)送報(bào)文直到成功為止。
Receive Fifo Locked Mode:用于設(shè)置是否使用鎖定接收 FIFO(ENABLE/DISABLE),鎖定接收 FIFO 后,若FIFO 溢出時(shí)會(huì)丟棄新數(shù)據(jù),否則在 FIFO 溢出時(shí)以新數(shù)據(jù)覆蓋舊數(shù)據(jù)。
Transmit Fifo Priority:用于設(shè)置發(fā)送報(bào)文的優(yōu)先級(jí)判定方法 (ENABLE/DISABLE),使能時(shí),以報(bào)文存入發(fā)送郵箱的先后順序來(lái)發(fā)送,否則按照?qǐng)?bào)文 ID 的優(yōu)先級(jí)來(lái)發(fā)送。配置完這些結(jié)構(gòu)體成員后,我們調(diào)用庫(kù)函數(shù) HAL_CAN_Init 即可把這些參數(shù)寫(xiě)入到 CAN 控制寄存器中,實(shí)現(xiàn) CAN 的初始化
問(wèn)題:為啥CAN分為RX0,RX1中斷呢?

答案:STM32有2個(gè)3級(jí)深度的接收緩沖區(qū):FIFO0和FIFO1,每個(gè)FIFO都可以存放3個(gè)完整的報(bào)文,它們完全由硬件來(lái)管理。如果是來(lái)自FIFO0的接收中斷,則用CAN1_RX0_IRQn中斷來(lái)處理。如果是來(lái)自FIFO1的接收中斷,則用CAN1_RX1_IRQn中斷來(lái)處理,如圖:

問(wèn)題:CAN SCE中斷時(shí)什么?

答案:status chanege error,錯(cuò)誤和狀態(tài)變化中斷!
四、CAN分析工具的使用
下面我們會(huì)用到CAN分析工具,還是比較好用的,此部分使用作為自己使用
https://www.zhcxgd.com/h-col-112.html
五、實(shí)驗(yàn)
1.Normal模式測(cè)試500K 波特率(定時(shí)發(fā)送,輪詢接收)
1.1 CubeMx配置

1.2 設(shè)置Filter過(guò)濾,我們只使能FIFO0,并且不過(guò)濾任何消息
uint8_tbsp_can1_filter_config(void)
{
CAN_FilterTypeDeffilter={0};
filter.FilterActivation=ENABLE;
filter.FilterMode=CAN_FILTERMODE_IDMASK;
filter.FilterScale=CAN_FILTERSCALE_32BIT;
filter.FilterBank=0;
filter.FilterFIFOAssignment=CAN_FILTER_FIFO0;
filter.FilterIdLow=0;
filter.FilterIdHigh=0;
filter.FilterMaskIdLow=0;
filter.FilterMaskIdHigh=0;
HAL_CAN_ConfigFilter(&hcan1,&filter);
returnBSP_CAN_OK;
}
1.3 開(kāi)啟CAN(注意,默認(rèn)Cubemx生成的代碼并沒(méi)有can start)
HAL_CAN_Start(&hcan1);
1.4 編寫(xiě)發(fā)送函數(shù)
我們開(kāi)出了幾個(gè)參數(shù),id_type是擴(kuò)展幀還是標(biāo)準(zhǔn)幀,basic_id標(biāo)準(zhǔn)幀ID(在標(biāo)準(zhǔn)幀中有效),ex_id擴(kuò)展幀ID(在擴(kuò)展幀中有效),data要發(fā)送的數(shù)據(jù),data_len要發(fā)送的數(shù)據(jù)長(zhǎng)度
uint8_tbsp_can1_send_msg(uint32_tid_type,uint32_tbasic_id,uint32_tex_id,uint8_t*data,uint32_tdata_len)
{
uint8_tindex=0;
uint32_t*msg_box;
uint8_tsend_buf[8]={0};
CAN_TxHeaderTypeDefsend_msg_hdr;
send_msg_hdr.StdId=basic_id;
send_msg_hdr.ExtId=ex_id;
send_msg_hdr.IDE=id_type;
send_msg_hdr.RTR=CAN_RTR_DATA;
send_msg_hdr.DLC=data_len;
send_msg_hdr.TransmitGlobalTime=DISABLE;
for(index=0;index
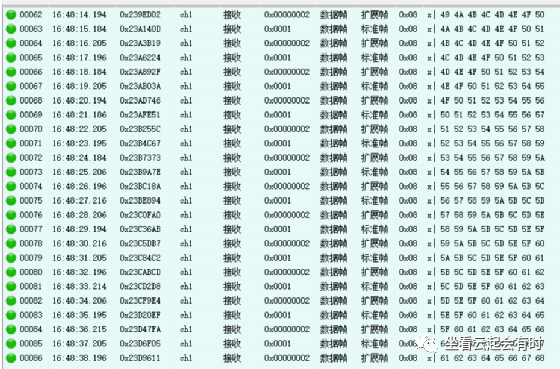
我們?cè)趍ain函數(shù)中1s發(fā)送一幀,標(biāo)準(zhǔn)幀跟擴(kuò)展幀交叉調(diào)用,代碼如下:
send_data[0]++;
send_data[1]++;
send_data[2]++;
send_data[3]++;
send_data[4]++;
send_data[5]++;
send_data[6]++;
send_data[7]++;
if(id_type_std==1)
{
bsp_can1_send_msg(CAN_ID_STD,1,2,send_data,8);
id_type_std=0;
}
else
{
bsp_can1_send_msg(CAN_ID_EXT,1,2,send_data,8);
id_type_std=1;
}
HAL_Delay(1000);
我們通過(guò)CAN協(xié)議分析儀來(lái)抓下結(jié)果
1.5 編寫(xiě)輪詢接收函數(shù)
uint8_tbsp_can1_polling_recv_msg(uint32_t*basic_id,uint32_t*ex_id,uint8_t*data,uint32_t*data_len)
{
uint8_tindex=0;
uint8_trecv_data[8];
CAN_RxHeaderTypeDefheader;
while(HAL_CAN_GetRxFifoFillLevel(&hcan1,CAN_RX_FIFO0)!=0)
{
if(__HAL_CAN_GET_FLAG(&hcan1,CAN_FLAG_FOV0)!=RESET)
printf("[CAN]FIFO0overrun!
");
HAL_CAN_GetRxMessage(&hcan1,CAN_RX_FIFO0,&header,recv_data);
if(header.IDE==CAN_ID_STD)
{
printf("StdIdID:%d
",header.StdId);
}
else
{
printf("ExtIdID:%d
",header.ExtId);
}
printf("CANIDE:0x%x
",header.IDE);
printf("CANRTR:0x%x
",header.RTR);
printf("CANDLC:0x%x
",header.DLC);
printf("RECVDATA:");
for(index=0;index
實(shí)驗(yàn)一總結(jié):
1.沒(méi)用調(diào)用HAL_CAN_Start(&hcan1);使能CAN
2.沒(méi)有編寫(xiě)Filter函數(shù),我開(kāi)始自認(rèn)為不設(shè)置就默認(rèn)不過(guò)濾,現(xiàn)在看來(lái)是我想多了,其實(shí)想想也合理,你如果不過(guò)濾分配FIFO,STM32怎么決定把收到的放到哪個(gè)FIFO中
待提升:
1.目前只用到FIFO0,待把FIFO1使用起來(lái)2.Normal模式測(cè)試500K 波特率(定時(shí)發(fā)送,中斷接收)
2.1 CubeMx配置

步驟2,3,4跟polling完全一致,我們來(lái)直接說(shuō)下中斷怎么用(主要是使能notifity就行了)
staticvoidMX_CAN1_Init(void)
{
/*USERCODEBEGINCAN1_Init0*/
/*USERCODEENDCAN1_Init0*/
/*USERCODEBEGINCAN1_Init1*/
/*USERCODEENDCAN1_Init1*/
hcan1.Instance=CAN1;
hcan1.Init.Prescaler=12;
hcan1.Init.Mode=CAN_MODE_NORMAL;
hcan1.Init.SyncJumpWidth=CAN_SJW_1TQ;
hcan1.Init.TimeSeg1=CAN_BS1_4TQ;
hcan1.Init.TimeSeg2=CAN_BS2_2TQ;
hcan1.Init.TimeTriggeredMode=DISABLE;
hcan1.Init.AutoBusOff=ENABLE;
hcan1.Init.AutoWakeUp=ENABLE;
hcan1.Init.AutoRetransmission=DISABLE;
hcan1.Init.ReceiveFifoLocked=DISABLE;
hcan1.Init.TransmitFifoPriority=DISABLE;
if(HAL_CAN_Init(&hcan1)!=HAL_OK)
{
Error_Handler();
}
/*USERCODEBEGINCAN1_Init2*/
bsp_can1_filter_config();
HAL_CAN_Start(&hcan1);
HAL_CAN_ActivateNotification(&hcan1,CAN_IT_RX_FIFO0_MSG_PENDING);
/*USERCODEENDCAN1_Init2*/
}
下面我們來(lái)編寫(xiě)下中斷函數(shù)
voidHAL_CAN_RxFifo0MsgPendingCallback(CAN_HandleTypeDef*hcan)
{
uint8_tindex=0;
uint8_trecv_data[8];
CAN_RxHeaderTypeDefheader;
HAL_CAN_GetRxMessage(&hcan1,CAN_RX_FIFO0,&header,recv_data);
if(header.IDE==CAN_ID_STD)
{
printf("StdIdID:%d ",header.StdId);
}
else
{
printf("ExtIdID:%d ",header.ExtId);
}
printf("CANIDE:0x%x ",header.IDE);
printf("CANRTR:0x%x ",header.RTR);
printf("CANDLC:0x%x ",header.DLC);
printf("RECVDATA:");
for(index=0;index
{
printf("0x%x",recv_data[index]);
}
printf(" ");
來(lái)源:坐看云起會(huì)有時(shí)
審核編輯:湯梓紅
-
通信協(xié)議
+關(guān)注
關(guān)注
28文章
996瀏覽量
40943 -
CAN
+關(guān)注
關(guān)注
57文章
2884瀏覽量
466710 -
I2C
+關(guān)注
關(guān)注
28文章
1533瀏覽量
126986 -
ecu
+關(guān)注
關(guān)注
14文章
914瀏覽量
55436 -
串行通信
+關(guān)注
關(guān)注
4文章
586瀏覽量
36014
原文標(biāo)題:
文章出處:【微信號(hào):談思實(shí)驗(yàn)室,微信公眾號(hào):談思實(shí)驗(yàn)室】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
CAN總線協(xié)議知識(shí)科普
CAN總線通信協(xié)議的基礎(chǔ)知識(shí)

【CAN總線知識(shí)】全面了解CAN總線協(xié)議

CAN/CAN FD/CAN XL三大總線協(xié)議解讀,是逐步替代關(guān)系嗎?
CAN協(xié)議基礎(chǔ)知識(shí)
介紹CAN總線的相關(guān)概念
簡(jiǎn)單介紹CAN總線的相關(guān)概念
CAN總線協(xié)議是什么?CAN總線協(xié)議有哪些?CAN總線協(xié)議知識(shí)分析

關(guān)于CAN總線錯(cuò)誤的相關(guān)知識(shí)
關(guān)于CAN總線協(xié)議的相關(guān)知識(shí)介紹
CAN總線基礎(chǔ)知識(shí)
全面解讀CAN 總線協(xié)議的相關(guān)知識(shí)
虹科干貨 | 帶你全面認(rèn)識(shí)“CAN總線錯(cuò)誤”(二)——CAN錯(cuò)誤類型

【技術(shù)分享】CAN總線相關(guān)知識(shí)探討以及Model3C兩路CAN的應(yīng)用





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論