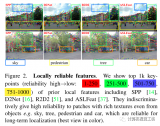
? 介紹 以往的特征檢測和匹配算法側重于提取大量冗余的局部可靠特征,這樣會導致效率和準確性有限,特別....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 06-30 10:49
?1003次閱讀
激光SLAM很多人都覺得很難,對于初學者更是不知道從哪里開始學起,怎樣才能更高效的學習,進入相關企業....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 06-29 15:28
?896次閱讀
0摘要 相位測量偏轉法(PMD)具有動態范圍大、非接觸式操作、全場測量、采集速度快、精度高、自動數據....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 06-29 10:01
?2640次閱讀

自動駕駛傳感器配置需求隨著汽車智能化和電動化的快速發展不斷增加。當前的傳感器趨向于從探測范圍、探測精....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 06-29 10:00
?727次閱讀
SAM被認為是里程碑式的視覺基礎模型,它可以通過各種用戶交互提示來引導圖像中的任何對象的分割。SAM....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 06-28 15:08
?5700次閱讀

SGBM(Semi-Global Block Matching)是一種用于計算雙目視覺中視差(dis....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 06-28 09:29
?2717次閱讀
激光slam中,LOAM(Lidar Odometry and Mapping in Real-ti....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 06-28 09:25
?941次閱讀

多階段策略在圖像修復任務中被廣泛應用,雖然基于Transformer的方法在單圖像超分辨率任務中表現....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 06-27 11:07
?1365次閱讀

?導讀 ? 本文是VCC馬雪奇同學對論文 SHINE-Mapping: Large-Scale 3D....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 06-27 11:01
?1228次閱讀

VCPKG是微軟C++ 團隊開發的適用于C 和C++ 庫的跨平臺開源軟件包管理器,它大大簡化了Win....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 06-27 09:14
?4383次閱讀

MVTec MERLIC & HALCON – Mvtec公司宣布了一個基于Halcon庫的新的視覺....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 06-26 11:40
?3820次閱讀
? 摘要 準確地感知物體實例并預測它們未來的運動是自動駕駛車輛的關鍵任務,使它們能夠在復雜的城市交通....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 06-25 16:06
?831次閱讀

Neural Radiance Fields (NeRF) 通過合成 3D 場景新視角圖像展現出驚人....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 06-25 11:11
?609次閱讀

視覺感知算法的核心在于精準實時地感知周圍環境,以便下游更好地進行決策規劃,而 目標檢測任務 就是視覺....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 06-25 10:37
?867次閱讀

SLAM(The Simultaneous Localisation and Mapping)中文的....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 06-25 10:35
?947次閱讀

00 Eigen簡介 Eigen:基于線性代數的C ++模板庫,主要用于矩陣,向量,數值求解器和相關....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 06-25 10:28
?1042次閱讀
對于一個m線的激光雷達,在掃描的某一時刻會得到m個點,如果旋轉一周掃描了n次,那么得到的點云就可以用....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 06-21 10:30
?2415次閱讀

視覺慣性融合技術應用于機器人和自動駕駛方面。單目相機和低成本IMU成為最佳選擇。因為VIO系統的高度....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 06-21 09:22
?1389次閱讀

所有這些部分都是密切相關的。車輛和道路實體的位置信息可以通過結合位置、感知和地圖信息來獲得。相比之下....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 06-20 10:04
?2167次閱讀

機器人對未知環境的自主探索是機器人智能化的關鍵技術。為了提高搜索效率,作者提出了一種基于邊界點優化和....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 06-19 10:19
?1848次閱讀
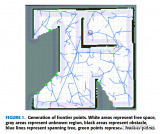
目標邊界點的選擇是有效探索的關鍵。以邊界為基礎的戰略是由Yamauchi首先提出的。所使用的探索策略....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 06-19 10:15
?671次閱讀
一、摘要 本文介紹了一種基于深度學習的三維點云配準新方法。該架構由三個部分組成: (1)編碼器由基于....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 06-17 09:54
?1725次閱讀

? 我們都知道特征檢測和匹配是計算機視覺領域中的重要任務,它們在許多應用中發揮著關鍵作用,比如SLA....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 06-16 16:48
?3321次閱讀
vMAP 是一種基于神經場的對象級密集 SLAM 系統,可根據 RGB-D 輸入流實時自動構建對象級....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 06-15 09:29
?1059次閱讀

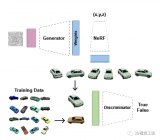
? 3D對象的生成模型在VR和增強現實應用中越來越受歡迎。但使用標準的3D表示(如體素或點云)來訓練....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 06-14 10:16
?1470次閱讀
作者引入了一種方法,可以僅使用單個寬基線立體圖像對生成新視角。在這種具有挑戰性的情況下,3D場景點只....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 06-13 09:29
?933次閱讀

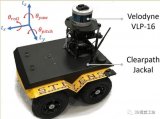
本文旨在介紹使用OptiTrack光學跟蹤系統和Turtlebot機器人進行視覺SLAM定位實驗的詳....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 06-13 09:24
?2187次閱讀

近日,Snap 研究院推出最新高性能 Stable Diffusion 模型,通過對網絡結構、訓練流....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 06-12 15:25
?1068次閱讀

介紹 NeRF( Neural Radiance Fields )是一種先進的計算機圖形學技術,能夠....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 06-12 09:52
?7018次閱讀

LeGO-LOAM全稱為:Lightweight and Groud-Optimized Lidar....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 06-11 15:02
?1931次閱讀





 工商網監
工商網監