介紹 一般意義上,相機姿態估計通常依賴于如手工的特征檢測匹配、RANSAC和束調整(BA)。在本文中....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 07-23 15:22
?1737次閱讀

近日,梅卡曼德對AI視覺軟件Mech-DLK進行了重磅升級。全新升級的Mech-DLK內置快速定位、....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 07-23 15:19
?1238次閱讀
論文在III-B部分描述了論文方法背后的SLAM管道。論文的2D潛在先驗網絡(LPN)在III-C中....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 07-19 15:55
?787次閱讀

導讀 繼卷積神經網絡之后,Transformer又推進了圖像識別的發展,成為視覺領域的又一主導。最近....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 07-17 14:35
?655次閱讀
6自由度視覺定位是在給定先驗三維地圖和查詢圖像的情況下估計相機絕對姿態的任務。這是一個具有挑戰性的研....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 07-17 14:30
?664次閱讀
C++一直都被稱作是最難學的計算機語言,筆者從業多年,也認為確實如此。相比于其他幾種語言,單純從語法....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 07-17 14:27
?653次閱讀
深度學習在計算機視覺中的成功很大程度上是由卷積神經網絡(CNNs)推動的。從AlexNet這一里程碑....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 07-17 14:25
?1281次閱讀

本文建立了一個用于無人機距離估計的UAVDE數據集,通過UWB傳感器獲取兩個無人機之間的距離。實驗發....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 07-17 11:27
?1843次閱讀
總的來說,框架實現穩健的數據關聯、精確的物體參數化以及基于語義對象地圖的高層應用,解決了對象SLAM....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 07-14 16:49
?940次閱讀

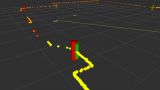
VEnus算法對于反光柱導航的基本思路,其主要分為了高反點提取、高反點聚類查找中心、高反點與已知反光....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 07-14 15:37
?927次閱讀
作者使用一個多頭神經網絡來參數化預測的占位概率和流向量。該網絡以體素化的LiDAR數據、光柵地圖和一....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 07-12 10:35
?626次閱讀

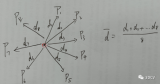
主要利用點云數據的主軸方向進行配準。首先計算兩組點云的協方差矩陣,根據協方差矩陣計算主要的特征分量,....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 07-10 15:16
?6160次閱讀
雷達以用于高級駕駛輔助系統(ADAS)多年。然而,盡管雷達在汽車行業中很流行,考慮到3D目標檢測時,....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 07-10 14:55
?3110次閱讀

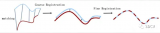
文章采用了統一的B樣條(Uniform B-Splines)來建模地面表面,這種方法對于不同的測量密....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 07-09 15:52
?840次閱讀
根據點云數據的某些屬性或特征進行篩選,可以一次刪除滿足對輸入的點云設定的一個或多個條件指標的所有的數....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 07-09 15:18
?4542次閱讀
理解Transformer背后的理論基礎,比如自注意力機制(self-attention), 位置編....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 07-09 14:35
?702次閱讀

越來越多的機器人系統配備了多個慣性測量單元(IMU)。由于競爭性目標,當用于控制時期望靠近重心,或者....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 07-08 09:41
?2995次閱讀

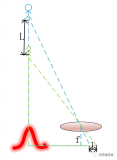
激光雷達根據原理可以分為TOF(飛行時間),三角法測距和相位測距三種方式。 三角法測距為 三角測距法....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 07-08 09:40
?7496次閱讀
在自動駕駛系統中,傳感器是系統能感知周圍環境的決定性因素。在傳感器裝車后,需要通過傳感器標定消除安裝....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 07-08 09:35
?1000次閱讀
在本文中,我們將主要介紹Dijkstra算法和A*算法,從成本計算的角度出發,并逐步展開討論。 我們....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 07-07 10:56
?2216次閱讀

作者:K.Fire | 來源:3D視覺工坊 在公眾號 「3D視覺工坊」 后臺,回復「 原論 文 」即....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 07-07 10:54
?819次閱讀

2019年遷移科技進行天使輪融資時,很多投資人都在問樊鈺相同的問題:3D視覺到底是不是偽需求?所謂的....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 07-06 10:27
?2008次閱讀
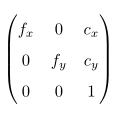
傳統的RGB彩色普通相機稱為2D相機,只能拍攝相機視角內的物體,沒有物體到相機的距離信息,只能憑感覺....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 07-06 10:22
?1418次閱讀

本篇文章為大家介紹RSPrompter: Learning to Prompt for Remote....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 07-06 09:08
?2313次閱讀

本文介紹了SONICVERSE,這是一個多感官模擬平臺,用于訓練既能看又能聽的家用代理人。該平臺在實....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 07-05 10:20
?782次閱讀

來源:機器之心 SAM (Segment Anything )作為一個視覺的分割基礎模型,在短短的 ....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 07-05 10:18
?1409次閱讀

首先,課程介紹了雙目相機標定的基礎知識。我了解到雙目相機是由兩個相機組成的系統,通過同時拍攝目標物體....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 07-03 14:25
?3775次閱讀

預訓練的2D圖像或語言Transformer:作為基礎Transformer模型,具有豐富的特征表示....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 07-03 10:59
?1096次閱讀

一種用于新穎未知動態物體的因果 6 自由度姿態跟蹤和 3D 重建的新方法。該方法利用了并發跟蹤和神經....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 07-03 10:49
?694次閱讀
對于學術研究而言,LeGo-LOAM是激光SLAM的經典框架,LeGo-LOAM源碼簡潔清晰,比LO....
![的頭像]() 3D視覺工坊 發表于
3D視覺工坊 發表于 07-03 10:47
?1163次閱讀






 工商網監
工商網監