") 校準(zhǔn)多個(gè)慣性測量單元(IMU)和各個(gè)軸的外參
校準(zhǔn)多個(gè)慣性測量單元(IMU)和各個(gè)軸的外參

摘要
大家好,今天為大家?guī)淼奈恼率恰狤xtending kalibr: Calibrating the Extrinsics of Multiple IMUs and of Individual Axes 越來越多的機(jī)器人系統(tǒng)配備了多個(gè)慣性測量單元(IMU)。由于競爭性目標(biāo),當(dāng)用于控制時(shí)期望靠近重心,或者在與外部感知傳感器集成時(shí)為了獲得無阻礙的視野,單個(gè)IMU經(jīng)常被安裝在相當(dāng)遠(yuǎn)的距離上。結(jié)果是,在平臺(tái)受到旋轉(zhuǎn)運(yùn)動(dòng)時(shí),不同的IMU感受到不同的加速度。本文提出了一種方法,可以在基于開源相機(jī)/IMU標(biāo)定工具kalibr的單個(gè)估計(jì)器中對多個(gè)IMU進(jìn)行空間標(biāo)定。我們進(jìn)一步擴(kuò)展該工具以確定IMU內(nèi)在參數(shù),從而實(shí)現(xiàn)對低成本IMU的精確校準(zhǔn)。結(jié)果表明,擴(kuò)展的估計(jì)器能夠精確地確定這些內(nèi)在參數(shù),并且能夠?qū)⑸逃眉墑eIMU內(nèi)的每個(gè)加速度計(jì)軸線定位到毫米級精度。
引言
隨著慣性測量單元的成本穩(wěn)步下降和集成視覺/慣性傳感器的出現(xiàn),越來越多的機(jī)器人平臺(tái)配備了多個(gè)慣性測量單元。一個(gè)例子是裝備有戰(zhàn)術(shù)級IMU的Boston Dynamics四足平臺(tái)[1],該IMU被剛性安裝到立體相機(jī)設(shè)置中,并用于視覺/慣性測距,而導(dǎo)航級別的IMU則安裝在機(jī)器人體內(nèi)。另一個(gè)例子是Shen等人的四旋翼平臺(tái)[2],該平臺(tái)使用低成本IMU進(jìn)行自動(dòng)駕駛低層控制,以及額外的高性能IMU進(jìn)行視覺/慣性運(yùn)動(dòng)估計(jì)。這些平臺(tái)的共同之處在于它們采用主IMU,該IMU的位置和對齊方式對于運(yùn)動(dòng)(即靠近重心并與平臺(tái)的主軸對齊)具有意義,并且第二個(gè)輔助IMU安裝在某些外部感知傳感器的附近,位置上受到平臺(tái)本身的最小阻礙。對于大多數(shù)平臺(tái),這兩個(gè)位置將非常不同。為了理解來自輔助傳感器套件的自我運(yùn)動(dòng)估計(jì),以進(jìn)行控制和運(yùn)動(dòng),它們必須轉(zhuǎn)換為主IMU的坐標(biāo)系。為此,需要準(zhǔn)確估計(jì)兩個(gè)坐標(biāo)系之間的轉(zhuǎn)換。
雖然可以估計(jì)兩個(gè)IMU相對于外部感知器的轉(zhuǎn)換并隨后鏈接它們,但很少有工作涉及在單個(gè)估計(jì)器內(nèi)融合多個(gè)IMU的測量。我們認(rèn)為其中一個(gè)原因在于需要建模在加速度計(jì)輸入軸(IA)以外的任何位置感知到的加速度所需的角加速度--這通常不直接測量。雖然可以從陀螺儀感知到的角速度測量數(shù)值微分來推導(dǎo)角加速度的估計(jì)值,但我們在這里采用了不同的方法:Furgale等人提出的成批持續(xù)時(shí)間估計(jì)框架[5]擬合表示兩個(gè)坐標(biāo)系隨時(shí)間演變的樣條曲線來適應(yīng)一系列定向和角速度測量。假設(shè)角速度變化平滑,則可以直接從此方向曲線中導(dǎo)出角加速度的估計(jì)。
相同的估計(jì)器可用于進(jìn)一步的應(yīng)用:高端IMUs通常為加速度計(jì)測量每個(gè)軸使用一個(gè)集成電路(IC),而不是使用單個(gè)IC將所有軸組合在一個(gè)芯片上。各個(gè)軸可能相距數(shù)厘米,這違反了它們在一般運(yùn)動(dòng)下受相同加速度的假設(shè)。如果未加考慮,這會(huì)引入誤差,有時(shí)在導(dǎo)航文獻(xiàn)中被稱為“尺寸效應(yīng)”[6]。因此,應(yīng)考慮各個(gè)軸相對于輸入?yún)⒖驾S(IRA)原點(diǎn)的偏移量,以獲得最大的標(biāo)定性能。
本研究的貢獻(xiàn)如下: 1.我們推導(dǎo)出一個(gè)估計(jì)器,用于同時(shí)內(nèi)在和外在標(biāo)定多個(gè) IMUs與一個(gè)或多個(gè)外部感知傳感器相關(guān)聯(lián)。 2. 我們將該估計(jì)器推廣到另外確定各個(gè)加速度計(jì)軸的位置。 3. 我們提供了一項(xiàng)全面的實(shí)驗(yàn)研究,演示了精確的內(nèi)在標(biāo)定,并顯示了在商業(yè)級IMU內(nèi)定位單個(gè)加速度計(jì)軸的可能性。該方法是作為開源相機(jī)/IMU標(biāo)定工具箱kalibr2的擴(kuò)展實(shí)現(xiàn)的,并將作為其更新發(fā)布。
相關(guān)工作
本文研究標(biāo)定包含一個(gè)或多個(gè)IMU和一個(gè)或多個(gè)外部感知傳感器的傳感器組合。標(biāo)定的目標(biāo)是提高從所有可用傳感器融合測量得到的狀態(tài)估計(jì)結(jié)果。因此,估計(jì)IMU與外部感知傳感器之間的外參是該方法的重要部分。我們將限制相關(guān)工作的回顧范圍,僅關(guān)注類似的方法。
然而,已經(jīng)有大量的研究致力于解決標(biāo)定冗余IMU的問題,但不是著重于與其他傳感器進(jìn)行融合應(yīng)用。在這方面,進(jìn)一步的文獻(xiàn)綜述起點(diǎn)可能是Pittelkau等人的工作[16],Hwangbo等人的工作[17]和Nilsson等人的工作[18]。
Mirzaei等人[8]和Kelly等人[9]提出了一個(gè)基于擴(kuò)展卡爾曼濾波(EKF)的框架,通過記錄標(biāo)定序列以估計(jì)IMU和相機(jī)之間的變換關(guān)系。Fleps等人[11]使用類似的標(biāo)定程序通過批量優(yōu)化確定這些量。他們的方法估計(jì)了一個(gè)作為樣條編碼的連續(xù)軌跡,而不是將運(yùn)動(dòng)表示為離散狀態(tài)的序列。Furgale等人[7]采用了類似的連續(xù)時(shí)間方法,但還將相機(jī)和IMU之間的時(shí)間偏移估計(jì)折疊到估計(jì)器中,該參數(shù)先前曾在單獨(dú)的過程中估計(jì)過([10],[12])。
Krebs通過IMU內(nèi)參擴(kuò)展了該方法[15]。同樣,Zachariah等人[13]將內(nèi)參數(shù)納入離散時(shí)間σ點(diǎn)卡爾曼濾波器(SPKF)估計(jì)框架中。最近,Li等人[14]展示了作為在線狀態(tài)估計(jì)框架的一個(gè)完整部分,估計(jì)相機(jī)/IMU外參、時(shí)間延遲和IMU內(nèi)參,使用多狀態(tài)約束卡爾曼濾波器(MSCKF)。與這里回顧的其他方法不同,他們的方法使用自然視覺地標(biāo)而不是專用的標(biāo)定圖案,并額外估計(jì)相機(jī)內(nèi)部參數(shù)焦距fc、主點(diǎn)cc和畸變參數(shù)kc。
我們的方法基于[7],將該方法擴(kuò)展為將多個(gè)IMUs合并到單個(gè)估計(jì)器中。可以使用同樣的公式確定各個(gè)加速度計(jì)軸的位移,即使只包含一個(gè)IMU的傳感器組合也能得到更完整的模型。從[15]借鑒,將IMU內(nèi)參添加到標(biāo)定參數(shù)中以改善結(jié)果。
表I總結(jié)了這些方法,使用將在第III-D節(jié)中介紹的符號。星號標(biāo)記在單獨(dú)的前置步驟中進(jìn)行時(shí)間校準(zhǔn)的方法。
表1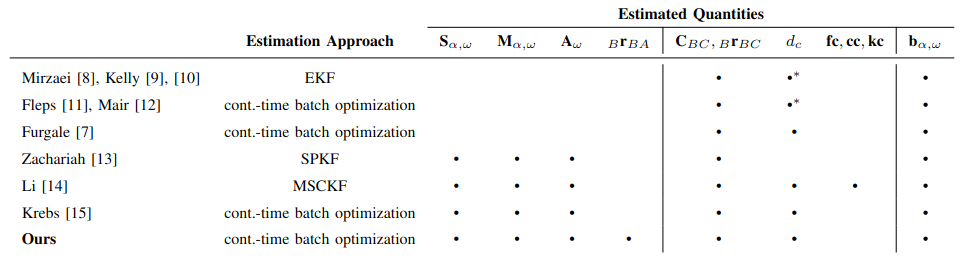
方法
A. 坐標(biāo)系約定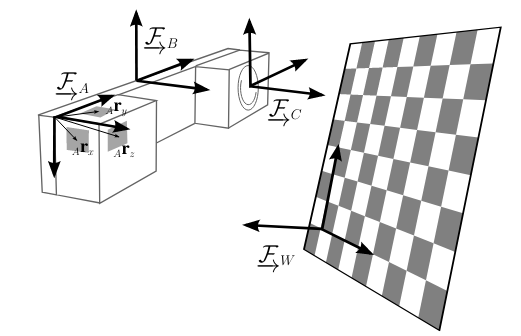


B.加速度模型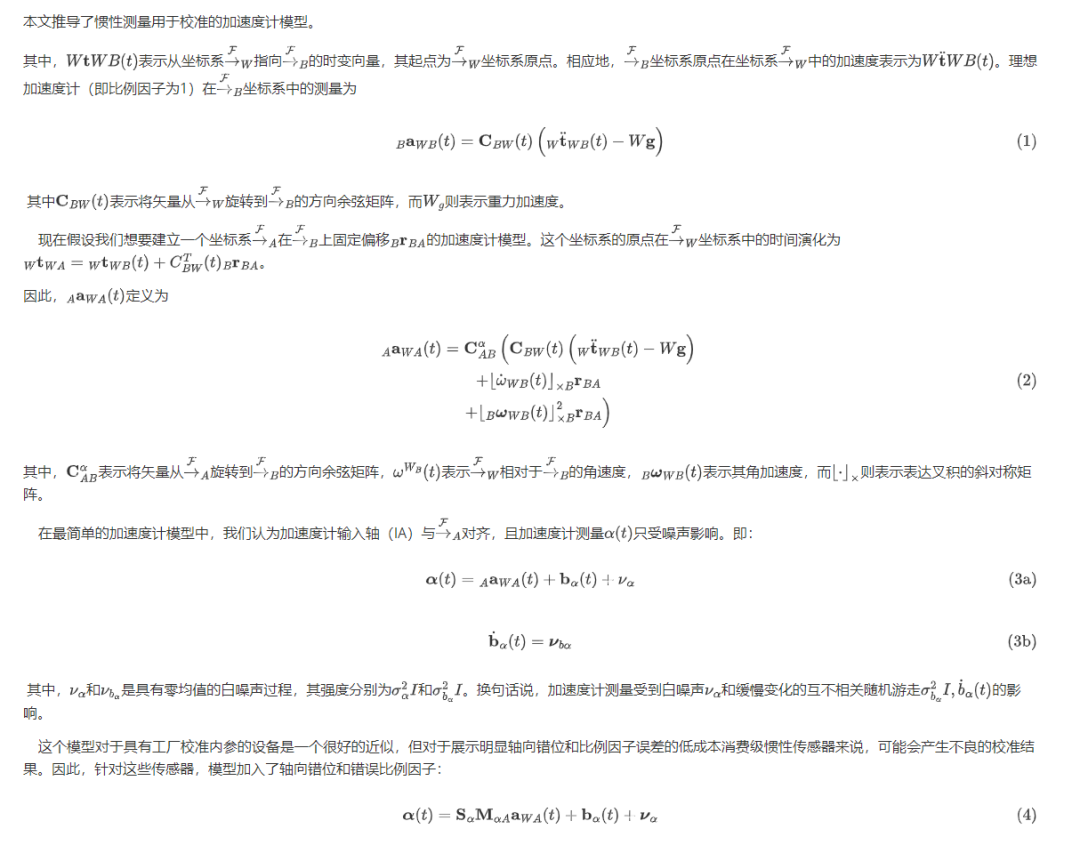
1. 模型
1)我們用9個(gè)控制點(diǎn)參數(shù)化每個(gè)對象的3D模型。9個(gè)點(diǎn)分別是3D模型標(biāo)定框的8個(gè)角點(diǎn)和對象3D模型的中心點(diǎn)。
2)模型的輸入是RGB圖像,然后用全卷積架構(gòu)對圖像進(jìn)行處理,如1(a)所示,圖像被劃分為S*S個(gè)單元,如1(c)所示,每個(gè)單元會(huì)輸出9個(gè)控制點(diǎn)的2D圖像坐標(biāo),對象的類別概率3和一個(gè)整體的置信度值。網(wǎng)絡(luò)的輸出存儲(chǔ)在一個(gè)S*S*D的3D張量中,如1(e)所示。
我們通過一個(gè)置信度函數(shù)計(jì)算: 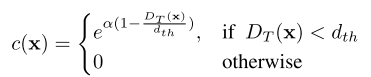 ????????
????????
計(jì)算的主要依據(jù)為預(yù)測的點(diǎn)到目標(biāo)點(diǎn)的距離。
3)整個(gè)網(wǎng)絡(luò)在YOLO v2架構(gòu)上進(jìn)行擴(kuò)展。
2. 損失函數(shù)
整個(gè)網(wǎng)絡(luò)的損失函數(shù)如下所示:
3. 位姿預(yù)測
對于單個(gè)對象占據(jù)多個(gè)單元格的情況,我們在單元格3*3的鄰居范圍內(nèi)尋找擁有最大置信度值的單元格,預(yù)測值則通過加權(quán)計(jì)算各個(gè)單元格的檢測結(jié)果獲得。
最終,我們根據(jù)網(wǎng)絡(luò)輸出的9個(gè)控制點(diǎn)結(jié)合PnP算法計(jì)算對象的6D位姿。
主要結(jié)果
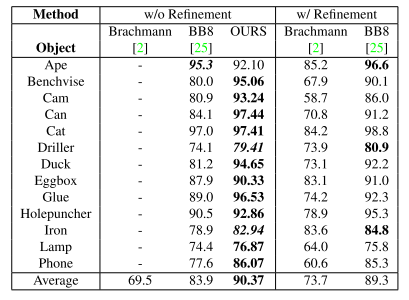
表1. 在LINEMOD數(shù)據(jù)集下和其它方法對比的結(jié)果,度量標(biāo)準(zhǔn)為2D重投影誤差。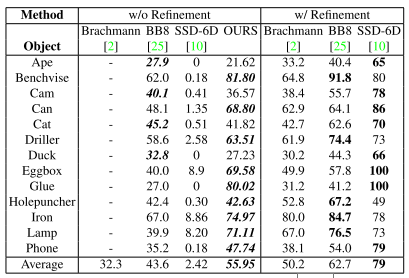
表2. 在LINEMOD數(shù)據(jù)集下和其它方法對比的結(jié)果,度量標(biāo)準(zhǔn)為ADD。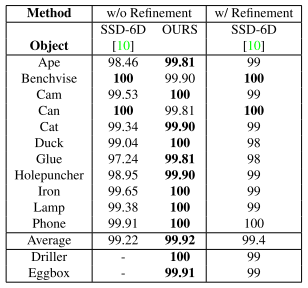
表3. 在LINEMOD數(shù)據(jù)集下和其它方法對比的結(jié)果,度量標(biāo)準(zhǔn)為IoU。
作者:泡泡機(jī)器人 | 來源:泡泡機(jī)器人SLAM
標(biāo)題:Extending kalibr: Calibrating the Extrinsics of Multiple IMUs and of Individual Axes
作者:Joern Rehder, Janosch Nikolic, Thomas Schneider, Timo Hinzmann and Roland Siegwart
來源:ICRA
編譯:吳家盛
審核:劉國慶
審核編輯:劉清
-
傳感器
+關(guān)注
關(guān)注
2565文章
52903瀏覽量
766583 -
機(jī)器人
+關(guān)注
關(guān)注
213文章
29691瀏覽量
212586 -
陀螺儀
+關(guān)注
關(guān)注
44文章
845瀏覽量
99923 -
IMU
+關(guān)注
關(guān)注
6文章
356瀏覽量
46680 -
卡爾曼濾波器
+關(guān)注
關(guān)注
0文章
54瀏覽量
12379
原文標(biāo)題:擴(kuò)展kalibr:校準(zhǔn)多個(gè)慣性測量單元(IMU)和各個(gè)軸的外參
文章出處:【微信號:3D視覺工坊,微信公眾號:3D視覺工坊】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
ADI推出ADIS16407 iSensor IMU(慣性測量單元)
基于MEMS技術(shù)的IMU慣性測量單元的工作原理解析
關(guān)于IMU慣性測量單元的詳細(xì)簡析
詳細(xì)解說IMU慣性測量單元的定義以及原理
IMU慣性測量單元是什么?
InvenSense慣性測量單元IMU_MPU6050中文數(shù)據(jù)手
使用arduino/genuino 101的板載慣性測量單元(IMU)教程







 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論