貿(mào)澤電子即日起備貨Bosch的BMI270 智能慣性測量單元 (IMU)。此款超低功耗IMU采用Bosch 的MEMS工藝技術(shù),大大減小了加速度計(jì)的偏移并提高了靈敏度。
2019-10-07 10:14:00 10089
10089 貿(mào)澤電子 即日起備貨Bosch的BMI270 智能慣性測量單元 (IMU)。
2019-08-28 15:36:561691 廣。 ? MEMS 重要類別——IMU ? 慣性測量單元一直是MEMS市場里重要的產(chǎn)品類型,主要包括加速度計(jì)、陀螺儀和磁力計(jì)。如今,由分立的慣性測量單元組合成的三軸、六軸、九軸IMU,將加速度傳感器、陀螺儀、磁傳感器等MEMS器件集成在一起,以滿足生產(chǎn)
2023-08-01 00:08:001007 3DM-GX5-15 慣性測試單元IMU3DM-GX5-15 慣性測試單元IMU 3DM-GX5-15 慣性測試單元IMU 詳詢請致電:***工作q:11398788543DM-GX5-15】IMU
2020-12-07 09:05:45
輔助慣導(dǎo)、AHRS航姿參考、垂直陀螺和IMU慣性測量單元。LORD MicroStrain sensing system的產(chǎn)品具有重量輕(最小僅8g),體積小,功耗低的特點(diǎn)。目前被廣泛應(yīng)用于航天航空
2020-12-16 14:18:35
IMU的工作原理是什么?IMU、AHRS、VRU和INS的區(qū)別在哪?怎樣去搭建一種IMU誤差模型?慣性傳感器分為哪幾種?怎樣去選擇?
2021-07-13 06:16:20
簡介對于在反饋環(huán)路中采用MEMS慣性測量單元(IMU) 的高性能運(yùn)動(dòng)控制系統(tǒng),傳感器對準(zhǔn)誤差常常是其關(guān)鍵考慮之一。對于IMU中的陀螺儀,傳感器對準(zhǔn)誤差描述各陀螺儀的旋轉(zhuǎn)軸與系統(tǒng)定義的"
2018-10-17 10:39:42
簡介對于在反饋環(huán)路中采用MEMS慣性測量單元(IMU) 的高性能運(yùn)動(dòng)控制系統(tǒng),傳感器對準(zhǔn)誤差常常是其關(guān)鍵考慮之一。對于IMU中的陀螺儀,傳感器對準(zhǔn)誤差描述各陀螺儀的旋轉(zhuǎn)軸與系統(tǒng)定義的"
2019-10-16 08:00:00
高度集成的精密 MEMS(微機(jī)電系統(tǒng))慣性傳感器 ADIS16334和 ADIS16375,可以幫助工業(yè)和醫(yī)療設(shè)備制造商更輕松地實(shí)現(xiàn)運(yùn)動(dòng)捕獲和控制功能。新款 IMU(慣性測量單元)實(shí)現(xiàn)了極高的精度
2018-11-02 15:56:38
能力。ADI將其專利的MEMS IP與業(yè)界領(lǐng)先的信號(hào)處理能力相結(jié)合,從而在高性能MEMS領(lǐng)域一枝獨(dú)秀。ADI慣性測量單元(IMU)解決了復(fù)雜航空電子系統(tǒng)中慣性傳感器的部署難題,此種部署必須依靠尺寸
2018-10-17 09:43:58
1000g 的沖擊。4. 測量范圍大 MEMS是否取代光纖陀螺儀技術(shù)光纖陀螺是繼激光陀螺巨大的進(jìn)步,屬于兩光陀螺,利用Sagnac效應(yīng),用光程差反算角速度,相比激光陀螺,體積小,成本低,精度可達(dá)千分之一
2018-10-23 10:57:15
慣性測量單元3DM-GX5-15 傳感器慣性測量單元3DM-GX5-15 傳感器詳詢請致電:*** 吳經(jīng)理工作q:1139878854LORD Microstrain Sensing system
2020-12-07 09:06:55
IMU - 慣性測量單元 iNEMO 慣性模塊:3D 加速度計(jì)和 3D 陀螺儀
2023-03-27 11:56:17
轉(zhuǎn)不停的轉(zhuǎn)子,作為其他運(yùn)動(dòng)物體的靜止錨定物。再回到MEMS陀螺儀,與傳統(tǒng)的陀螺儀工作原理有差異,因?yàn)椤拔⒌瘛?b class="flag-6" style="color: red">技術(shù)在硅片襯底上加工出一個(gè)可轉(zhuǎn)動(dòng)的立體轉(zhuǎn)子,并不是一件容易的事。MEMS陀螺儀陀螺儀利用
2021-04-09 07:00:00
轉(zhuǎn)不停的轉(zhuǎn)子,作為其他運(yùn)動(dòng)物體的靜止錨定物。再回到MEMS陀螺儀,與傳統(tǒng)的陀螺儀工作原理有差異,因?yàn)椤拔⒌瘛?b class="flag-6" style="color: red">技術(shù)在硅片襯底上加工出一個(gè)可轉(zhuǎn)動(dòng)的立體轉(zhuǎn)子,并不是一件容易的事。MEMS陀螺儀陀螺儀利用
2021-05-25 07:00:00
他慣性檢測結(jié)合起來,結(jié)果有助于改進(jìn)MEMS技術(shù)的實(shí)際應(yīng)用。實(shí)際上,這要求使用加速度計(jì)和陀螺儀。市場上已經(jīng)出現(xiàn)慣性測量單元,其中包括一個(gè)多軸加速度計(jì)、一個(gè)多軸陀螺儀,并且為了進(jìn)一步提高首向精度,還有一個(gè)多
2018-11-01 11:33:50
盡管MEMS(微機(jī)電系統(tǒng))技術(shù)在氣囊和汽車壓力傳感器中的應(yīng)用已有大約20年,但促使大眾認(rèn)識(shí)到慣性傳感器作用的是任天堂的 Wii?和Apple? iPhone?手機(jī)。然而,在一定程度上,流行的看法
2019-07-16 06:49:53
戴產(chǎn)品來說,應(yīng)用要求通常推動(dòng)著對復(fù)雜傳感器的需求,甚至已經(jīng)超越了最先進(jìn) MCU 中的傳感器。 WDK1.0 通過集成 ON Semi 基于 MEMS 的 FIS1100 慣性測量裝置 (IMU) IC
2018-07-18 16:03:06
FEBFIS1100MEMS_IMU6D3X,用于FIS1100 6D MEMS慣性測量單元(IMU)的評估板,帶有傳感器融合,用于指定系統(tǒng)級定向精度。將FIS1100與提供的XKF3 9D傳感器
2020-05-04 13:24:41
在技術(shù)應(yīng)用中測量傾斜度,加速度和振動(dòng)需要高精度的慣性傳感器:MEMS(微型機(jī)電系統(tǒng))系列傳感器采用單晶硅傳感器元件,融合最先進(jìn)的微機(jī)械加工技術(shù)。不同的微機(jī)械加工技術(shù)用于生產(chǎn),每種技術(shù)都有
2020-07-07 09:36:40
設(shè)計(jì)與優(yōu)化時(shí)需要正確理解MEMS的工作原理和建模機(jī)制。典型MEMS傳感器的檢測部分行為就像是一個(gè)二階集總式質(zhì)量塊(阻尼器)彈簧機(jī)械系統(tǒng),具有單一的諧振頻率,其傳遞函數(shù)如下: 其中Fin(s
2018-11-06 16:07:28
無錫瑞吉星電子的RJX-IMU-164系列;
參數(shù)如下:
一 、概述
RJX-IMU-16460高精度慣性測量單元是一款小型高精度MEMS慣性測量單元,可與ADIS-16460實(shí)現(xiàn)原位插拔替換、內(nèi)部
2024-01-18 13:46:16
基于 MEMS 的慣性測量裝置 (IMU) 可定義為系統(tǒng)級封裝。 它包括加速計(jì)機(jī)械感測元件、陀螺儀機(jī)械感測元件以及電子電路(“大腦”),以便將加速度和角速度轉(zhuǎn)換為可讀格式。 MEMS IMU 的開發(fā)
2017-03-31 12:31:30
ADIS16334和 ADIS16375是兩款高度集成的精密 MEMS(微機(jī)電系統(tǒng))慣性傳感器,可以幫助工業(yè)和醫(yī)療設(shè)備制造商更輕松地實(shí)現(xiàn)運(yùn)動(dòng)捕獲和控制功能。新款 IMU(慣性測量單元)實(shí)現(xiàn)了極高
2018-12-04 15:25:12
隱患。 為確保慣性傳感器工作的可靠性,必須將其正確安裝和定向。對于裝配慣性傳感器,有一套良好的設(shè)計(jì)實(shí)踐,只要應(yīng)用得當(dāng),可形成高性能系統(tǒng)。 裝配MEMS慣性傳感器的實(shí)用方法 從一開始就理解基本原理
2018-11-12 15:38:15
MEMS IMU解決方案】概述了這些屬性以及關(guān)鍵應(yīng)用條件。 什么是IMU?它代表慣性測量單元。 當(dāng)有人提到這個(gè)縮寫名稱時(shí),我們先看一下傳感器功能,它們能做什么。 想象一個(gè)笛卡爾坐標(biāo)系,形下圖所示
2019-01-04 10:23:47
請問如何理解SLAM用到的傳感器輪式里程計(jì)IMU、雷達(dá)、相機(jī)的工作原理?
2021-10-09 08:52:46
運(yùn)動(dòng)。 這就是所有慣性測量單元的根本出發(fā)點(diǎn),所有慣性導(dǎo)航系統(tǒng)都是據(jù)此而構(gòu)建。這些器件帶有一個(gè)三軸加速度計(jì),顯然這是指x軸、y軸和z軸。 加速度計(jì)會(huì)測量線性速度的變化,也會(huì)響應(yīng)重力。IMU中傳感器的功能
2018-11-01 11:18:23
微機(jī)電系統(tǒng)(MEMS)運(yùn)動(dòng)IC在走向更高的集成度、更小的芯片尺寸、更低的成本以及更高的性能和可靠性。這些趨勢在最新的加速度計(jì)、陀螺儀和慣性測量單元(IMU)上得到了體現(xiàn),使得MEMS器件得以滿足多種下一代電子產(chǎn)品,特別是消費(fèi)電子產(chǎn)品的需求。
2019-10-29 07:52:04
YIS370-U是一款輕量級、小尺寸、高精度、低功耗的工業(yè)級慣性測量單元,為無人智能化載體、穩(wěn)定平臺(tái)、導(dǎo)航控制等應(yīng)用提供精確的IMU原始角速率、加速度等信息。
2022-06-17 15:18:03
介紹了一種采用三極管作為測溫元件的慣性測量組件(IMU)實(shí)時(shí)測溫電路的工作原理。該電路采用自閉環(huán)的工作方式,將溫度值轉(zhuǎn)換為二進(jìn)制并行代碼,具有電路體積小,響應(yīng)快,
2009-07-04 15:52:59 31
31 開發(fā)一種生物運(yùn)動(dòng)微慣性測量裝置,以基于 ARM7 的LPC2129 為核心處理單元,采用MEMS 陀螺和MEMS 加速度計(jì)為測量傳感器。該裝置實(shí)現(xiàn)了對SPC-III 機(jī)器魚尾鰭拍動(dòng)參數(shù)的精確測量,為
2009-11-26 11:49:3017 ADIS16505-2BMLZ高性能慣性測量單元(IMU)的性能指標(biāo)解析摘要:本文將對ADIS16505-2BMLZ高性能慣性測量單元(IMU)的性能指標(biāo)進(jìn)行詳細(xì)解析,包括其工作原理、測量精度
2024-02-16 19:24:45
三極管開關(guān)電路工作原理解析
圖一所示是NPN三極管的 共射極電路,圖二所示是它的特性
2009-11-24 10:50:36270157 校驗(yàn)碼工作原理解析
元件故障噪聲干擾等各種因素常常導(dǎo)致計(jì)算機(jī)在處理信息過程中出現(xiàn)錯(cuò)誤。為了防止錯(cuò)誤,可將信號(hào)采用專門的邏輯線路進(jìn)行編碼以檢測錯(cuò)誤,甚
2010-04-13 14:16:072036 
Analog Devices, Inc.(ADI),最近正式全面推出ADIS16407 iSensor IMU(慣性測量單元),它在單個(gè)封裝中集成一個(gè)三軸陀螺儀、一個(gè)三軸加速度計(jì)、一個(gè)三軸磁力計(jì)和一個(gè)壓力傳感器。
2011-06-24 09:03:192025 提出了一種捷聯(lián)式慣性測量單元的設(shè)計(jì)與實(shí)現(xiàn)方法。該系統(tǒng)以開環(huán)光纖陀螺和硅微加速度計(jì)作為慣性敏感元件,采用高速DSP 作為中央處理器實(shí)現(xiàn)數(shù)據(jù)采集、處理及輸出。重點(diǎn)介紹了系統(tǒng)
2011-09-13 15:01:5020 ADI全球領(lǐng)先的高性能信號(hào)處理解決方案供應(yīng)商,最近正式全面推出第三代iSensor MEMS IMU(慣性測量單元)ADIS16488,這是一款戰(zhàn)術(shù)級10自由度(DoF)傳感器
2011-12-02 11:42:351937 MEMS慣性測量單元自動(dòng)校準(zhǔn)算法研究與實(shí)現(xiàn)
2015-11-25 10:22:4919 對于在反饋環(huán)路中采用MEMS慣性測量單元(IMU)的高性能運(yùn)動(dòng)控制系統(tǒng),傳感器對準(zhǔn)誤差常常是其關(guān)鍵考慮之一。
2016-11-05 03:56:253578 
基于MEMS陀螺和加計(jì)的微慣性測量單元研制
2016-12-17 16:33:3912 觸摸屏的應(yīng)用與工作原理解析
2017-02-08 02:13:1738 基于分度臺(tái)轉(zhuǎn)位裝置的慣性測量單元智能檢測_王斌
2017-01-12 22:48:461 正在將MEMS慣性測量單元(IMU)用于個(gè)人交通工具平臺(tái)的自平衡制導(dǎo)系統(tǒng),是否會(huì)有一款面向消費(fèi)者,能消除各傳感器之間的全部對齊誤差,并且所有核心傳感器元件都集成在單個(gè)芯片上的IMU?
2017-08-29 15:30:216599 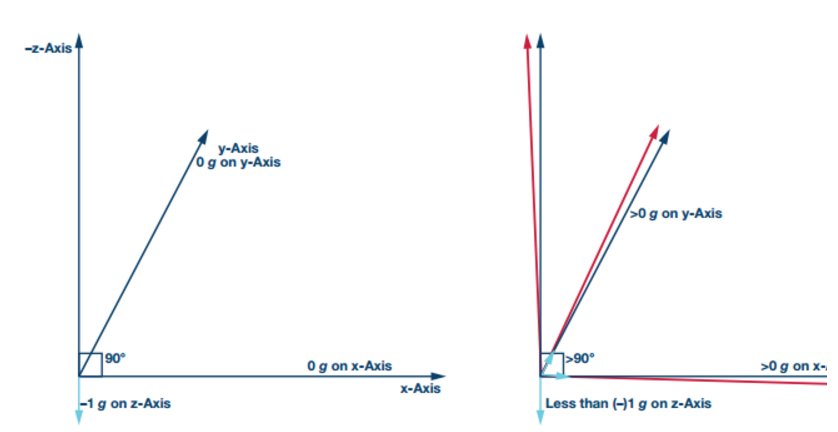
近年來,MEMS 慣性器件取得了飛速發(fā)展,基于 MEMS 慣性器件的慣導(dǎo)系統(tǒng)也逐漸成熟,應(yīng)用范圍越來越廣,特別是在航天和軍事上具有巨大的發(fā)展?jié)摿Α1疚年U述了 MEMS 慣性器件特點(diǎn)、發(fā)展過程及在航天
2017-10-19 14:50:0616 和加速度,并以此解算出物體的姿態(tài),在導(dǎo)航中用著很重要的應(yīng)用價(jià)值,慣性測量單元(IMU)PA-IMU-01D采用三個(gè)單軸的高精度MEMS陀螺儀和三個(gè)單軸的高精度MEMS加速度計(jì),通過信號(hào)調(diào)理
2018-04-27 16:33:471885 BM1160是高度集成的、低功率的慣性測量單元(IMU),它提供精確的加速度和角速率(陀螺)測量。
2018-09-21 08:00:0016 但是MEMS陀螺儀(gyroscope)的工作原理不是這樣的,因?yàn)橐梦C(jī)械技術(shù)在硅片襯底上加工出一個(gè)可轉(zhuǎn)動(dòng)的結(jié)構(gòu)可不是一件容易的事。MEMS陀螺儀利用科里奧利力——旋轉(zhuǎn)物體在有徑向運(yùn)動(dòng)時(shí)所受到的切向力。下面是導(dǎo)出科里奧利力的方法。有力學(xué)知識(shí)的讀者應(yīng)該不難理解。
2019-03-08 14:47:285260 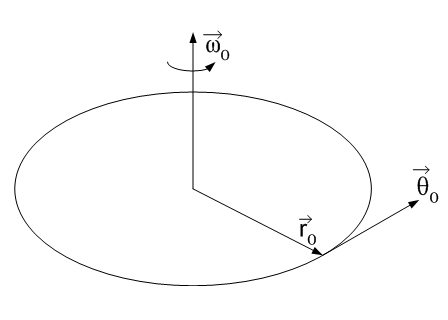
bmi160是一個(gè)高度集成的低功耗慣性測量單元(IMU),它提供特定的加速度和角速率(陀螺)測量。
2019-03-11 08:00:0083 使用模擬設(shè)備的慣性測量單元(IMU)傳感器ADIS16470和PNI的地磁傳感器RM3100構(gòu)建的捷聯(lián)慣性導(dǎo)航系統(tǒng)(SINS)。
2019-04-15 17:39:466828 
新納傳感系統(tǒng)有限公司(下稱“新納傳感”)今天在SENSOR CHINA2019推出了全新產(chǎn)品 OpenIMU330。作為一款基于MEMS技術(shù)的6-DOF三重冗余高精度慣性測量單元
2019-09-12 11:40:004414 慣性測量單元(Inertialmeasurementunit,簡稱IMU)被定義為“無需外部參考的可測量三維線運(yùn)動(dòng)及角運(yùn)動(dòng)的裝置”,即測量物體三軸姿態(tài)角(或角速率)以及加速度的裝置。
2020-01-23 11:49:003523 慣性測量單元(Inertialmeasurementunit,簡稱IMU)被定義為“無需外部參考的可測量三維線運(yùn)動(dòng)及角運(yùn)動(dòng)的裝置”,即測量物體三軸姿態(tài)角(或角速率)以及加速度的裝置。
2020-02-12 15:58:243698 慣性傳感器包括加速度計(jì)(也叫加速度傳感器)和角速度傳感器(也叫陀螺儀),以及它們的單、雙、三軸組合慣性測量單元(也稱IMU)和AHRS。這里我們著重介紹加速度計(jì)和陀螺儀。
2020-03-27 11:55:1713908 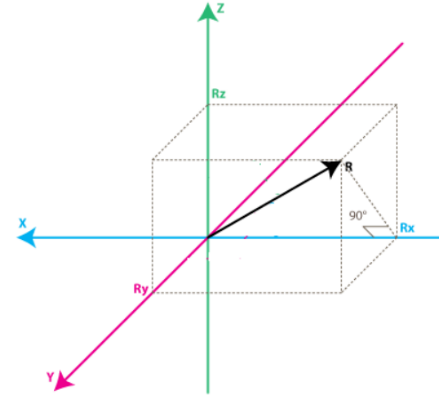
IMU慣導(dǎo)系統(tǒng)中都有什么? 這次主要根據(jù)我收集的一些慣性導(dǎo)航imu的一些知識(shí)資料來簡單講解一下這個(gè)各系統(tǒng)中都有哪些部件組成。 IMU慣性測量系統(tǒng)整個(gè)在是由一個(gè)金屬外殼封裝里面由一個(gè)IMU包含了三個(gè)
2020-03-30 16:38:161010 這個(gè)各系統(tǒng)中都有哪些部件組成。 IMU慣性測量系統(tǒng)整個(gè)在是由一個(gè)金屬外殼封裝里面由一個(gè)IMU包含了三個(gè)單軸的加速度計(jì)、三個(gè)單軸的陀螺、以及一些電路組成。 加速度計(jì)檢測物體在載體坐標(biāo)體系獨(dú)立三軸的加速度信號(hào),而陀螺檢測載體相對于導(dǎo)航坐標(biāo)系的角速度信號(hào)
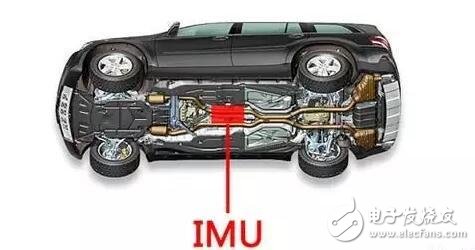
2020-06-15 11:12:441350 詳細(xì)解說IMU慣性測量單元 IMU可獲得載體的姿態(tài)、速度和位移等信息,被廣泛用于汽車、機(jī)器人領(lǐng)域,也被用于需要用姿態(tài)進(jìn)行精密位移推算的場合,如潛艇、飛機(jī)等慣性導(dǎo)航設(shè)備中。 基于MEMS技術(shù)的IMU
2020-06-11 11:00:131752 詳細(xì)解說IMU慣性測量單元 IMU可獲得載體的姿態(tài)、速度和位移等信息,被廣泛用于汽車、機(jī)器人領(lǐng)域,也被用于需要用姿態(tài)進(jìn)行精密位移推算的場合,如潛艇、飛機(jī)等慣性導(dǎo)航設(shè)備中。 基于MEMS技術(shù)的IMU
2020-06-01 11:22:016930 慣性測量單元的原理和應(yīng)用介紹 慣性測量單元是通過加速度計(jì)和陀螺儀測量運(yùn)動(dòng)載體的方位與姿態(tài)的裝置,它與AHRS的功能與裝置都很相像,但是最大的區(qū)別是航姿參考系統(tǒng)包含了嵌入式的姿態(tài)數(shù)據(jù)解算單元與航向信息
2020-06-01 11:09:294336 慣性測量單元的原理和應(yīng)用介紹 慣性測量單元是通過加速度計(jì)和陀螺儀測量運(yùn)動(dòng)載體的方位與姿態(tài)的裝置,它與AHRS的功能與裝置都很相像,但是最大的區(qū)別是航姿參考系統(tǒng)包含了嵌入式的姿態(tài)數(shù)據(jù)解算單元與航向信息
2020-06-08 17:24:232644 IMU和AHRS之間的區(qū)別 AHRS航姿參考系統(tǒng) 航姿參考系統(tǒng)包括基于MEMS的三軸陀螺儀,加速度計(jì)和磁強(qiáng)計(jì)。航姿參考系統(tǒng)與慣性測量單元IMU的區(qū)別在于,航姿參考系統(tǒng)(AHRS)包含了嵌入式的姿態(tài)
2020-04-20 11:02:132029 IMU慣性測量單元是什么? 慣性測量單元是測量物體三軸姿態(tài)角(或角速率)以及加速度的裝置。一般的,一個(gè)IMU包含了三個(gè)單軸的加速度計(jì)和三個(gè)單軸的陀螺,加速度計(jì)檢測物體在載體坐標(biāo)系統(tǒng)獨(dú)立三軸的加速度
2020-04-20 10:32:576231 IMU慣性測量單元是什么? IMU大多用在需要進(jìn)行運(yùn)動(dòng)控制的設(shè)備,如汽車和機(jī)器人上。也被用在需要用姿態(tài)進(jìn)行精密位移推算的場合,如潛艇、飛機(jī)、導(dǎo)彈和航天器的慣性導(dǎo)航設(shè)備等。 IMU的基組成 利用
2020-04-18 00:35:09740 IMU慣性測量單元的基本原理 IMU是測量物體三軸姿態(tài)角(或角速率)以及加速度的裝置。 其中一個(gè)IMU包含了三個(gè)單軸的加速度計(jì)和三個(gè)單軸的陀螺,加速度計(jì)檢測物體在載體坐標(biāo)系統(tǒng)獨(dú)立三軸的加速度信號(hào)
2020-04-26 15:26:353559 慣性測量單元的應(yīng)用 慣性測量單元用于安裝了慣性導(dǎo)航系統(tǒng)的交通工具。如今,幾乎每個(gè)商業(yè)或軍事船只都安裝了慣性測量單元。大多數(shù)飛機(jī)也配備了慣性測量單元。同時(shí),慣性測量單元也在飛行器中單獨(dú)使用,將慣性測量
2020-04-26 11:28:34731 慣性測量單元的應(yīng)用 慣性測量單元用于安裝了慣性導(dǎo)航系統(tǒng)的交通工具。如今,幾乎每個(gè)商業(yè)或軍事船只都安裝了慣性測量單元。大多數(shù)飛機(jī)也配備了慣性測量單元。同時(shí),慣性測量單元也在飛行器中單獨(dú)使用,將慣性測量
2020-04-26 11:19:071727 IMU慣性測量單元介紹 慣性測量單元的工作原理是:使用一個(gè)或多個(gè)加速度感應(yīng)器,探測當(dāng)前的加速度速率;使用一個(gè)或多個(gè)偏航陀螺儀,檢測在方向、翻滾角度和傾斜姿態(tài)上的變化。有一些慣性測量單元還同時(shí)包括
2020-06-08 14:29:334054 IMU慣性測量單元詳解 慣性測量單元的工作原理。慣性測量單元的工作原理是:使用一個(gè)或多個(gè)加速度感應(yīng)器,探測當(dāng)前的加速度速率;使用一個(gè)或多個(gè)偏航陀螺儀,檢測在方向、翻滾角度和傾斜姿態(tài)上的變化。有一些
2020-06-01 10:37:199178 該項(xiàng)目投資方為深迪半導(dǎo)體(上海)有限公司,項(xiàng)目計(jì)劃將公司總部遷至柯橋,并建立自主商用6軸MEMS慣性測量單元(IMU)、商用3軸磁力計(jì)測試和模組測試產(chǎn)線,以及車用6軸MEMS IMU封測產(chǎn)線。
2020-07-31 17:00:511439 IMU指的是慣性測量單元。IMU大多用在需要進(jìn)行運(yùn)動(dòng)控制的設(shè)備,如汽車和機(jī)器人上。也被用在需要用姿態(tài)進(jìn)行精密位移推算的場合,如潛艇、飛機(jī)、導(dǎo)彈和航天器的慣性導(dǎo)航設(shè)備等。
2020-11-20 15:24:1954523 等很多電子設(shè)備也有IMU傳感器的存在。 下面就來講講IMU中三軸加速計(jì)、三軸陀螺儀、三軸磁力計(jì)的工作原理。 ? 1 三軸加速度計(jì)三軸加速度傳感器是基于加速度的基本原理去實(shí)現(xiàn)工作。 1.測量比力三軸加速度計(jì)是一種慣性傳感器,能夠測量物體的比力,即去掉重力后的整體加速度或
2020-12-26 10:14:0912405 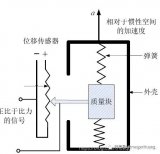
ADIS16490/ADIS16495/ADIS16497:戰(zhàn)術(shù)級慣性測量單元(IMU),具有業(yè)界最低的SWAP+C
2021-04-30 12:25:120 HG1125和HG1126采用MEMS慣性傳感器來精確測量運(yùn)動(dòng),是霍尼韋爾戰(zhàn)術(shù)級IMU工廠中最新的產(chǎn)品,該工廠每年向各個(gè)細(xì)分市場的客戶交付近100000套IMU產(chǎn)品,該系列產(chǎn)品的首批交付時(shí)間定于今年6月份。
2021-05-09 09:46:483364 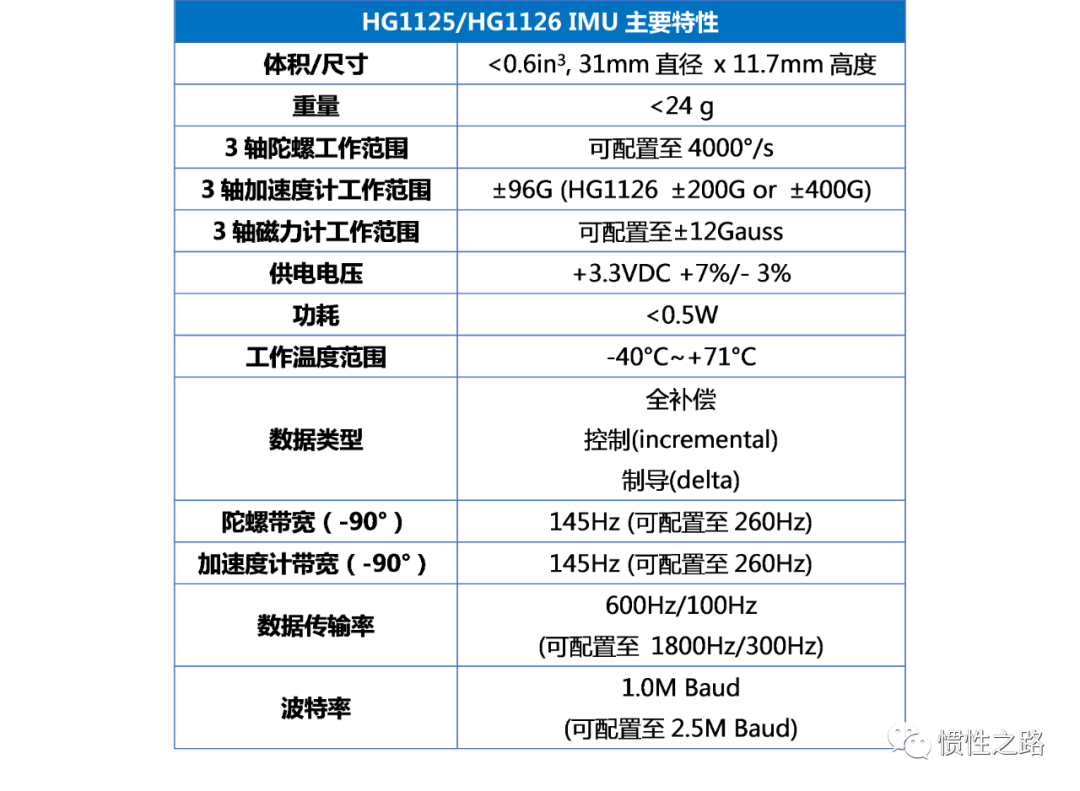
iSensor MEMS慣性測量單元(IMU)手冊
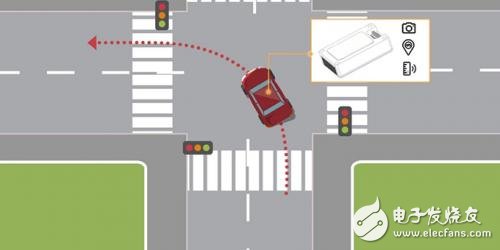
2021-05-24 09:37:1121 隨著自動(dòng)駕駛技術(shù)越來多地被人們所提及,相關(guān)的技術(shù)也在不斷的發(fā)展,各類高精度定位、傳感等技術(shù)得到了長足的發(fā)展,而其中有一個(gè)冉冉升起的新星,那就是IMU技術(shù)。這個(gè)技術(shù)的出現(xiàn)彌補(bǔ)了GPS定位的不足,兩者
2021-07-09 09:18:203891 應(yīng)用的——以MEMS為核心的智能傳感器,正處于爆發(fā)階段。MEMS傳感器的設(shè)計(jì)與制造依賴大規(guī)模微納制造技術(shù),基于此,深圳市微納制造產(chǎn)業(yè)促進(jìn)會(huì)開展MEMS微納制造系列調(diào)研,通過對核心器件市場應(yīng)用的研究,分析其背后微納制造技術(shù)的應(yīng)用,從而促進(jìn)微納制造技術(shù)的應(yīng)用及推廣。
2022-02-21 16:25:098469 
九軸慣性測量單元IMU_MPU6050中文數(shù)據(jù)手冊。
2022-03-07 16:31:472 IIM-46234模塊可以在精密應(yīng)用中提供很高的性能。另一方面,IIM-46230模塊能以較低的成本供貨,適用于不需要相同精度水平但仍需要方便、穩(wěn)健和準(zhǔn)確的慣性測量的應(yīng)用。
2022-05-05 11:31:343246 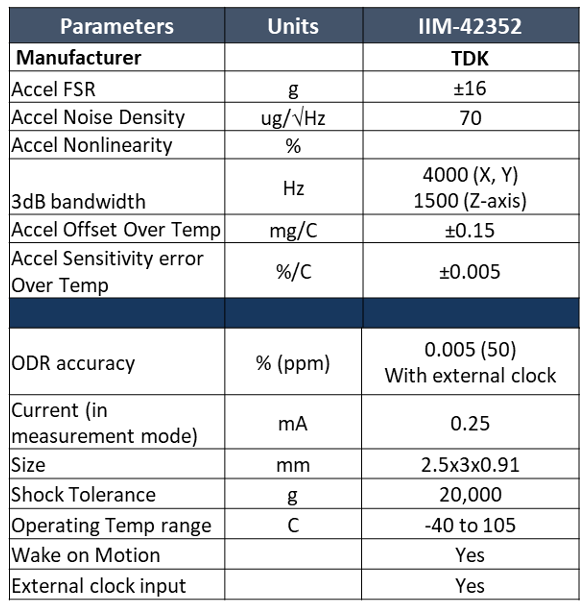
據(jù)麥姆斯咨詢介紹,慣性測量單元(Inertial Measurement Unit,IMU)是測量物體三軸姿態(tài)角(或角速率)以及加速度的裝置。通常,IMU內(nèi)部集成3軸陀螺儀和3軸加速度計(jì),以及運(yùn)動(dòng)/姿態(tài)算法。如果IMU內(nèi)部集成的傳感器采用MEMS技術(shù)實(shí)現(xiàn),那么可被稱為MEMS IMU。
2022-09-28 10:32:22786 電子發(fā)燒友網(wǎng)站提供《使用arduino/genuino 101的板載慣性測量單元(IMU)教程.zip》資料免費(fèi)下載
2022-12-19 09:35:230 直接使用慣性測量單元 (IMU)
2022-12-28 09:51:22750 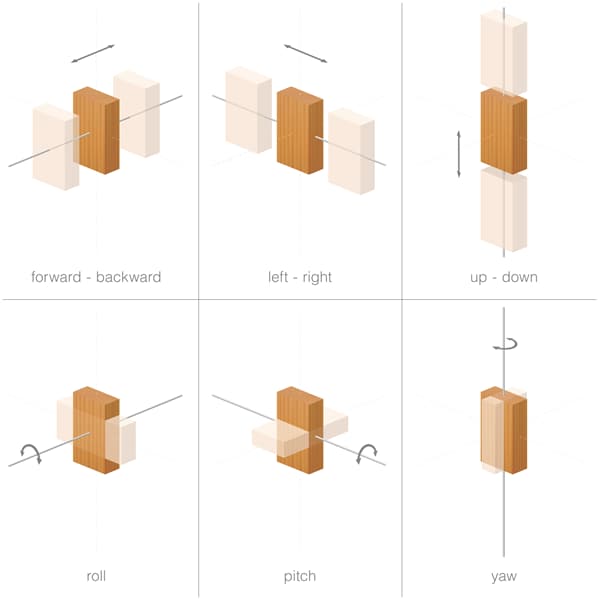
什么是晶振 晶振工作原理解析
2022-12-30 17:13:573726 
傳感器未對準(zhǔn)通常是在其反饋回路中使用MEMS慣性測量單元(IMU)的高性能運(yùn)動(dòng)控制系統(tǒng)的關(guān)鍵考慮因素。對于IMU中的陀螺儀,傳感器未對準(zhǔn)描述了每個(gè)陀螺儀的旋轉(zhuǎn)軸與系統(tǒng)定義的慣性參考系(也稱為全局系)之間的角度差。
2023-01-08 20:05:193512 
? 倍加福推出全新慣性測量單元IMU F99系列,實(shí)現(xiàn)動(dòng)態(tài)應(yīng)用中更準(zhǔn)確的傾角檢測,它采用了速度傳感器和陀螺儀的創(chuàng)新組合,有效補(bǔ)償外部加速度。通過傳感器內(nèi)置的融合算法,可對各種應(yīng)用和運(yùn)動(dòng)模式進(jìn)行配置
2023-01-13 13:39:571605 理想情況下,陀螺儀和加速度計(jì)中的多個(gè)軸相互正交。然而,一個(gè)常見的誤解是,由于多軸陀螺儀或加速度計(jì)可以在一個(gè)分立的MEMS組件內(nèi)設(shè)計(jì),因此每個(gè)軸彼此成90°完全正交。盡管這些設(shè)備中的所有慣性傳感器
2023-02-16 11:42:22603 
據(jù)麥姆斯咨詢報(bào)道,近期,新納傳感(ACEINNA)宣布高性能慣性測量單元(IMU)IMU330RA全面上市。
2023-04-26 10:21:361141 
IMU原理慣性測量單元(IMU)通常指由3個(gè)加速度計(jì)和3個(gè)陀螺儀組成的組合單元,加速度計(jì)和陀螺儀安裝在互相垂直的測量軸上。低精度的IMU可以通過其他方式修正,GPS用于修正位置的長期漂移,氣壓計(jì)用于
2021-09-17 17:30:551449 
航向姿態(tài)參考系統(tǒng)(英文簡稱AHRS)和慣性測量單元(英文簡稱IMU)的聯(lián)系與區(qū)別
2021-12-17 14:10:36736 
越來越多的機(jī)器人系統(tǒng)配備了多個(gè)慣性測量單元(IMU)。由于競爭性目標(biāo),當(dāng)用于控制時(shí)期望靠近重心,或者在與外部感知傳感器集成時(shí)為了獲得無阻礙的視野,單個(gè)IMU經(jīng)常被安裝在相當(dāng)遠(yuǎn)的距離上。
2023-07-08 09:41:451103 
據(jù)麥姆斯咨詢報(bào)道,近期,無錫凌思科技有限公司(簡稱:凌思科技)宣布其開發(fā)的IMU500高精度汽車級MEMS慣性測量單元(IMU)已開始批量生產(chǎn)。
2023-07-14 10:17:26338 TAC-440 IMU的突破性性能基于EMCORE成熟的石英MEMS慣性傳感器技術(shù)。EMCORE的石英技術(shù)結(jié)合了石英材料固有的大信號(hào)輸出和熱穩(wěn)定性,可重復(fù)、大批量生產(chǎn)精密加工的傳感器結(jié)構(gòu)。
2023-09-15 11:48:12140 慣性測量單元(英語:Inertialmeasurementunit,簡稱IMU)是測量物體三軸姿態(tài)角(或角速率)以及加速度的裝置。一般的,一個(gè)IMU內(nèi)會(huì)裝有三軸的陀螺儀和三個(gè)方向的加速度計(jì),來測量
2023-11-04 08:30:18184 
村田MEMS慣性測量單元(IMU)SCHA634產(chǎn)品分析
2023-11-27 16:27:32387 
億元。目前國產(chǎn)高性能三軸芯片自主可控已突破,放量在即百億市場有望迎來爆發(fā) ○IMU(慣性測量單元)通過測量物體加速度和角速度的變化來推算出物體在三維空間中的位置和姿態(tài)。目前高精度MEMS IMU民用市場,主要應(yīng)用場景包括高精度自動(dòng)駕駛以及人形機(jī)器人。 ○
2023-11-23 09:19:11416 M-G370PDS0是一個(gè)小的形狀因子慣性測量單元(IMU),具有6個(gè)自由度:三軸角率和線性加速度,并提供高穩(wěn)定性和高精度的測量能力精密補(bǔ)償技術(shù)。各種校準(zhǔn)參數(shù)被存儲(chǔ)在IMU的存儲(chǔ)器中,并且是
2024-01-11 09:55:450 一般描述M-G552PJ1是一個(gè)小的形狀因子慣性測量單元(IMU),具有6個(gè)自由度:三軸角速率和線性加速度,并提供了高穩(wěn)定性和高精度的測量能力與使用的高精度補(bǔ)償技術(shù)。通過控制器局域網(wǎng)(CAN)接口
2024-01-12 10:56:270 關(guān)于慣性測量單元的應(yīng)用場景闡述
2024-01-19 11:25:22288
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論