") IMU系統(tǒng)簡(jiǎn)介
IMU系統(tǒng)簡(jiǎn)介
- IMU原理
慣性測(cè)量單元(IMU)通常指由3個(gè)加速度計(jì)和3個(gè)陀螺儀組成的組合單元,加速度計(jì)和陀螺儀安裝在互相垂直的測(cè)量軸上。低精度的IMU可以通過其他方式修正,GPS用于修正位置的長(zhǎng)期漂移,氣壓計(jì)用于修正高度,磁力計(jì)用于修正姿態(tài)。
傳感器直接固聯(lián)在載體上稱為捷聯(lián)慣導(dǎo)系統(tǒng)。
MEMS陀螺儀原理
加速度計(jì)原理
MPU6050
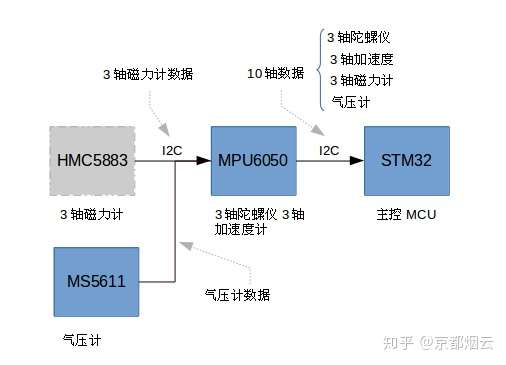
MPU-60x0是全球首例9軸運(yùn)動(dòng)處理傳感器。它集成了3軸MEMS陀螺儀,3軸MEMS加速度計(jì),以及一個(gè)可擴(kuò)展的數(shù)字運(yùn)動(dòng)處理器DMP(Digital Motion Processor),可用I2C接口連接一個(gè)第三方的數(shù)字傳感器,比如磁力計(jì)。擴(kuò)展之后就可以通過其I2C或SPI接口輸出一個(gè)9軸的信號(hào)(SPI接口僅在MPU-6000可用)。MPU-60x0也可以通過其I2C接口連接非慣性的數(shù)字傳感器,比如壓力傳感器。

MPU-60x0對(duì)陀螺儀和加速度計(jì)分別用了三個(gè)16位的ADC,將其測(cè)量的模擬量轉(zhuǎn)化為可輸出的數(shù)字量。為了精確跟蹤快速和慢速的運(yùn)動(dòng),傳感器的測(cè)量范圍都是用戶可控的,陀螺儀可測(cè)范圍為±250,±500,±1000,±2000°/秒(dps),加速度計(jì)可測(cè)范圍為±2,±4,±8,±16g。一個(gè)片上1024字節(jié)的FIFO,有助于降低系統(tǒng)功耗。和所有設(shè)備寄存器之間的通信采用400kHz的I2C接口或1MHz 的SPI接口(SPI僅MPU-6000可用)。對(duì)于需要高速傳輸?shù)膽?yīng)用,對(duì)寄存器的讀取和中斷可用20MHz的SPI。另外,片上還內(nèi)嵌了一個(gè)溫度傳感器和在工作環(huán)境下僅有±1%變動(dòng)的振蕩器。
在crazepony上,MPU6050/HMC5883/MS5611傳感器之間的連接如下圖所示。
-
IMU
+關(guān)注
關(guān)注
6文章
337瀏覽量
46444
發(fā)布評(píng)論請(qǐng)先 登錄
ST的IMU和地磁計(jì)用motionfx庫融合后航向角異常的原因?
IMU與壓電薄膜傳感器在機(jī)器人領(lǐng)域的應(yīng)用
革新無人機(jī)導(dǎo)航:如何重新定義IMU高性能低成本
探索未知,IMU助力精準(zhǔn)導(dǎo)航
EV2010評(píng)估系統(tǒng)產(chǎn)品簡(jiǎn)介

集性能與成本于一身的IMU,讓無人機(jī)飛行更穩(wěn)定

高精度IMU助力石油礦業(yè)精準(zhǔn)作業(yè)

從姿態(tài)到飛行控制,IMU全方位守護(hù)無人機(jī)飛行

近鉆頭安裝,高精度IMU實(shí)時(shí)精準(zhǔn)鉆井測(cè)量
EPSON新品IMU傳感器M-G570PR投產(chǎn),功能更強(qiáng)大!






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論