電子發燒友網站提供《精密微型MEMS IMU ADIS16505-2bmlz數據手冊.pdf》資料免費下載
2024-03-18 09:38:24 0
0 精工愛普生公司(TSE:6724,“愛普生”)開發了M-G370PDG(“M-G370G”),擴展了其慣性測量單元1(IMU)陣容,該IMU配備了高性能的六自由度傳感器。M-G370G將于2023
2024-02-27 14:36:31 119
119 
ADIS16550BMLZ高性能慣性測量單元(IMU)性能指標解析大家好,我是來自深圳市華灃恒霖電子的芯片銷售員。今天,我想和大家分享一款備受矚目的高性能慣性測量單元(IMU
2024-02-16 21:55:26
ADIS16505-2BMLZ高性能慣性測量單元(IMU)的性能指標解析摘要:本文將對ADIS16505-2BMLZ高性能慣性測量單元(IMU)的性能指標進行詳細解析,包括其工作原理、測量精度
2024-02-16 19:24:45
無錫瑞吉星電子的RJX-IMU-164系列;
參數如下:
一 、概述
RJX-IMU-16460高精度慣性測量單元是一款小型高精度MEMS慣性測量單元,可與ADIS-16460實現原位插拔替換、內部
2024-01-18 13:46:16
一般描述M-G552PJ1是一個小的形狀因子慣性測量單元(IMU),具有6個自由度:三軸角速率和線性加速度,并提供了高穩定性和高精度的測量能力與使用的高精度補償技術。通過控制器局域網(CAN)接口
2024-01-12 10:56:270 一般描述 M-G370PDF1是一個小的形狀因子慣性測量單元(IMU),具有6個自由度:三軸角速率和線性加速度,并提供了高穩定性和高精度的測量能力與使用高精度補償技術。各種校準參數被存儲在IMU
2024-01-11 17:00:110 M-G370PDS0是一個小的形狀因子慣性測量單元(IMU),具有6個自由度:三軸角率和線性加速度,并提供高穩定性和高精度的測量能力精密補償技術。各種校準參數被存儲在IMU的存儲器中,并且是
2024-01-11 09:55:450 當日,賽萊克斯北京獲得了某客戶的采購訂單,開始對首批MEMS-IMU 8英寸晶圓進行小批量生產。IMU是慣性測量定位中的核心部件,主要負責測量三軸姿態角和加速度。
2024-01-02 09:44:37281 的時候,讀到的數據都是0x10,我上午嘗試了一下軟件復位和充值adis16210的默認值后,發現讀到的數據變成了0x2a,無論如何改變傳感器的狀態,都不能對讀取的傳感器數據有任何影響。實在是搞不懂什么原因了,請幫忙解惑!謝謝!
2024-01-02 06:22:51
ADIS16488數據接口只能支持SPI協議嗎?能否配置成I2C?
還有引腳1、2、7、9,是DIO3 DIO4 DIO1 DIO2數字輸入輸出,這四個引腳可否配置成串口232的輸入和輸出
2024-01-01 07:55:56
我使用STM32單片機與ADIS16488通過SPI通信,連接圖和官方手冊一樣,其中23引腳實時時鐘電源和9引腳數據就緒我沒有接,因為我不需要用外部時鐘和數據就緒信號,我是在初始化各個引腳后,先去用
2024-01-01 07:47:42
當使用 ADIS 16488 獲取原始數據時, 我發現當 ADIS 16488 是靜態時, 陀螺儀的輸出噪聲太大。 您的參考文獻是 ATIS 16488 的音調值附在下面。 從圖中可以很容易看到輸出
2024-01-01 07:00:46
請問:
1.ADIS16488在使用外部同步時鐘時,可以使用FIR嗎?
2.對不同的FIR對外部時鐘頻率有要求嗎?
3.配置完FIR后對輸出頻率是否有影響?
4.從我給出同步時鐘,到最后
2023-12-29 08:29:02
最近用到一塊ADIS16488BLMZ模塊,但是上電后,其工作電流很小,并且SPI接口不通訊。我用上位機給模塊發送0x7E00后,模塊的DOUT接口始終保持低電平。不是是何原因,特此請教
2023-12-29 07:56:07
ADIS16228 或者 ADIS16227
是否可以用于0~10hz以內的低頻振動信號檢測?(FFT數據處理及輸出)
另外是否支持在AUTO-FFT模式的同時,既可以獲得當前加速度值又可以同時獲得當前處理的FFT結果。?
2023-12-29 07:28:40
ADIS16 IMU2和ADIS1644X/FLEX在哪可以買到,自己做的話兩個電容是多大的,兩排管腳什么型號,有沒有關于ADIS16IMU2的詳細資料
2023-12-29 07:14:24
我用adis16365做一款捷聯慣導,測試時發現靜止時或較小的晃動過后adis16365的陀螺漂移比較小,大約零點幾度每秒,但較大的晃動后再靜止,漂移變大,能達到約10度每秒,不知是什么原因,是adis16365出問題了嗎?還是電路設計有問題?謝謝。
2023-12-29 06:59:31
ADIS16488輸出異常!尋求技術人員幫助。
下圖為16488加速度X在雙軸轉到繞Y軸翻轉,敏感重力加速度的分量輸出過程。另外其他軸表現同樣現象
問題:翻轉過程中,為什么出現階梯狀,是不是內部自補償引起的??還望解答。謝謝
2023-12-29 06:49:39
您解釋指導;
2.ADIS16006加計采樣頻率如果超過10k會發生采樣錯誤,而輸入的時鐘頻率最小是10KHz,如果CS引腳一直是低電平,是不是把時鐘頻率設為160KHz可能造成采樣錯誤?
謝謝!
2023-12-29 06:42:39
想知道ADIS16375這款IMU的輸出角度是個什么樣的角度?是不是姿態角?其參考坐標系是什么?輸出角的實時精度是多少?ADIS16365、ADIS16334、ADIS16445、ADIS16485這四款IMU能夠輸出角度嗎?若果能,分別是什么樣的角度?其參考坐標系分別是什么?謝謝!
2023-12-29 06:17:47
1、ADIS16365與ADIS16460哪個漂移比較少,精度比較高?
2、能否提供ADIS16365的驅動代碼?
2023-12-29 06:00:44
近期由于課題需要購買了型號為ADIS16470的MEMS-IMU產品,嘗試使用后得到了數據結果,但有如下問題。
1靜態實驗下,得到的陀螺儀數據單位若是°/s,則明顯量級過大,遠大于地球自轉
2023-12-28 08:18:21
您好!
我使用STM32F103的SPI接口與ADIS6465通信,試圖讀取product-ID(addr=0x72),但結果大多時候都不正確,極少數時候會得到正確結果0x4051。
錯誤的時候得到
2023-12-28 08:16:22
我想徹底地恢復ADIS16488的設置,包括將各個寄存器恢復到初始化設置、進行工廠校準恢復、以及清除閃存等等。
我在GLOB_CMD寄存器里面看到了幾個標志位,有恢復軟件復位、工廠校準恢復等標志位
2023-12-28 08:09:41
配置imu,后直接讀取傳感器的數據,debug看數據的話,數據明顯不對,這個是什么問題;tips:在配置的時候進行了恢復工廠校準。第一張圖是配置imu,第二張是讀取數據,第三張是實時顯示讀取的數據,imu放在桌子上,三軸的角速度都不對,加速度值是對的
2023-12-28 08:09:02
大家好,最近我在使用ADIS16448做IMU和GPS的融合。IMU主要是完成卡爾曼濾波里預測的步驟,所以我需要為我的IMU設置系統噪聲參數Q。然而在ADIS16448的參數表里,我似乎找不到相應
2023-12-28 08:04:44
大家好,我的ADIS16405傳感器最開始數據讀取時準確正常的,后來不小心電路板不知道哪里短路,數據依然能夠讀取,但導致ADIS16405數據讀取有問題,在沒有動作的情況下讀出來的數據如下:
在
2023-12-28 07:39:18
使用單片機通過spi讀取adis16488A的9軸數據,讀取慢的時候(10hz)可以正常讀取。讀的快的話(100hz),前幾秒數據是對的,之后全變0或常數。spi時鐘1mhz。
上電后mcu控制
2023-12-28 07:38:50
通過eval-adis開發板向adis16488的DEC_RATE寫入數值修改采樣頻率,查詢無誤,但重新上電后總是變回默認的數值,是否需要其他操作
2023-12-28 07:35:52
我使用F28335與ADIS16488通過SPI通信,連接圖和官方手冊一樣,供電為3.3V,先去用SPI讀取傳感器的PROD_ID,按照手冊上寫的,如果讀取為0X4068,則代表SPI協議讀取正確
2023-12-28 07:35:38
我現在采集到的ADIS16477-2的imu數據,測試陀螺、加速度計的漂移非常大,IMU是放在臺面上鏡子不動的。
下圖第一排陀螺x、y、z的原始數據,第二排分別是5s鐘平滑后的數據。
下圖第一排
2023-12-28 07:25:03
在使用ADIS16365的過程中,我們使用ADIS16365的默認系統設置,讀取陀螺儀的測量值。
為了驗證讀數是否正確,在讀取陀螺儀的過程中將ADIS16365分別繞x軸,y軸,z軸轉動360度
2023-12-28 07:05:22
用EVAL-ADIS評估板對ADIS16488A數據采集時數據時是正常的,過些時間數據發生錯誤,所有寄存器的值都變成FFFF,重新插拔16488到評估板上可能還好用,但過些時間又發生同樣的問題,如圖所示,請問這是什么原因那?
2023-12-28 07:01:35
在使用MEMS慣性測量單元ADIS16477時,靜止狀態下所測量的數據變化范圍很小,同時在平滑路面上進行動態測試效果也還不錯,今本上和ADIS16375數據接近x和z軸方向加速度在±3°,但在比較抖
2023-12-28 06:51:23
我這邊在調試ADIS16477時遇到幾個問題需要咨詢一下:
1、在ADIS477通過SPI通信與STM32F4進行通信的時候,在對ADIS16477加入了軟件復位的控制寄存器,并按照手冊加入
2023-12-28 06:42:31
ADIS16488或者16480中,有關加速度計的輸出都是多少g,請問這個g等于多少m/s^-2,是9.8還是9.78還是多少?有沒有一個確定的值?
2023-12-28 06:37:37
在調試ADIS16375過程中發現有一定概率(大約6個中間有一個)出現讀到的數據全0的情況(包括角速率、加速度、溫度及ID(實際應為16375)),特別在快速溫度變化(以6℃/min降溫過程中)尤其明顯,不知道有誰曾經遇見此問題,是IMU自身問題還是需要特殊設置?
2023-12-28 06:33:59
)
{
Read_ADIS16209_Data(XINCL_OUT,XINCL_OUT_DATA);
HAL_Delay(10);
Read_ADIS16209_Data(YINCL_OUT
2023-12-28 06:25:51
親愛的工程師您好,就是我在使用評估板過程中遇到一些問題,感謝您的解答:
1. ADIS16488對應的評估板可以將角速度和加速度的信息按照某種協議經串口輸出來嗎?
2. 如果不能輸出來,那我們使用者該如何做才能達到這個要求?
-
2023-12-28 06:04:22
1、我們開發的系統是運行在windows平臺下的,現在需要添加IMU單元,請問這個能怎么通過USB連接PC或以太網口直接獲取imu傳感器的數據呢?
2、請問你們的有相應的開發SDK嗎?
2023-12-27 06:15:18
激光跟蹤儀與空間姿態探頭(iProbe 6D姿態探頭)配合使用,就組成六自由度激光跟蹤儀。它能夠根據合作目標的精確空間姿態對被測工件的內部特征、隱藏特征或曲面等復雜特征進行快速、高精度的測量。
2023-12-12 09:39:51287 
村田MEMS慣性測量單元(IMU)SCHA634產品分析
2023-11-27 16:27:32387 
電子發燒友網站提供《ADI公司突破性的微機電系統(MEMS)開關技術.pdf》資料免費下載
2023-11-27 09:52:201 來源:華安機械 分析師張帆,謝謝 編輯:感知芯視界 萬仞 獲取最新IMU行業研究報告,可在感知芯視界首頁對話框,回復“IMU”免費下載。 【摘要】 ○預計高性能MEMS IMU市場規模最高達100
2023-11-23 09:19:11416 中圖儀器牽頭的國家重點研發計劃——“六自由度激光自動精準跟蹤測量關鍵技術"的項目綜合績效評價會議在深圳順利召開。本項目瞄準我國航空航天、汽車船舶、軌道交通、機器人、核電、大科學裝置等裝備制造領域
2023-10-27 11:27:00
近年來,一些端到端學習方法被提出以增強六自由度物體定位的魯棒性,包括:直接回歸幾何參數;采用渲染 - 比對來迭代地優化位姿。盡管基于學習的方法具有潛力,但是直接回歸法精度有限、泛化能力差
2023-10-16 17:13:21319 
GTS六自由度激光自動精準跟蹤測量儀是高精度、便攜式的空間大尺寸坐標測量機,是同時具高精度(μm級)、大工作空間(百米級)的高性能光電測量儀器,被廣泛應用在飛機、汽車、船舶、航天、機器人、核電
2023-10-12 09:26:16
電子發燒友網站提供《多自由度仿生假手嵌入式控制系統及其抓取策略.pdf》資料免費下載
2023-10-10 11:18:381 電子發燒友網為你提供ADI(ADI)ADIS16550: 自治等級,6度自由不感官自由6度數據表相關產品參數、數據手冊,更有ADIS16550: 自治等級,6度自由不感官自由6度數據表的引腳
2023-10-09 18:50:05

TAC-440 IMU的突破性性能基于EMCORE成熟的石英MEMS慣性傳感器技術。EMCORE的石英技術結合了石英材料固有的大信號輸出和熱穩定性,可重復、大批量生產精密加工的傳感器結構。
2023-09-15 11:48:12139 廣。 ? MEMS 重要類別——IMU ? 慣性測量單元一直是MEMS市場里重要的產品類型,主要包括加速度計、陀螺儀和磁力計。如今,由分立的慣性測量單元組合成的三軸、六軸、九軸IMU,將加速度傳感器、陀螺儀、磁傳感器等MEMS器件集成在一起,以滿足生產
2023-08-01 00:08:001007 GTS6000激光跟蹤儀與空間姿態探頭配合組成六自由度激光跟蹤儀,能夠根據合作目標的精確空間姿態對被測工件的內部特征、隱藏特征或曲面等復雜特征進行快速、高精度的測量。
2023-07-21 10:58:58402 
ADIS16488A iSensor?是一款完整的慣性系統,內置一個三軸陀螺儀、一個三軸加速度計、一個三軸磁力計和一個壓力傳感器。每個慣性傳感器都實現了業界領先的iMEMS?技術與信號
2023-07-21 10:47:15
ADIS16467 是一款精密微電子機械系統 (MEMS) 慣性測量單元 (IMU),它包括一個三軸陀螺儀和一個三軸加速度計。 ADIS16467 中的每個慣性傳感器均結合了信號調節功能以優化動態
2023-07-21 10:18:16
ADIS16465 是一款精密微電子機械系統 (MEMS) 慣性測量單元 (IMU),它包括一個三軸陀螺儀和一個三軸加速度計。 ADIS16465 中的每個慣性傳感器均結合了信號調節功能以優化動態
2023-07-21 10:15:52
ADIS16477是一款精密、微型MEMS慣性測量單元(IMU),內置一個三軸陀螺儀和一個三軸加速度計。ADIS16477中內置的每個慣性傳感器都結合了信號調理技術,可優化動態性能。工廠校準針對各
2023-07-21 10:01:16
ADIS16507 是一款精密的微型微機電系統 (MEMS) 慣性測量單元 (IMU),它包括一個三軸陀螺儀和一個三軸加速度計。ADIS16507 中的每個慣性傳感器均
2023-07-21 09:53:45
ADIS16505 是一款精密的微型微機電系統 (MEMS) 慣性測量單元 (IMU),它包括一個三軸陀螺儀和一個三軸加速度計。ADIS16505 中的每個慣性傳感器均結合了可優化動態性能的信號調節
2023-07-21 09:50:40
ADIS16500 是一款精密的微型微機電系統 (MEMS) 慣性測量單元 (IMU)。它包括一個三軸陀螺儀和一個三軸加速度計。ADIS16500 中的每個慣性傳感器均結合了可優化動態性能的信號調節
2023-07-21 09:47:47
ADIS16260/ADIS16265均為可編程數字陀螺儀 , 集業界領先的MEMS和信號處理技術于一體 , 采用緊湊型單封裝 。 這些
2023-07-18 14:40:45
ADIS16260和ADIS16265可編程數字陀螺儀在單個緊湊型封裝內集成了業界領先的MEMS和信號處理技術,具有同類MEMS陀螺儀需要全動校準才能達到的精度性能。接通電源后,無需從系統處理器發出
2023-07-18 14:33:06
ADIS16136 iSensor? MEMS 陀螺儀是一款高性能、數字陀螺儀檢測系統,自治工作,無需用戶配置便可產生精確的速率檢測數據。其性能優勢包括低噪聲密度、寬帶寬和出色的運動中偏置
2023-07-18 13:48:07
據麥姆斯咨詢報道,近期,無錫凌思科技有限公司(簡稱:凌思科技)宣布其開發的IMU500高精度汽車級MEMS慣性測量單元(IMU)已開始批量生產。
2023-07-14 10:17:26338 電子發燒友網站提供《Scorbot ER-V+自由度機器人手臂控制器和模擬器設計.zip》資料免費下載
2023-07-10 15:08:570 Ericco的MEMS陀螺儀根據軸數分為單軸、雙軸和三軸。它分為工業級、戰術級(ER-MG-056、ER-MG-067)和導航級(ER-MG2-50/100、ER-MG2-300/400)。戰術
2023-07-07 10:16:472079 線性2自由度汽車模型是汽車操縱穩定性分析中最簡單、最典型的模型。
2023-06-28 16:52:311166 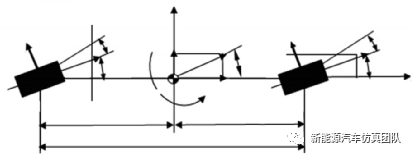
本期采用Simulink建立汽車2自由度動力學模型。為了便于掌握汽車穩定性的基本特性,對汽車簡化為線性二自由度的汽車模型,忽略轉向系統的影響,直接一前輪轉角作為輸入;忽略懸架的作用,認為汽車車廂只作用于地面的平面運動。
2023-06-28 16:39:131100 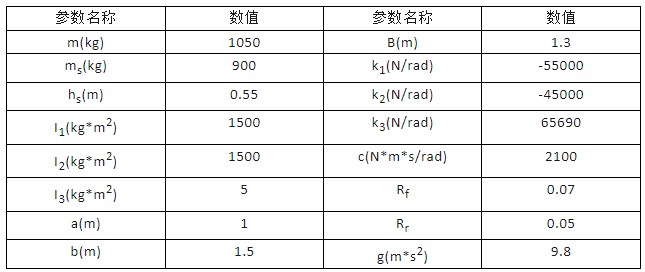
本文示例將實現4自由度并聯機器狗行走的功能。
2023-06-18 10:49:20466 
本文實例將實現2自由度并聯仿生腿模組運動起來,模擬實現狗腿行走的動作。
2023-06-18 10:35:20296 
萬物互聯時代,只要需要感知的領域,都需要傳感器。MEMS慣性傳感器應用到汽車上,就化身成汽車“五官”,實時檢測和測量加速度、傾斜、旋轉和多自由度運動,精確完成“全天候”定位定向。
2023-06-14 15:43:19459 1. 功能說明 ? ? ? ?本文示例將實現R328a樣機4自由度并聯機器狗下蹲的功能。 2. 結構說明 ? ? ? 本樣機的并聯驅動結構與 【R082】4自由度并聯四足 類似,兩款樣機可以
2023-06-09 11:10:51368 
人的手臂(腕關節到肩關節)有幾個自由度?我想絕大部分人都沒有想過,更別說去了解有哪幾個自由度,即使是學工科的人,也未必能解釋清楚。沒想到知乎上居然有人把這個問題回答的這么專業有內涵,同時又那么有哲理,忍不住想要把這個答案分享一下。
2023-06-07 15:48:16795 
我們對蜂群戰術和狼群戰術早已并不陌生,無人機蜂群和狼群戰術使用也屢見不鮮。而美軍對無人機蜂群戰術和狼群戰術的研究我們也有所涉及,并且相對應地進行借鑒完善,推出了我國自己的無人機戰法。
2023-06-01 12:38:091258 隨著機器人變得日益成熟,它們已經能夠應用到處理越來越多的工業工序。6自由度(6Dof)機器人能夠執行復雜的動作,因而可以在許多復雜的工業任務當中展示良好的性能,比如碼垛、搬運、涂膠和焊接等。6自由度機器人可以提舉和靈活地操縱重型載荷,并通過復雜的幾何運動對載荷進行精確操控。
2023-05-18 17:34:21720 
據麥姆斯咨詢報道,近期,新納傳感(ACEINNA)宣布高性能慣性測量單元(IMU)IMU330RA全面上市。
2023-04-26 10:21:361140 
基于三維模型的視覺定位通過在查詢圖像和三維模型間建立 2D-3D 對應關系,估計相機六自由度的位姿。傳統的視覺定位方法通常采用人工設計的局部特征,如 SIFT,來實現 2D-3D 匹配,并結合圖像檢索技術,將匹配范圍限制在查詢圖像的可見區域,以適應大規模場景的需求。
2023-04-20 10:07:05783 ADIS16507-2BMLZ
2023-04-06 23:32:07
EVALBOARDFORADIS16IMU4
2023-03-30 12:04:37
ADIS1613x, ADIS1636x, ADIS16375, ADIS1640x, ADIS1648x - Breakout Board
2023-03-30 12:04:17
BOARD EVALUATION FOR ADIS16260
2023-03-30 11:59:10
10 DOF MEMS IMU SENSOR
2023-03-30 11:58:21
BOARD EVALUATION ADIS16003
2023-03-30 11:58:16
BOARD EVAL FOR ADIS16209
2023-03-30 11:58:02
ADIS16477-2BMLZ
2023-03-29 22:38:30
ADIS16505-2BMLZ
2023-03-29 21:55:00
ADIS16507-3BMLZ
2023-03-29 21:45:10
ADIS16475-3BMLZ
2023-03-29 18:00:02
ADIS16495-3BMLZ
2023-03-29 17:31:43
IMU ACCEL/GYRO/MAG SPI 24ML
2023-03-28 19:37:16
IMU ACCEL/GYRO/MAG SPI 24ML
2023-03-28 19:37:12
ADIS16495-1BMLZ
2023-03-28 18:12:06
ADIS16465-2BMLZ
2023-03-28 14:29:28
ADIS16475-3/PCBZ
2023-03-28 14:28:52
ADIS16470/PCBZ
2023-03-28 13:25:12
ADIS16470AMLZ
2023-03-28 13:23:10
ADIS16475-1BMLZ
2023-03-28 13:22:48
ADIS16467-1BMLZ
2023-03-28 13:11:19
ADIS16467-2BMLZ
2023-03-28 13:11:19
 電子發燒友App
電子發燒友App









 工商網監
工商網監
評論