 基于LeGo-LOAM框架的3D激光SLAM技術
基于LeGo-LOAM框架的3D激光SLAM技術
激光SLAM很多人都覺得很難,對于初學者更是不知道從哪里開始學起,怎樣才能更高效的學習,進入相關企業需要達到什么樣的要求,這也是很多初學者面臨的難題。如果掌握了3D激光SLAM的核心技術原理,編程能力也過硬,一般企業年薪至少30W起步了。
學習SLAM主要需要攻克三大難關:
扎實的數學基礎
對整個SLAM大框架及細節部分理解到一定深度
比較高度的編程能力
這三點都絕非易事,需要花很大的功夫,中間也有不少彎路要走。
對于初學者,推薦以下的學習路線:
先看一遍十四講入個門,不用看的太深入,應為這會可能會有很多不明白的地方。
查閱相關的碩博論文、綜述論文,看看前人的工作部分,再找經典的開源代碼過一遍。
學習框架:LeGo-LOAM 、LOAM/A-LOAM、Lio-Sam、cartographer等。
可以嘗試做一些實際項目,邊做邊總結。
做好以上幾點基本都差不多了,但是自己學習總是會遇到很多困難。為此,我們與高級科學家弘毅學者一起研發了《深度剖析面向機器人領域的3D激光SLAM技術原理、代碼與實戰》課程,一方面是帶領大家入門基于LeGo-LOAM框架的3D激光SLAM技術,另一方面是帶領大家掌握激光SLAM的學習方法。
相對于LOAM算法,LeGo-LAOM能夠進行地面優化,同時保證了輕量級;也使用了Keyframe概念以及回環檢測位姿圖優化的方式對后端進行重構。
對于工業領域而言,LeGo-LOAM有非常廣泛的應用,尤其是工業機器人領域,LeGo-LOAM一直都是應聘者必須掌握的框架。
對于學術研究而言,LeGo-LOAM是激光SLAM的經典框架,LeGo-LOAM源碼簡潔清晰,比LOAM算法的代碼可讀性要高很多。近幾年各頂會上的很多SLAM算法設計思想都潛移默化地受LeGo-LOAM的影響,對其的改進思路相較于LOAM也比較多樣化。
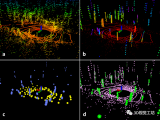
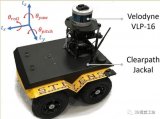
學好LeGo-LOAM,不管是初學激光SLAM還是進階,都是有意義的。 本課程從必備的數學知識,到算法框架、源碼,再到最后的實踐,力求銜接清晰,通俗易懂,便于大家消化吸收。 LeGo-LOAM地面優化 LeGO-LOAM運行效果展示: 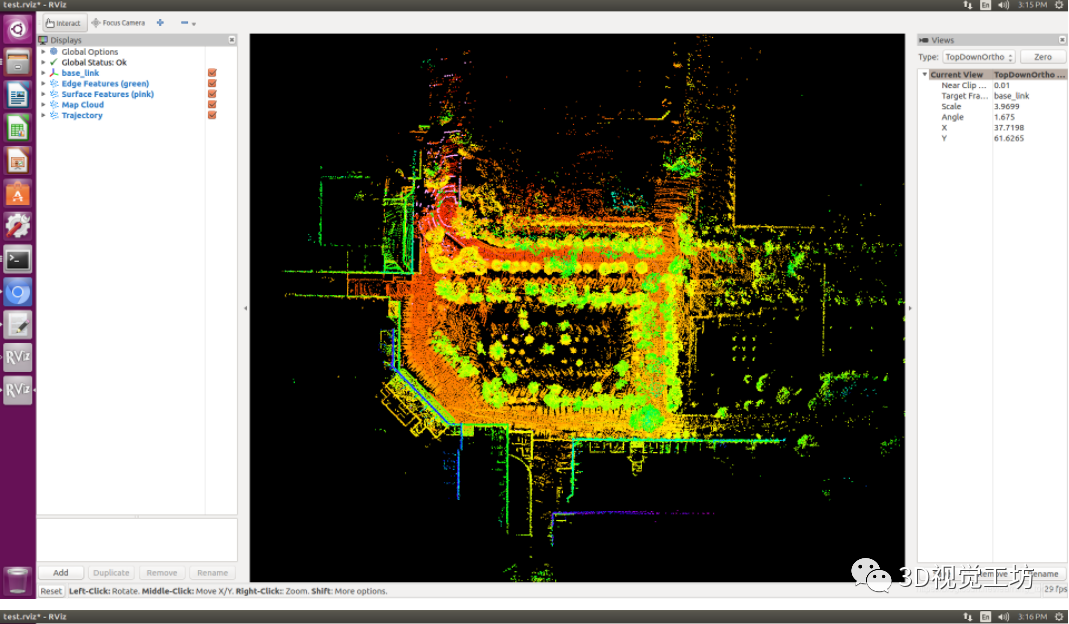
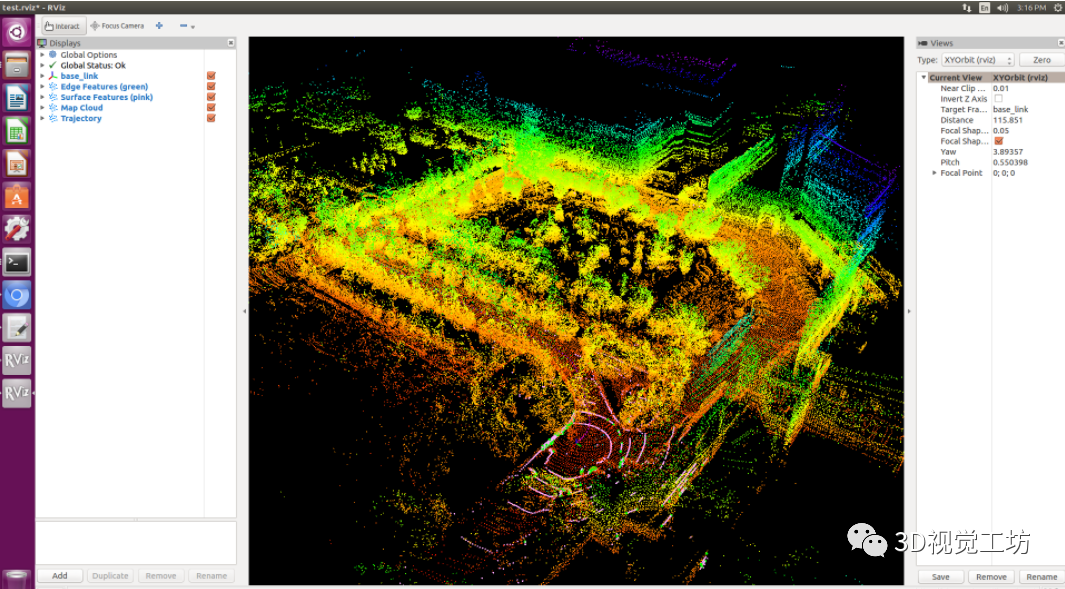
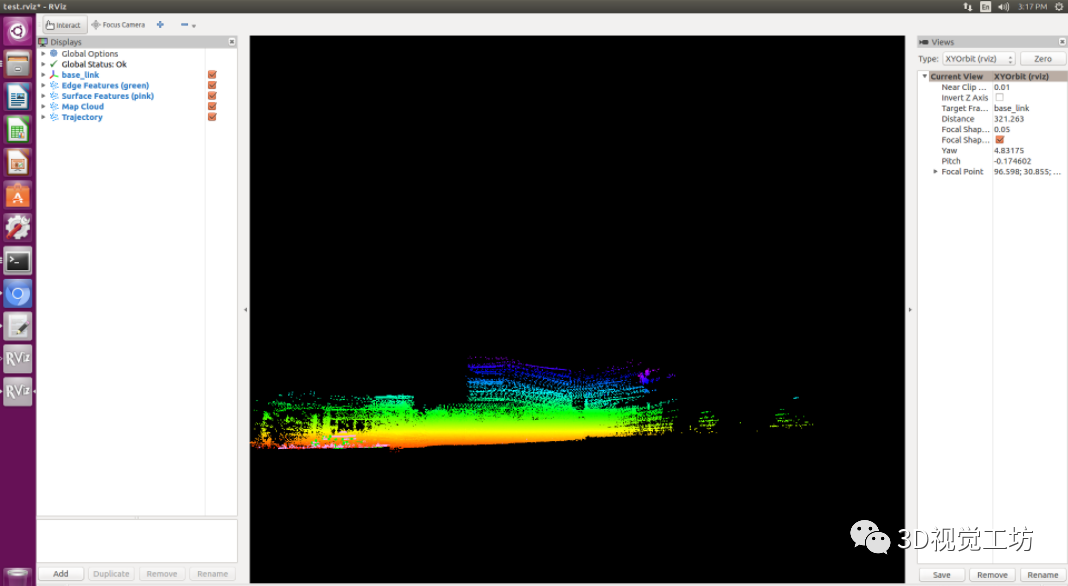 <<< 左右滑動見更多 >>>
<<< 左右滑動見更多 >>>
課程特色
這門課程的推出,一方面是帶領大家入門基于LeGo-LOAM框架的3D激光SLAM技術,另一方面是教大家高效的SLAM學習方法。在這門課程中,我們首先會講述LeGo-LOAM的整體框架,再逐句精講LeGo-LOAM的源碼,真正做到徹底搞懂;另外會把筆者多年總結的激光SLAM常見的面試題、面試技巧分享給大家;也會和大家交流自己的學習過程、經驗、以及對SLAM的理解。認真學完本次課程,基本上可以達到企業對于激光SLAM從業者的要求,拿到offer不成問題。
-
激光
+關注
關注
20文章
3418瀏覽量
65779 -
3D
+關注
關注
9文章
2950瀏覽量
109425 -
slam技術
+關注
關注
0文章
13瀏覽量
1652
原文標題:深度剖析面向機器人領域的3D激光SLAM技術原理、代碼與實戰
文章出處:【微信號:3D視覺工坊,微信公眾號:3D視覺工坊】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
5 款激光雷達:iDAR、高清3D LiDARInnovizPro、S3、SLAM on Chip、VLS-128
3D激光雷達SLAM技術的應用趨勢
測試的SLAM方案
基于自動駕駛汽車記錄的3D激光掃描的SLAM閉環問題討論
用于3D激光雷達SLAM回環檢測的實時詞袋模型BoW3D
基于LeGo-LOAM框架的激光SLAM技術解析
聊聊3D激光SLAM開源算法-LeGo-LOAM
詳解激光SLAM框架LeGO-LOAM
3D激光SLAM是用LOAM還是LeGo-LOAM?

3D激光SLAM,為什么要選LeGo-LOAM?

不同3D激光SLAM方案對比分析
對于3D激光SLAM,LeGo-LOAM到底有多重要?

中強光智能3D激光SLAM無人叉車技術特點詳解
什么是激光雷達3D SLAM技術?

基于深度學習的LiDAR SLAM框架(DeepPointMap)






 工商網監
工商網監
評論