 高性能六軸IMU,讓姿態控制更精準
高性能六軸IMU,讓姿態控制更精準
IMU能夠測量載體的角速度和加速度,為載體提供關鍵數據。幫助實現姿態控制、導航、運動軌跡測量等多個功能。
我們有一款[六軸IMU] ER-MIMU-08內置陀螺儀與加速度計,在擁有高性能的同時對尺寸進行極致控制。非常適合無人機、機器人、機器狗以及機械臂。
極致尺寸
體積只有38.6x 44.8 x25.5mm,重量≤70g,緊湊、小型的設計,可以很方便地安裝在載體上。
使用RS422總線通訊,波特率在230400 921600可設,工作溫度為-40 +80℃滿足大多數設備使用。
高性能傳感器
陀螺儀測量范圍為±400o/s,偏置不穩定性為1o/h,偏置穩定性為5o/h ;
加速度計測量范圍為±30g,偏置穩定性<50ug,偏置重復性為100ug;
陀螺儀與加速度計提供角速度和加速度,這些數據通過計算可獲得載體姿態、速度、位移等信息。
姿態控制
IMU提供的數據經解算后得出的姿態信息幫助載體進行平衡和穩定行走/飛行控制。還支持檢測、響應外部沖擊和干擾,特別是在不平坦或動態變化的環境中,這一功能顯得尤為重要。
在人形機器人中,IMU數據被用于檢測各個狀態的角度偏移和平衡,特別是在機器人的軀干、關節、手部等部位。
定位導航
在執行復雜任務時,精確的定位和導航至關重要。[慣性測量單元]可以結合GPS等外部定位信息,通過算法融合實現更為準確、可靠的自主導航。使其能夠自主執行復雜任務并與周圍環境有效互動。
運動軌跡測量與跟蹤
IMU 可以對載體的軌跡進行測量和跟蹤,確保載體能夠按照預定的軌跡行動,并在必要時進行調整以達成任務目標,實現精確的路徑規劃和軌跡控制。
審核編輯 黃宇
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
IMU
+關注
關注
6文章
340瀏覽量
46472 -
姿態控制
+關注
關注
0文章
10瀏覽量
7749
發布評論請先 登錄
相關推薦
熱點推薦
革新無人機導航:如何重新定義IMU高性能低成本
隨著無人機在農業測繪、物流運輸、應急救援等領域的廣泛應用,市場對高精度、高可靠性導航系統的需求激增。每一次精準的姿態調整與運動響應,都離不開IMU。ER-MIMU-08 應運而生——成為無人機導航與
海凌科發布HLK-AS2001十軸姿態傳感器模塊
。 HLK-AS2001作為一款高性能的十軸姿態傳感器模塊,其內部集成了高精度的加速度計、陀螺儀和磁力計,能夠全面感知物體的運動狀態。通過采用高性能微處理器和先進的濾波算法,該模塊能夠
ICM-42670-P中文數據手冊和開發套件:高性能 6 軸 Motion跟蹤? IMU
ICM-42670-P 高性能 6 軸 Motion跟蹤? IMU *附件:ICM-42670-P 數據手冊 替代MPU6050.pdf *附件:IMU PCB 設計和 MEMS 組裝
IMU加持:無人機&機器人再啟新章!
無人機與機器人技術的快速發展,對核心組件的性能提出了更高要求。ER-MIMU-07,作為全球最小的六軸MEMS IMU,以其卓越的性能為無人
探索未知,IMU助力精準導航
隨著科技的持續進步,高性能MEMS IMU成為導航技術領域的關鍵組件。其中,ER-MIMU-02Mini能實時提供物體的加速度與角速度數據,這些數據通過計算可獲得載體的姿態、速度、位移等信息,滿足多種高精度測量需求。
從姿態到飛行控制,IMU全方位守護無人機飛行
IMU為無人機提供關鍵飛行數據,可以幫助無人機實現姿態控制、導航、飛行控制等多個功能。提供的數據被飛控系統用于生成控制指令,在飛行中做出快速

嵌入式學習-飛凌嵌入式ElfBoard ELF 1板卡-運動追蹤之六軸傳感器使用場景
六軸傳感器主要適用于需要測量和監控物體在三維空間中的運動、速度、方向和姿態的場景。應用場景非常廣泛,涵蓋了許多不同的領域和行業。具體的應用包括但不限于:1.機器人控制:
發表于 12-02 09:47
飛凌嵌入式ElfBoard ELF 1板卡-運動追蹤之六軸傳感器使用場景
六軸傳感器主要適用于需要測量和監控物體在三維空間中的運動、速度、方向和姿態的場景。應用場景非常廣泛,涵蓋了許多不同的領域和行業。具體的應用包括但不限于:1.機器人控制:
發表于 11-29 08:57
愛普生M-G365PDC1/M-G365PDF1六軸陀螺儀
在快速發展的工業自動化、無人機導航、自動駕駛及精密機械控制等領域,高性能的慣性測量單元(IMU)扮演著至關重要的角色。作為新一代技術IMU標準:愛普生M-G365PDC1/M-G365

《DNK210使用指南 -CanMV版 V1.0》第二十三章 六軸傳感器——姿態解算實驗
第二十三章 六軸傳感器——姿態解算實驗 在上一章節中,介紹了板載六軸傳感器的使用,僅需簡單的使用提供的驅動,便可從
發表于 10-18 14:10

愛普生開發用于姿態和振動控制的理想IMU
-M-G370PDS0改善了短期噪音,擴大了型號陣容,并提供了更廣泛的產品選擇-精工愛普生公司(“愛普生”,TSE:6724)已經開發并正在運送M-G370PDS0的樣品,這是一種配備高性能六軸
發表于 08-12 11:15
?0次下載
意法半導體新款MEMS IMU LSM6DSV32X實現精確姿態識別應用
憑借3核、6軸傳感架構,意法半導體新款MEMS IMU LSM6DSV32X能夠進行卓越的邊緣計算處理,是智能手機的高精度感測和3D地圖、筆記本電腦和平板電腦的情境感知、AR和VR的精確姿態識別,以及可穿戴設備的全天候跟蹤等應用
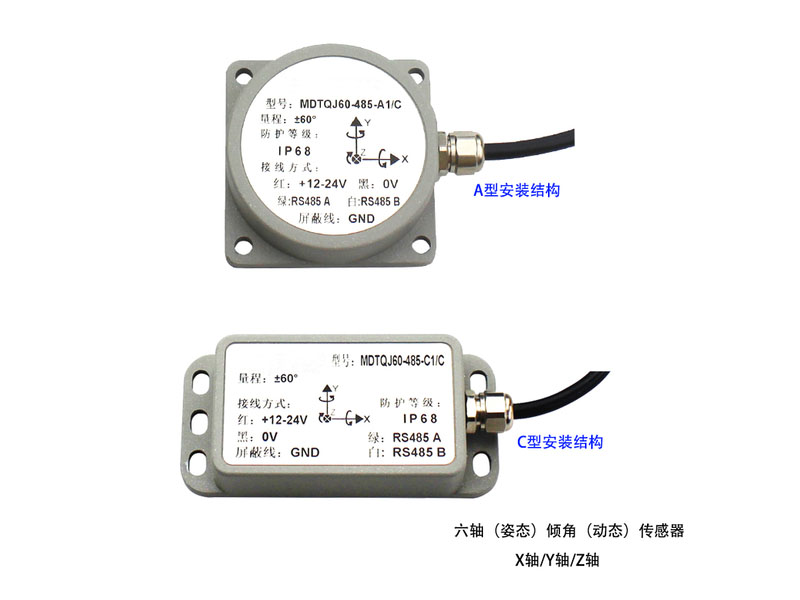
六軸姿態傾角動態傳感器
六軸(姿態)傾角(動態)傳感器內部使用數字型MEMS動態芯片,可測量運動載體的姿態參數(橫滾、俯仰以及方位角),適用于運動或振動狀態下的傾角測量。產品內置加速度和陀螺傳感器,集成了卡爾





 工商網監
工商網監
評論