 電子發(fā)燒友App
電子發(fā)燒友App


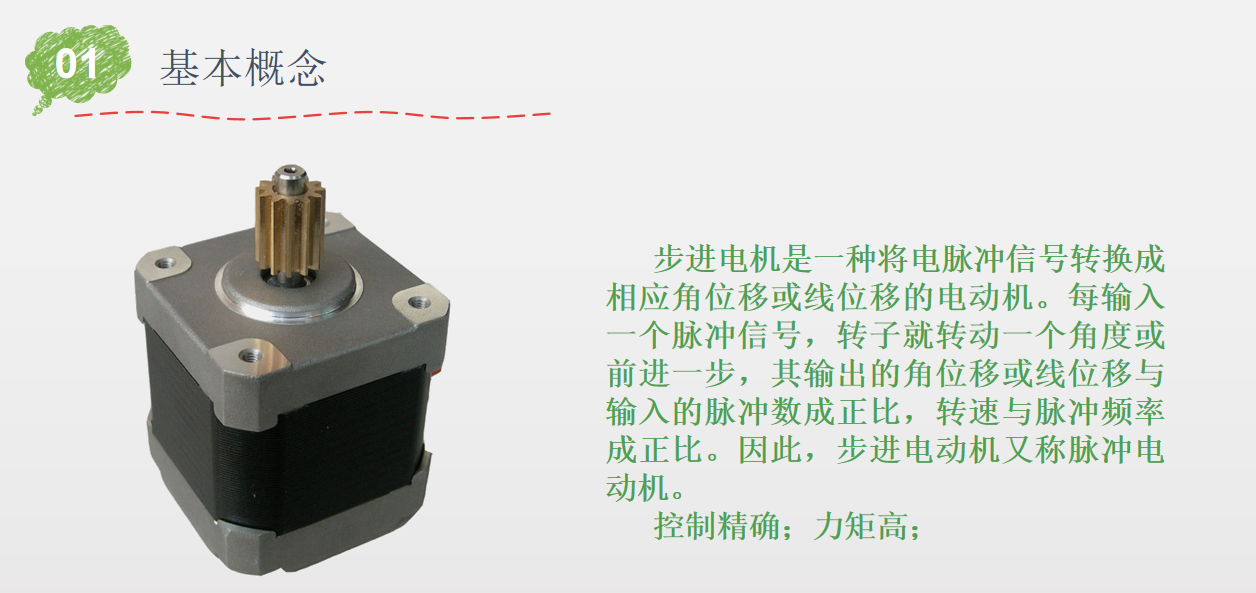
步進(jìn)電機(jī)是令人印象深刻的小型引擎,可能沒有得到應(yīng)有的贊譽(yù),因?yàn)樗鼈兪俏覀?a target="_blank">電子生活中相對重要的一部分。打印機(jī)和數(shù)控機(jī)床是我們認(rèn)為理所當(dāng)然的大批量生產(chǎn)產(chǎn)品,它們使用步進(jìn)電機(jī)來完成我們的工作。絕大多數(shù)公眾甚至可能不知道它們的存在;因此,我們將簡要介紹一下步進(jìn)電機(jī)的類型、它們的工作原理以及我們使用它們的原因。?? ??
它們是如何工作的?????
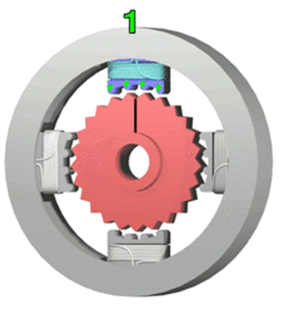
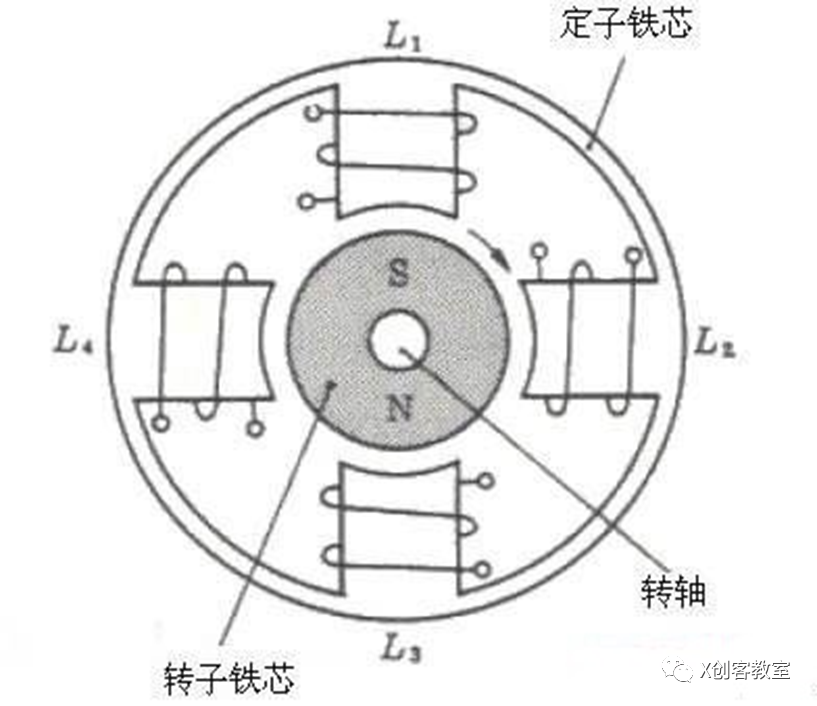
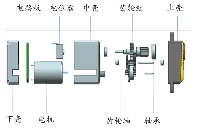
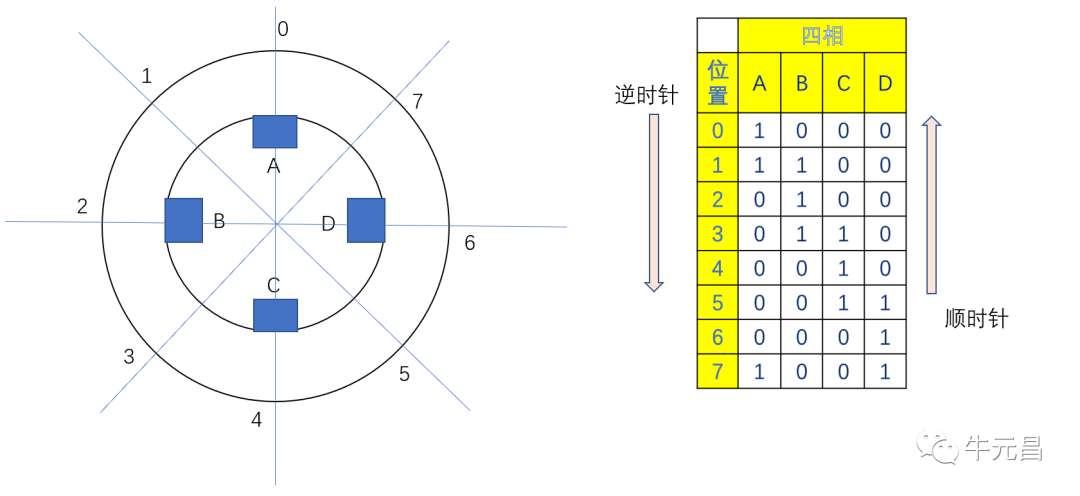
步進(jìn)電機(jī)是直流充電線圈,以圓形排列成所謂的“陣列”。當(dāng)陣列中的每個“相”或線圈通電時,它就會旋轉(zhuǎn)電機(jī)。每一個小旋轉(zhuǎn)被稱為一個步進(jìn),這是步進(jìn)電機(jī)名稱的來源,并且每個都有自己的特點(diǎn),例如大小和相數(shù)。?
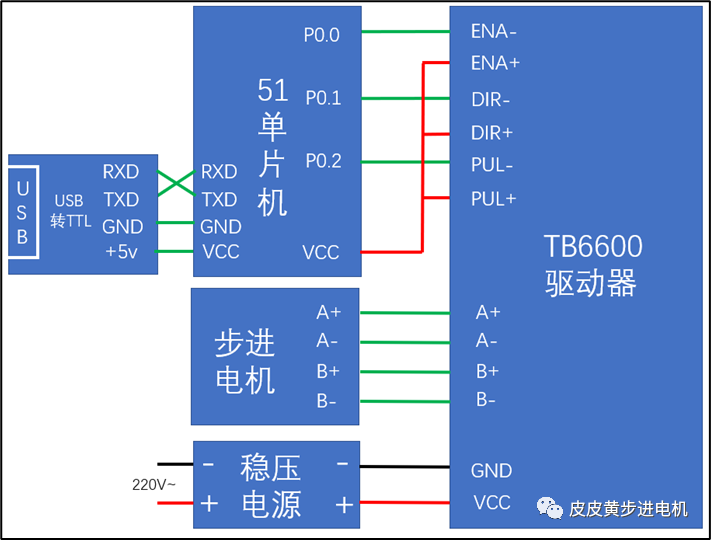
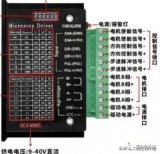
控制這些迷人的小機(jī)器比普通的直流電機(jī)要復(fù)雜一些。由于每種設(shè)計(jì)都針對其分配的任務(wù)進(jìn)行了獨(dú)特的調(diào)整,因此有一些同樣獨(dú)特的電子設(shè)備可以控制它們。?
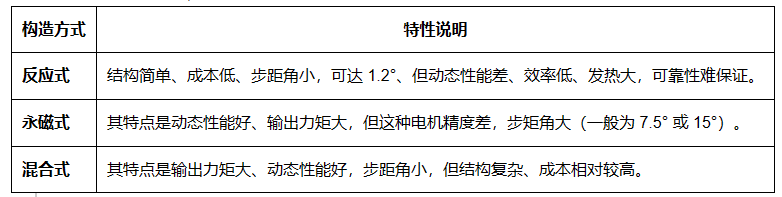
有哪些類型??
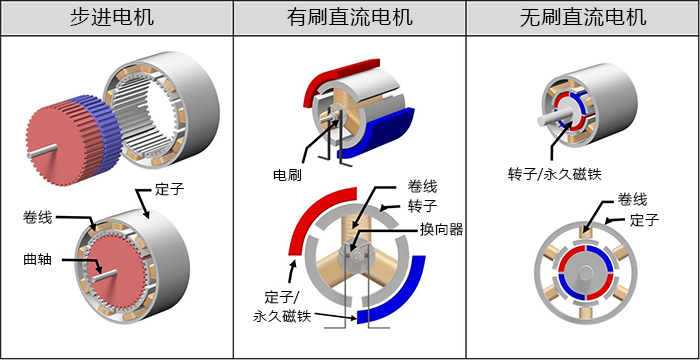
目前采用三種不同類型的步進(jìn)電機(jī):單極、雙極和可變磁阻。由于最受歡迎的兩種是單極和雙極,我們將把大部分注意力轉(zhuǎn)向這些類型。?
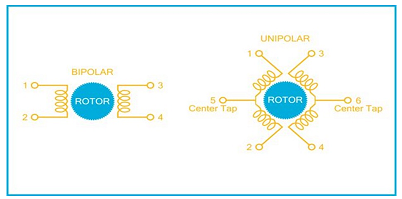
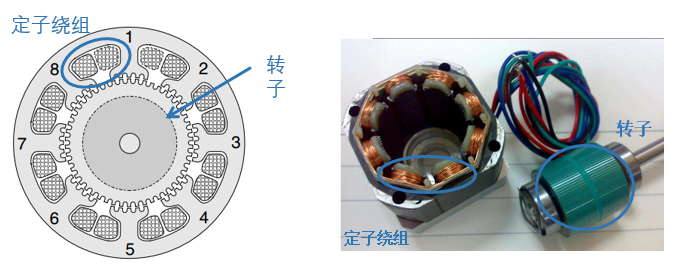
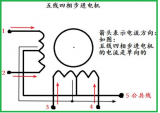
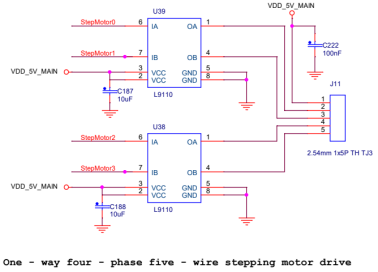
單極步進(jìn)電機(jī)的特點(diǎn)是每相一個線圈和五到八根導(dǎo)線。當(dāng)這些電線連接到晶體管時,它們允許線圈以特定順序觸發(fā)。電機(jī)轉(zhuǎn)動的方向取決于線圈的觸發(fā)順序。這種設(shè)計(jì)的缺點(diǎn)是一次只能充電一個線圈,因此導(dǎo)致扭矩保持能力有限。 ?
雙極步進(jìn)電機(jī)通常只有四根導(dǎo)線從其底座伸出,但由于每相只有一個線圈被激活,因此需要反轉(zhuǎn)電流以步進(jìn)電機(jī)。由于需要反向電流,我們不能使用傳統(tǒng)的晶體管來控制相位。為了控制線圈,您將需要一個H橋電路,該電路允許在任一方向上跨負(fù)載施加電壓。這種設(shè)計(jì)的一個優(yōu)點(diǎn)是,與同樣大小的單極電機(jī)相比,它更堅(jiān)固。
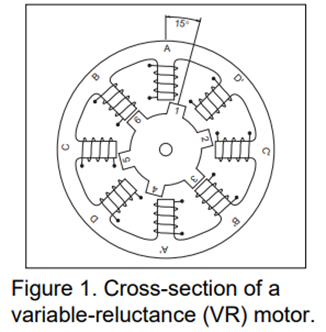
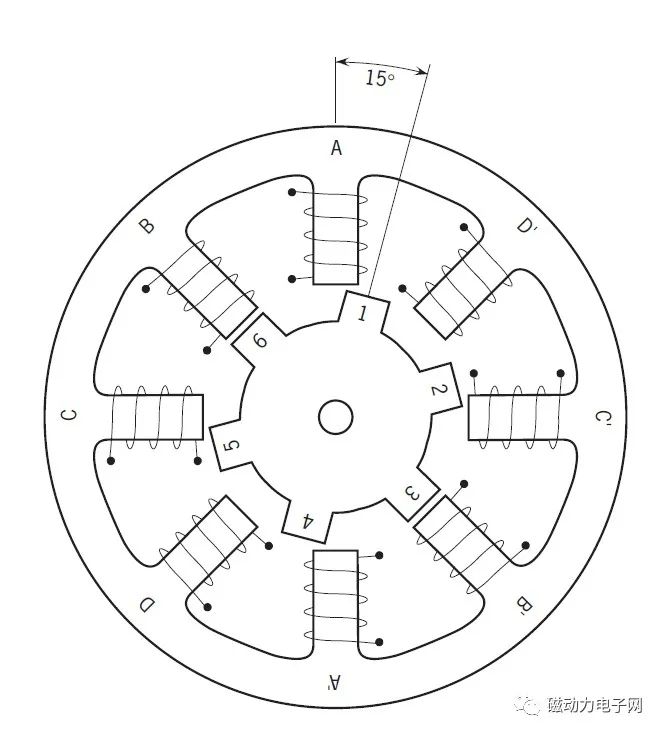
可變磁阻電機(jī)的核心是一個非磁性轉(zhuǎn)子,如果增加更多的齒,可以實(shí)現(xiàn)更高的分辨率。繞組通電順序也與永磁電機(jī)相反。每個“階梯”角度也是正常角度的一半。
我們?yōu)槭裁匆褂盟鼈儯?/p>
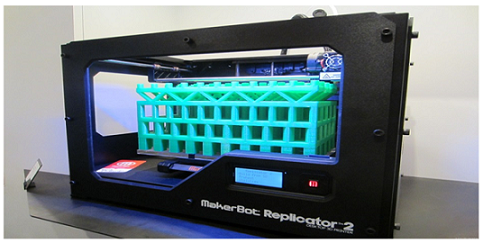
步進(jìn)電機(jī)在設(shè)計(jì)上比標(biāo)準(zhǔn)直流電機(jī)表現(xiàn)出更大的轉(zhuǎn)矩和精度。如上所述,彩色打印機(jī)是步進(jìn)電機(jī)使用的一個很好的例子,它能夠使卷紙與油墨機(jī)構(gòu)保持同步。這些設(shè)備還為數(shù)控機(jī)床和3D打印機(jī)提供了幾乎無限可控的精度。
缺點(diǎn)
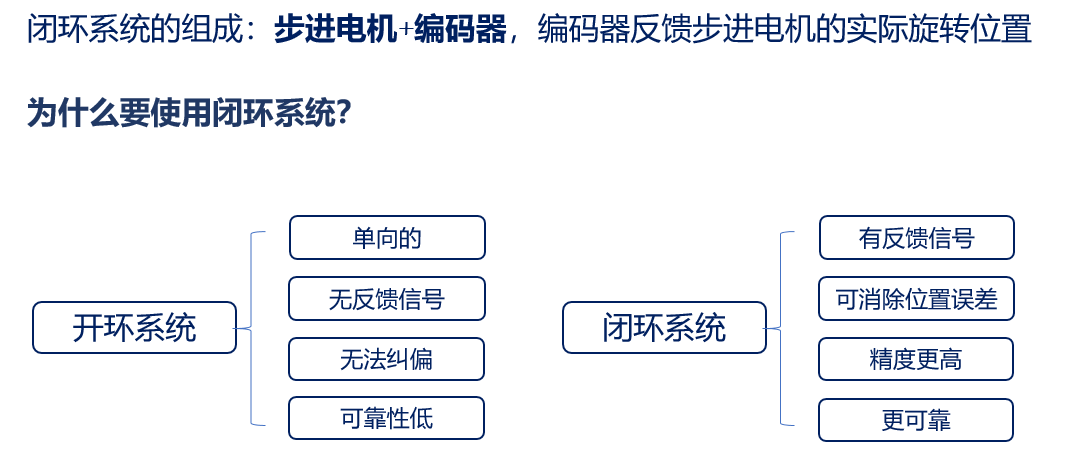
與大多數(shù)創(chuàng)新一樣,步進(jìn)電機(jī)也有其局限性,其中之一是其高速轉(zhuǎn)矩能力。這些電機(jī)效率不高,在實(shí)際不工作的情況下會消耗最多的負(fù)載,而且往往運(yùn)行有點(diǎn)熱。步進(jìn)電機(jī)還缺少與位置相關(guān)的反饋,運(yùn)行所謂的“開環(huán)”可能有助于解決這個問題。
下次你在工作中打印東西或在3D打印機(jī)上創(chuàng)建那個瘋狂的玩具時,你會對他們的工作方式有新的欣賞。
審核編輯 黃昊宇





















 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論