 舵機對比伺服電機,步進電機有哪些優點?
舵機對比伺服電機,步進電機有哪些優點?
在講這個問題之前,先簡單介紹一下舵機、伺服電機、步進電機是什么以及它們的優缺點。
伺服電機是一個電機系統,它包含電機、傳感器和控制器。直流無刷電機可以是伺服電機里面的一部分,交流電機也可以是,但他們并不是伺服電機。僅僅一臺電機都不能算是伺服電機,因為他們并不具備伺服電機的功能。因此常常體積較大,主要用于比較精準的位置、速度或力矩輸出。
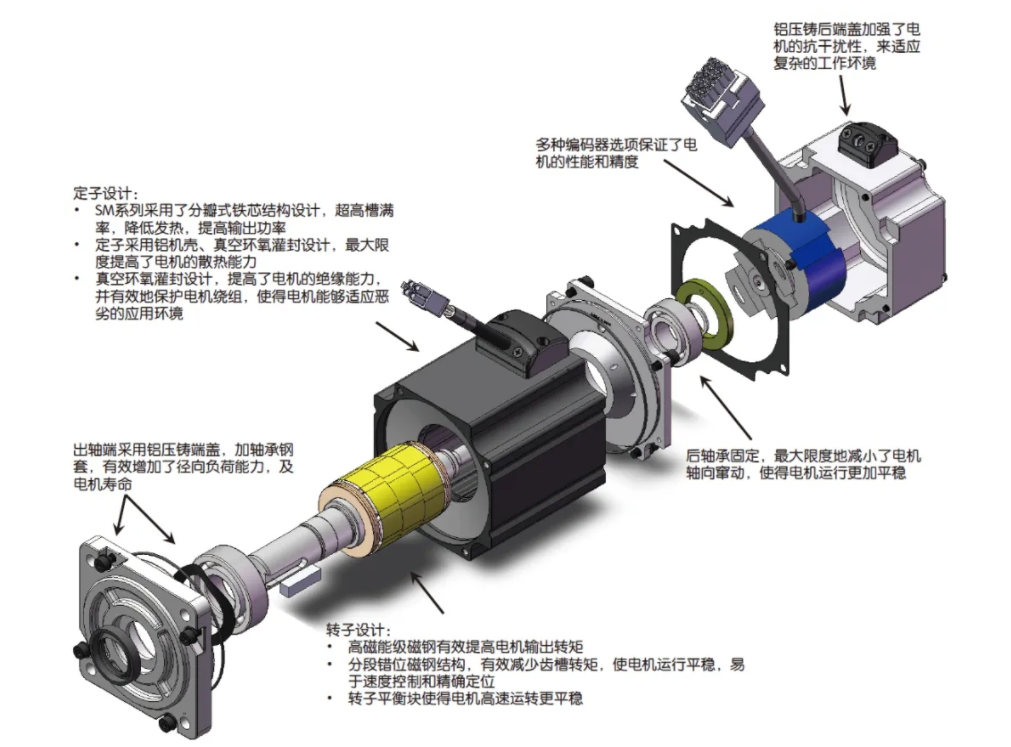
伺服電機結構圖
步進電機英文是stepper/step/stepping motor。主要是依靠定子線圈序列通電,順次在不同的角度形成磁場,推拉定子旋轉。步進電機的好處是,你可以省掉用于測量電機轉角的傳感器。因此在結構上和價格上有一定的優勢。而且它的位置和速度控制相對簡單。其缺點是,第一,與同等功率的電機相比載荷比較小,沒有角度傳感器的情況下不能輸出大力矩。第二,功耗相對較大,要么全開,要么全關。所以要么接近滿功耗,要么就不能出力。
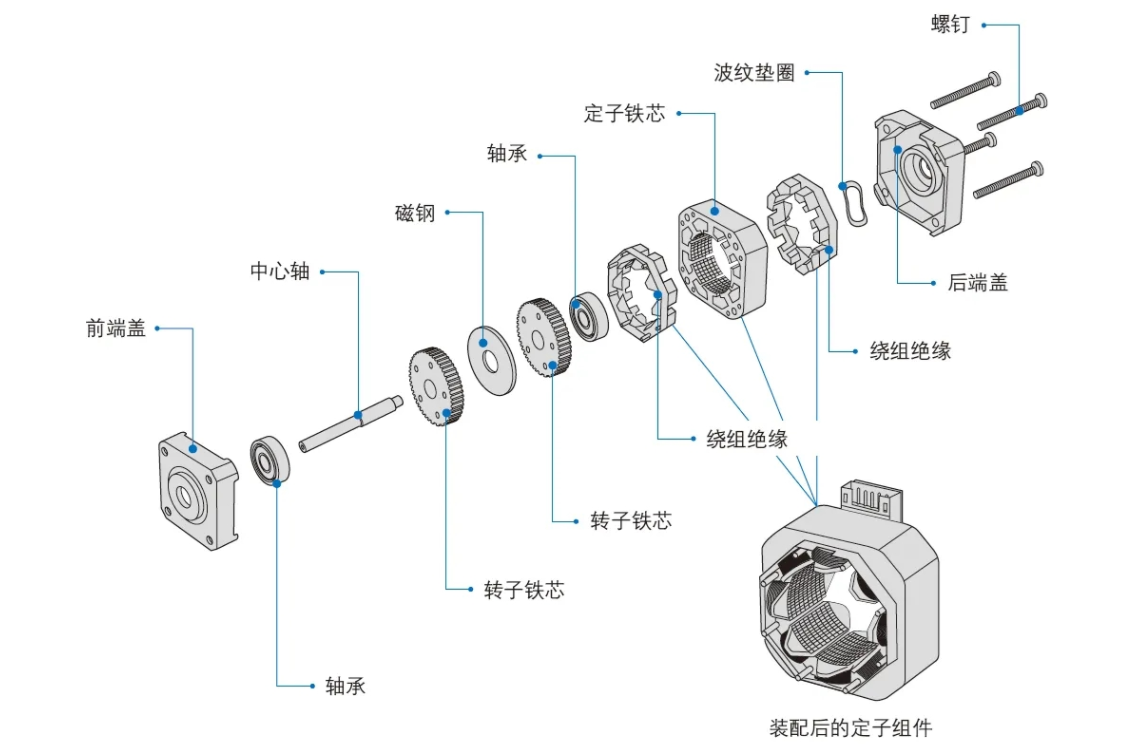
步進電機機構圖
舵機是什么呢?舵機是個俗稱,是玩航模、船模的人起的,因為它常用于舵面操控,其實就是一個簡易的伺服電機系統,同時也是最常見的伺服電機系統,英文叫做Servo,就是Servomotor的簡稱。
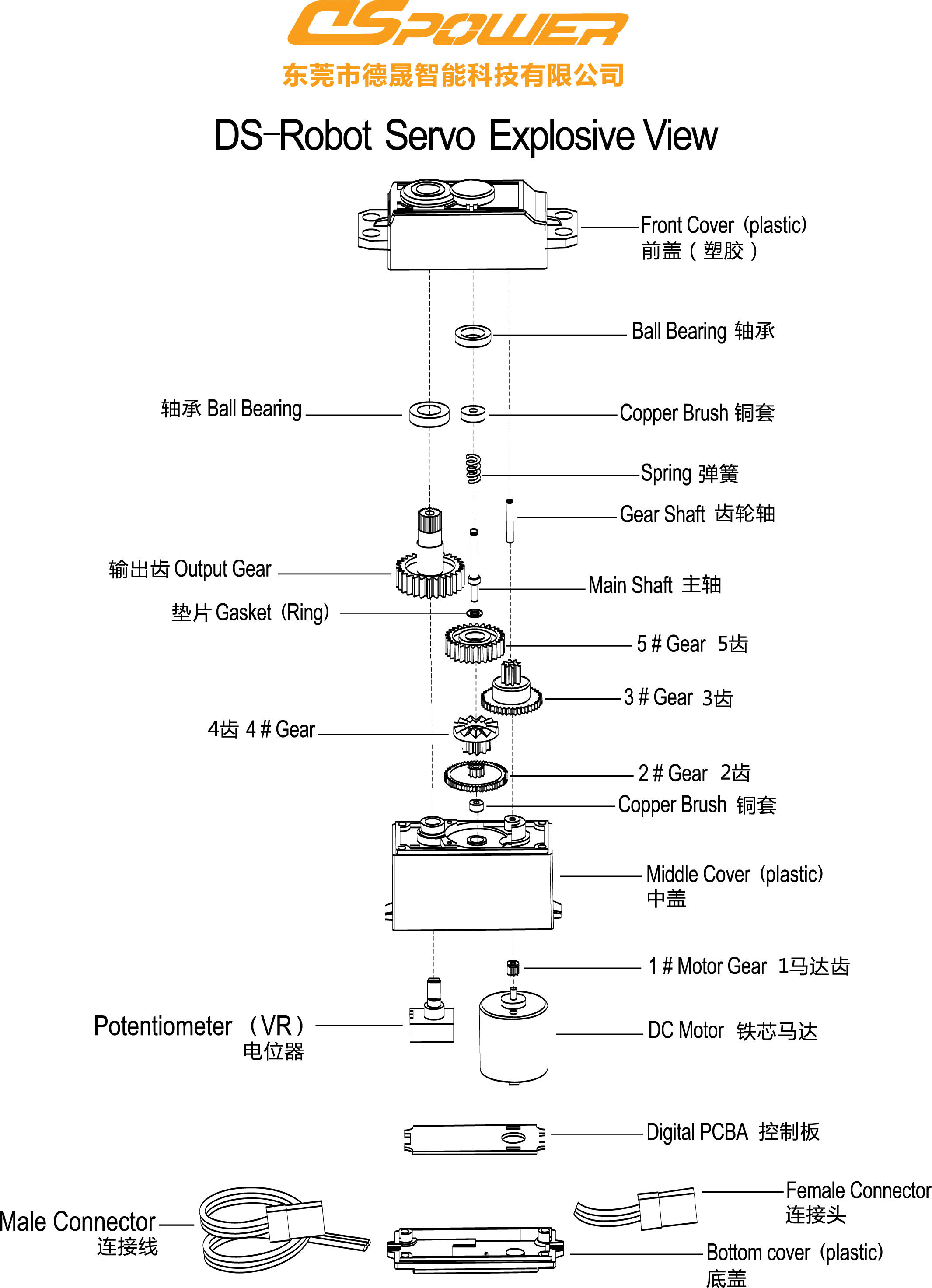
舵機結構圖
以前的舵機就只是將PWM信號與滑動變阻器的電壓相比對,通過硬件電路實現固定控制增益的位置控制。但經過多年的發展,舵機的技術性正在不斷的提高。現在的舵機舵機不再只是通過簡單的硬件電路實現固定控制增益的位置控制,而是可以采用更復雜的控制策略和算法來實現更高級別的控制。例如,可以采用先進的控制算法如PID控制器、模糊邏輯控制器等來實現舵機的精確位置控制和速度控制,以滿足不斷變化的應用需求。
此外,隨著舵機技術的不斷發展,也出現了多種舵機接口協議和通信方式,如RS485、CAN、UART等,這些接口協議和通信方式可以支持舵機之間的雙向通信和數據交換,以實現更高級別的控制策略和更復雜的系統應用。
另外,還可以將舵機與傳感器、執行器等其他設備進行組合應用,以實現更復雜的系統功能。例如,在機器人領域中,可以通過舵機控制機器人的關節運動,并使用傳感器反饋機器人的位姿信息,以實現機器人的自主運動和智能控制。
也就是說,它本身就是一個完整的伺服電機系統,相對于伺服電機來說,成本更低,同扭矩下體積也更小,雖然精度沒那么高,但操作更加簡單。
而相對于步進電機呢,有以下三個優點:
1、控制精度:步進電機通過控制脈沖數量進行定位,而舵機則是根據設定的控制信號,按照設定的要求運行,可以實現精確的運動控制。
2、應用領域:步進電機多用于簡單的位移控制,而舵機則更多應用在航模等需要進行高精度姿態控制的領域。
3、負載能力:與步進電機相比,舵機的負載能力更強,能夠承受更大的外部阻力。
總的來說,與伺服電機相比,舵機是一個完整的伺服電機系統,但體積更小,成本更低,操作起來也更加簡單。這使得舵機在許多應用場景中成為伺服電機的優秀替代品,例如在無人機、模型制作等領域。雖然舵機的精度可能不如伺服電機,但它的體積小、重量輕、成本低以及操作簡單的特點使得它在許多應用場景中表現出色。而和步進電機相比,舵機的控制精度和負載能力都相對更加優秀,應用的范圍也更廣。
-
電機
+關注
關注
143文章
9248瀏覽量
148327 -
步進電機
+關注
關注
152文章
3156瀏覽量
149122 -
伺服電機
+關注
關注
87文章
2100瀏覽量
59138 -
舵機控制
+關注
關注
3文章
46瀏覽量
22640 -
伺服舵機
+關注
關注
0文章
16瀏覽量
5198
發布評論請先 登錄
舵機與伺服電機有的區別








 工商網監
工商網監
評論