") arduino控制步進電機代碼
arduino控制步進電機代碼
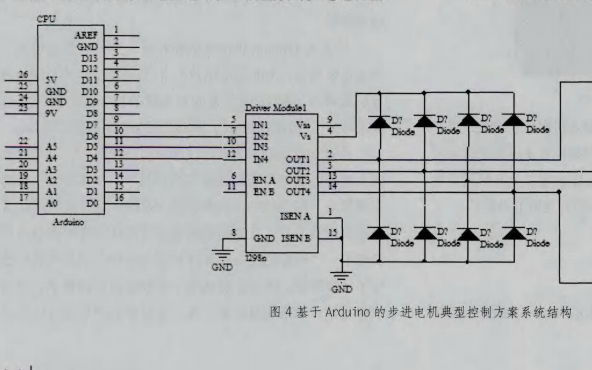
Arduino是一種開放源代碼的電路板平臺,它可以用于控制各種不同的電子設(shè)備,包括步進電機。步進電機是一種電動機,可以通過下達特定的指令來控制每個步進的角度,從而使電機旋轉(zhuǎn)到指定的位置。在本文中,我們將詳細介紹如何使用Arduino來控制步進電機的代碼。
步進電機通常用于需要精確控制角度和位置的應用中,例如3D打印機、數(shù)控銑床和機器人等。通過使用Arduino來控制步進電機,我們可以輕松實現(xiàn)自動化系統(tǒng),提高生產(chǎn)效率和準確性。
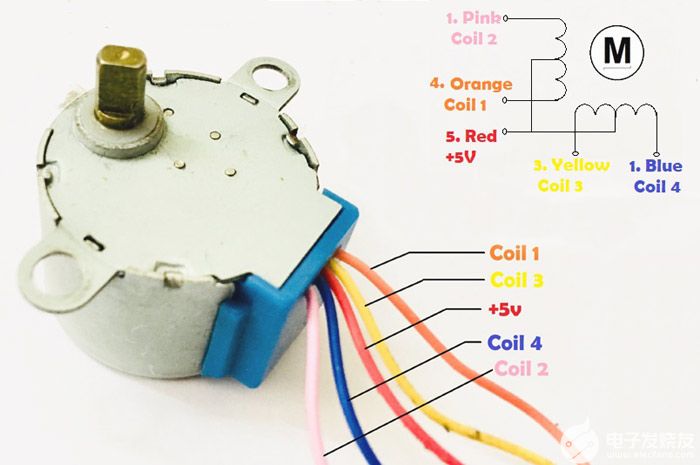
要控制步進電機,我們首先需要了解步進電機的原理。步進電機是由一系列電磁線圈組成的,通過交替激活不同的線圈,可以使電機旋轉(zhuǎn)到特定的角度。控制步進電機的關(guān)鍵是確定正確的電磁線圈激活順序和時間間隔。Arduino可以通過改變輸出引腳的電平來控制電機的旋轉(zhuǎn)方向和速度。
以下是一個簡單的Arduino程序,用于控制一個4線2相步進電機:
// 定義步進電機驅(qū)動引腳
const int stepPin = 3;
const int dirPin = 4;
// 定義步進電機轉(zhuǎn)動參數(shù)
const float stepsPerRevolution = 200; // 步進電機每轉(zhuǎn)一圈需要的步數(shù)
const float stepAngle = 360 / stepsPerRevolution; // 每步轉(zhuǎn)動的角度
void setup() {
// 設(shè)置步進電機驅(qū)動引腳為輸出模式
pinMode(stepPin, OUTPUT);
pinMode(dirPin, OUTPUT);
}
void loop() {
// 將步進電機順時針轉(zhuǎn)2圈
rotate(2 * stepsPerRevolution, true);
// 等待2秒
delay(2000);
// 將步進電機逆時針轉(zhuǎn)1圈
rotate(stepsPerRevolution, false);
// 等待2秒
delay(2000);
}
// 控制步進電機轉(zhuǎn)動函數(shù)
void rotate(float steps, bool clockwise) {
// 設(shè)置轉(zhuǎn)動方向
digitalWrite(dirPin, clockwise ? HIGH : LOW);
// 逐步控制步進電機轉(zhuǎn)動
for (int i = 0; i < steps; i++) {
digitalWrite(stepPin, HIGH);
delayMicroseconds(1000); // 控制步進電機轉(zhuǎn)動速度
digitalWrite(stepPin, LOW);
delayMicroseconds(1000);
}
}
在上面的代碼中,我們首先定義了步進電機的驅(qū)動引腳。我們使用數(shù)字引腳3和4分別連接步進電機的步進和方向輸入。然后,在setup()函數(shù)中設(shè)置這些引腳為輸出模式。
在loop()函數(shù)中,我們通過調(diào)用rotate()函數(shù)來控制步進電機的轉(zhuǎn)動。我們首先將電機順時針轉(zhuǎn)動2圈,然后等待2秒,然后將電機逆時針轉(zhuǎn)動1圈,再次等待2秒。這個過程將一直重復下去。
在rotate()函數(shù)中,我們首先根據(jù)clockwise參數(shù)設(shè)置步進電機的轉(zhuǎn)動方向,如果參數(shù)為true,則設(shè)置為順時針轉(zhuǎn)動,否則設(shè)置為逆時針轉(zhuǎn)動。然后,在一個循環(huán)中,我們通過改變步進電機驅(qū)動引腳的電平來控制步進電機的轉(zhuǎn)動。我們首先將步進電機引腳設(shè)置為高電平,延遲一定時間(這里設(shè)置為1000微秒)來控制轉(zhuǎn)動速度,然后將引腳設(shè)置為低電平,再次延遲相同的時間。這個循環(huán)將重復執(zhí)行指定的步數(shù)。
通過以上的代碼,我們可以實現(xiàn)簡單的步進電機控制。然而,實際應用中可能需要更復雜的控制方式,例如根據(jù)傳感器數(shù)據(jù)或用戶輸入來調(diào)整轉(zhuǎn)動角度和速度。此外,還可以使用外部模塊或擴展板來擴展Arduino的功能,例如使用步進電機驅(qū)動器模塊來驅(qū)動更大功率的步進電機。這些都可以通過一些修改來實現(xiàn)。
總結(jié)起來,本文介紹了如何使用Arduino來控制步進電機的代碼。通過理解步進電機的工作原理,我們可以通過控制電平來實現(xiàn)精確的旋轉(zhuǎn)角度和速度。通過修改代碼和使用外部模塊,我們可以實現(xiàn)更復雜的步進電機控制應用。
-
電路板
+關(guān)注
關(guān)注
140文章
5086瀏覽量
101452 -
步進電機
+關(guān)注
關(guān)注
152文章
3155瀏覽量
149116 -
代碼
+關(guān)注
關(guān)注
30文章
4886瀏覽量
70240 -
Arduino
+關(guān)注
關(guān)注
188文章
6490瀏覽量
190074
發(fā)布評論請先 登錄
如何使用TB6600微步進驅(qū)動器和Arduino控制步進電機
如何使用Arduino Motor Shield Rev3控制步進電機
求分享使用esp8266和Arduino控制led或步進電機的代碼?
如何使用Arduino實現(xiàn)步進電機的分析與設(shè)計
arduino+A4889+步進電機

Arduino實驗16步進電機的控制
步進電機與Arduino使用教程
Arduino RTOS控制多個步進電機
使用電位器和Arduino實現(xiàn)步進電機控制
Arduino mega 2560控制42步進電機接線





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論