") 步進電機常見丟步原因分析及解決方法
步進電機常見丟步原因分析及解決方法
在一些自動控制領(lǐng)域中,步進電機的使用仍占著相當(dāng)大的比例,步進電機與驅(qū)動電路組成的開環(huán)數(shù)控系統(tǒng),因其簡單的結(jié)構(gòu)、低廉的價格和可靠的性能,目前已在很多行業(yè)中(工業(yè)自動化、醫(yī)療自動化、紡織自動化等)廣泛應(yīng)用。
步進電機經(jīng)常被用于精確定位的場合,因而保證電機不發(fā)生失步至關(guān)重要。
如果在調(diào)試過程中會發(fā)現(xiàn)步進電機丟步、堵轉(zhuǎn)和定位不準(zhǔn)現(xiàn)象,遇到這種情況不要著急,
更不要因此直接否定所選用步進電機,一定要冷靜觀察分析出現(xiàn)該現(xiàn)象的原因,由此找出解決之道!
步進電機的丟步及定位不準(zhǔn),一般由以下幾方面原因引起:
1、 改變方向時丟脈沖,表現(xiàn)為往任何一個方向都準(zhǔn),但一改變方向就累計偏差,并且次數(shù)越多偏得越多;
2、 啟動速度太高,加速度太大,引起丟步;
3、 在用同步帶的場合軟件補償太多或太少;
4、 步進電動機本身的工作轉(zhuǎn)矩不足,沒有足夠的能力來驅(qū)動負載;
5、 控制器受干擾引起誤動作;
6、 驅(qū)動器受干擾引起;
7、 軟件缺陷;
針對以上問題分析如下:
1)一般的步進驅(qū)動器對方向和脈沖信號都有一定的要求,如:方向信號在第一個脈沖上升沿或下降沿(不同的驅(qū)動器要求不一樣)到來前數(shù)微秒被確定,
否則會有一個脈沖所運轉(zhuǎn)的角度與實際需要的轉(zhuǎn)向相反,最后故障現(xiàn)象表現(xiàn)為越走越偏,細分越小越明顯,解決辦法主要用軟件改變發(fā)脈沖的邏輯或加延時。
2)由于步進電機特點決定初速度不能太高,尤其帶的負載慣量較大情況下,建議初速度在1r/s以下,
這樣沖擊較小,同樣加速度太大對系統(tǒng)沖擊也大,容易過沖,導(dǎo)致定位不準(zhǔn);電機正轉(zhuǎn)和反轉(zhuǎn)之間應(yīng)有一定的暫停時間,若沒有就會因反向加速度太大引起過沖。
3)根據(jù)實際情況調(diào)整被償參數(shù)值,(因為同步帶彈性形變較大,所以改變方向時需加一定的補償)。
4)適當(dāng)?shù)卦龃篑R達電流,提高驅(qū)動器電壓(注意選配驅(qū)動器、驅(qū)動芯片)選扭矩大一些的馬達。
5)系統(tǒng)的干擾引起控制器或驅(qū)動器的誤動作,我們只能想辦法找出干擾源,
降低其干擾能力(如屏蔽,加大間隔距離等),切斷傳播途徑,提高自身的抗干擾能力,
常見措施:
①用雙紋屏蔽線代替普通導(dǎo)線,系統(tǒng)中信號線與大電流或大電壓變化導(dǎo)線分開布線,降低電磁干擾能力。
②用電源濾波器把來自電網(wǎng)的干擾波濾掉,在條件許可下各大用電設(shè)備的輸入端加電源濾波器,降低系統(tǒng)內(nèi)各設(shè)備之間的干擾。
③設(shè)備之間最好用光電隔離器件進行信號傳送,在條件許可下,脈沖和方向信號最好用差分方式加光電隔離進行信號傳送。
在感性負載(如電磁繼電器、電磁閥)兩端加阻容吸收或快速泄放電路,感性負載在開頭瞬間能產(chǎn)生10~100倍的尖峰電壓,如果工作頻率在20KHZ以上。
6)軟件做一些容錯處理,把干擾帶來影響消除。
同時還可能是以下原因:
原因一:
轉(zhuǎn)子的加速度慢子步進電機的旋轉(zhuǎn)磁場,即低于換相速度時,步進電機會產(chǎn)生丟步。
這是因為輸入電機的電能不足,在步進電機中產(chǎn)生的同步力矩?zé)o法使轉(zhuǎn)子速度跟隨定子磁場的旋轉(zhuǎn)速度,從而引起丟步。
解決方法:
①使步進電機本身產(chǎn)生的電磁轉(zhuǎn)矩增大。因此可在額定電流范圍內(nèi)適當(dāng)加大驅(qū)動電流;或者在高頻范圍轉(zhuǎn)矩不足時,可適當(dāng)提高驅(qū)動電路的驅(qū)動電壓;也可以改用轉(zhuǎn)矩大的步進電機等。
②使步進電機需要克服的轉(zhuǎn)矩減小,因此可適當(dāng)降低電動機運行頻率,以便提高電機的輸出轉(zhuǎn)矩。
原因二:
步進電機及所帶負載存在慣性,由于步進電機自身及所帶負載存在慣性,使得電機在工作過程中不能立即起動和停止,而是在起動時出現(xiàn)丟步,在停止時發(fā)生越步。
解決方法:
通過一個加速和減速過程,即以較低的速度起動,而后逐漸加速到某一速度運行,再逐漸減速直至停止。
原因三:步進電動機產(chǎn)生共振
共振也是引起丟步的一個原因。步進電機處于連續(xù)運行狀態(tài)時,如果控制脈沖的頻率等于步進電機的固有頻率,將產(chǎn)生共振。
解決方法:
一、適當(dāng)減小步進電機的驅(qū)動電流;
二、采用細分驅(qū)動方法;
三、采用阻尼方法,包括機械阻尼法。
以上方法都能有效消除電機振蕩,避免丟步現(xiàn)象發(fā)生。
那有沒有一款步進驅(qū)動芯片可以內(nèi)部集成算法來優(yōu)化電機性能,防止丟步呢?
針對步進電機丟步的問題,Trinamic推出的TMC5160電機驅(qū)動芯片的DcStep功能可以有效防止電機丟步。
TMC5160的DcStep功能介紹:
DcStep 能讓電機在其負載極限和速度極限附近運行而不失步。如果電機上的機械負載增加到堵轉(zhuǎn)負載點,電機會自動降低速度,這樣它仍然可以驅(qū)動負載。
有了這個功能,電機將不會堵轉(zhuǎn)。除了在較低速度下增加扭矩之外,動態(tài)慣性將允許電機通過減速克服機械過載。
DcStep 直接與斜坡發(fā)生器集成,因此即使電機速度因機械負載增加而需要降低,也能達到目標(biāo)位置。
DcStep 可以在沒有任何失步的情況下達到 10 倍或更大的動態(tài)范圍。通過優(yōu)化高負載情況下的運動速度,該功能進一步提高了整體系統(tǒng)效率。
DcStep 優(yōu)勢:
電機在過載情況下不會失步
應(yīng)用程序可以更快的運行
自動實現(xiàn)最高的加速度
在速度極限下實現(xiàn)最高的能效
全步驅(qū)動達到最高電機扭矩

TMC5160 為外部增量編碼器提供編碼器接口。編碼器不僅用于失步的判斷,還可實現(xiàn)運動控制器的歸零功能(替代參考開關(guān))。
可編程預(yù)分頻器寄存器設(shè)置了編碼器分辨率以適應(yīng)電機分辨率。內(nèi)部包含 32 位編碼器計數(shù)器。
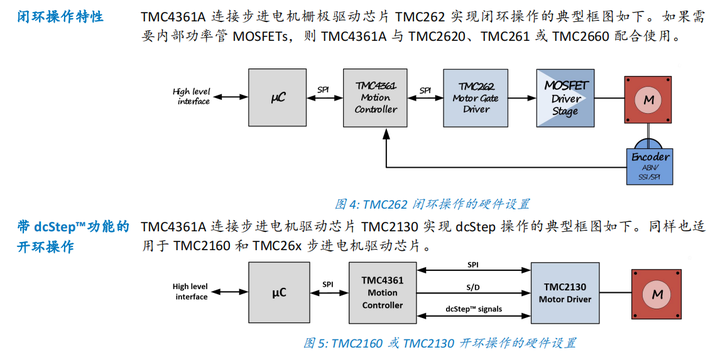
如果對位置要求非常高的應(yīng)用,又怕步進電機丟步,那就建議上閉環(huán)步進了,
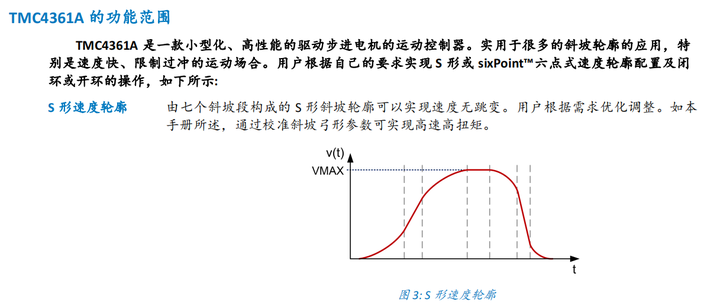
針對步進閉環(huán)應(yīng)用,Trinamic推出了一款帶S型加減速曲線的控制芯片---TMC4361,
并支持 sixPoint 六點式斜坡,進行了高速優(yōu)化,支持動態(tài)修改運動參數(shù)。 TMC4361A 包含 SPI 接口、Step/Dir 接口及閉環(huán)所需的編碼器接口。
審核編輯:湯梓紅
-
步進電機
+關(guān)注
關(guān)注
152文章
3158瀏覽量
149161 -
驅(qū)動電路
+關(guān)注
關(guān)注
155文章
1580瀏覽量
109616 -
自動控制
+關(guān)注
關(guān)注
10文章
721瀏覽量
44959
發(fā)布評論請先 登錄
電機常見的噪音、振動問題及解決方法
電機常見故障分析及解決方法

惠斯通電橋的常見故障及解決方法
步進電機的控制實現(xiàn)方法







 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論