") 雙極性步進(jìn)電機(jī)的基本組件有哪些
雙極性步進(jìn)電機(jī)的基本組件有哪些
在如今這個(gè)智能時(shí)代,步進(jìn)電機(jī)因其特有的開環(huán)位置控制性能而被廣泛應(yīng)用。各設(shè)備在步進(jìn)電機(jī)轉(zhuǎn)動(dòng)的過程中,對(duì)它輸出力矩的平滑性有一定的要求。轉(zhuǎn)動(dòng)的穩(wěn)定性除了和步進(jìn)電機(jī)的本體結(jié)構(gòu)有關(guān),也和步進(jìn)電機(jī)的控制方式息息相關(guān)。
本文將介紹雙極性步進(jìn)電機(jī)及其結(jié)構(gòu)和控制模式。
雙極性步進(jìn)電機(jī)的基本組件
步進(jìn)電機(jī)屬于無刷直流 (BLDC) 電機(jī),它按照等長(zhǎng)的步進(jìn)值逐步轉(zhuǎn)動(dòng)。而雙極性步進(jìn)電機(jī)則是每相都擁有一個(gè)繞組的步進(jìn)電機(jī),具體而言是兩相四線步進(jìn)電機(jī)。它由定子和轉(zhuǎn)子兩個(gè)主要部件組成(見圖 1)。
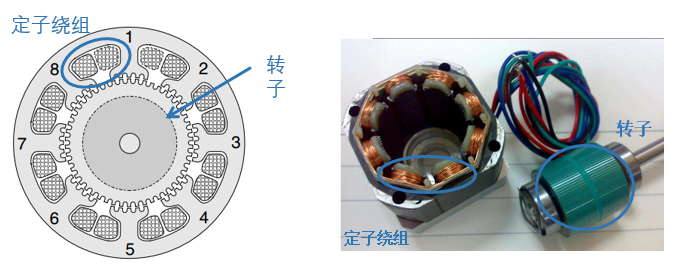
圖1: 雙極性步進(jìn)電機(jī)的結(jié)構(gòu)示意圖
定子
定子是電機(jī)的靜止部分。8 個(gè)定子上分別繞有兩相雙極性繞組,每個(gè)定子鐵芯上帶有五齒(見圖 1)。
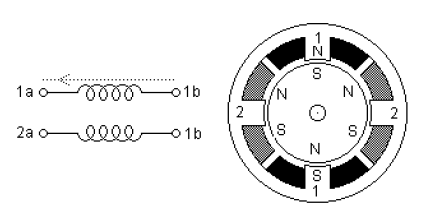
A 相繞組繞線從定子 1 開始繞,依次繞到定子3, 5, 7上(見圖 2)。 值得注意的是,定子 1 和 5 的繞線方向相同,而定子 3 和 7 的繞線方向相同。這兩組(定子 1 和 5,以及定子 3 和 7)的繞線方向相反。B 相繞組也是以同樣的原理進(jìn)行繞制,其中定子 4 和 8 為一組,定子 2 和 6 為一組。
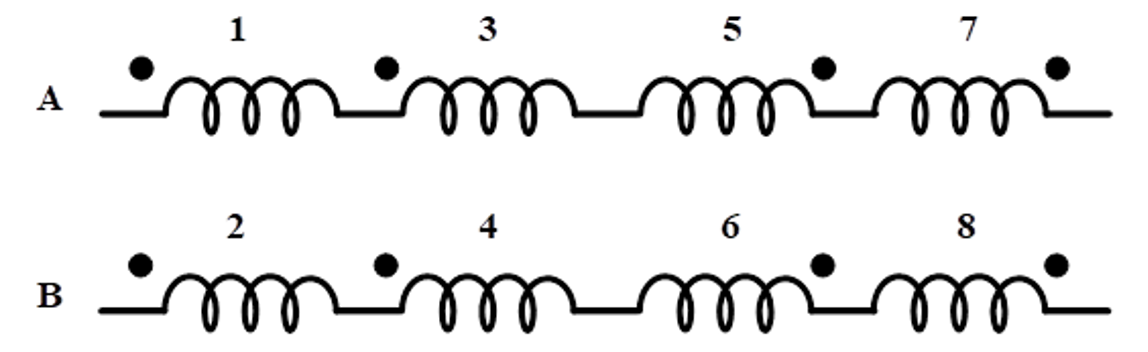
圖2: 雙極性步進(jìn)電機(jī)的繞組原理圖
轉(zhuǎn)子
通常轉(zhuǎn)子上貼有軸向充磁的永磁體。圖 3 所示為轉(zhuǎn)子的結(jié)構(gòu)。
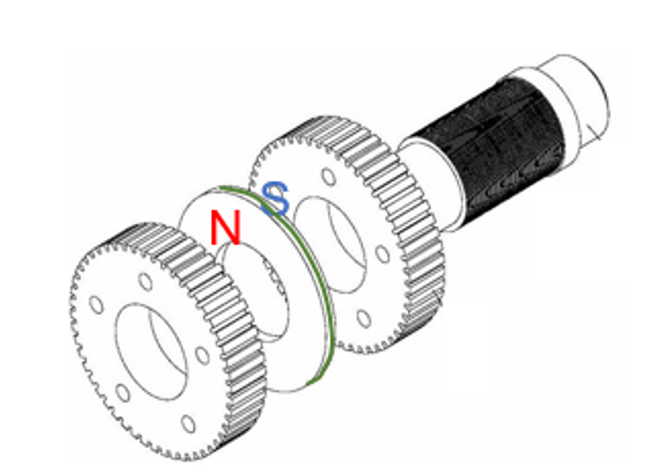
圖3: 轉(zhuǎn)子結(jié)構(gòu)示意圖
圖 4 展示了轉(zhuǎn)子的側(cè)面截面圖。
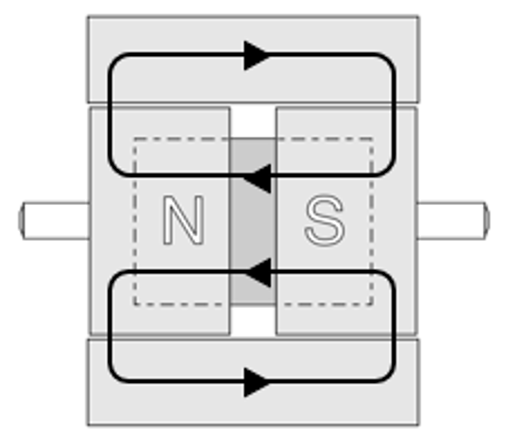
圖4:轉(zhuǎn)子側(cè)面截面圖
永磁體的磁力線在電機(jī)本體內(nèi)形成閉合。由于磁力線和磁阻效應(yīng),即使步進(jìn)電機(jī)在不通電的情況下也有一定的鎖定力矩(見圖 4)。
轉(zhuǎn)子上擁有 50 個(gè)齒,和定子齒輪相對(duì)起來,由于這樣的齒數(shù)和相數(shù)結(jié)構(gòu),它擁有 1.8 度的步進(jìn)角度(見圖 5)。步進(jìn)角度:電氣周期完成 90 度,步進(jìn)電機(jī)轉(zhuǎn)子前進(jìn)的機(jī)械角度。
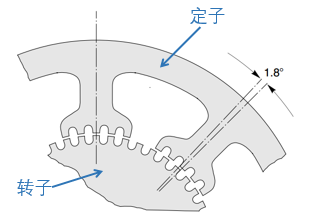
圖5: 1.8°步進(jìn)角度結(jié)構(gòu)示意圖
討會(huì) 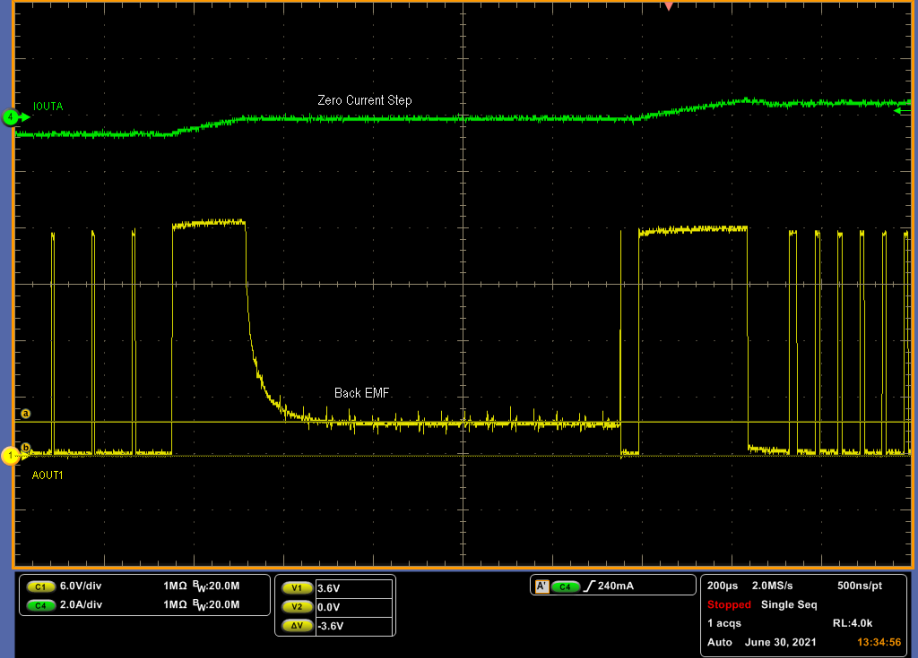
步進(jìn)電機(jī)和反電動(dòng)勢(shì)
了解電動(dòng)勢(shì)(EMF)及其對(duì)步進(jìn)電機(jī)運(yùn)動(dòng)的影響等
文章 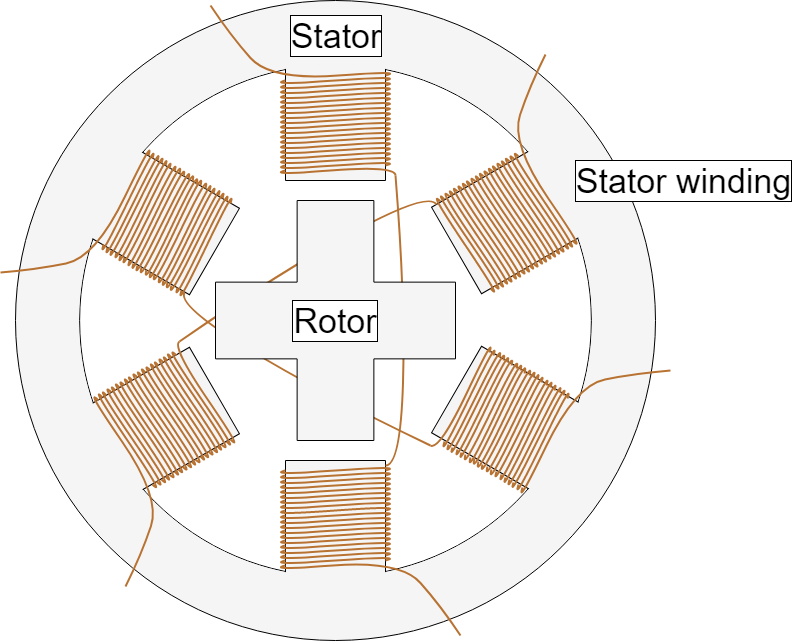
步進(jìn)電機(jī)基礎(chǔ)知識(shí):類型、用途和工作原理
了解步進(jìn)電機(jī)的基礎(chǔ)知識(shí)
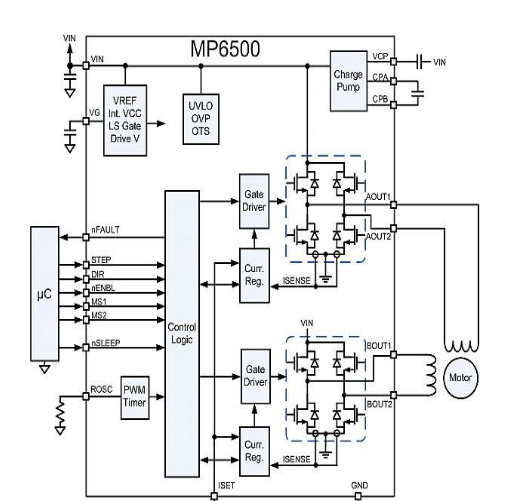
了解帶微步進(jìn)功能的 MPS 集成雙極性步進(jìn)電機(jī)驅(qū)動(dòng)器
應(yīng)用模塊 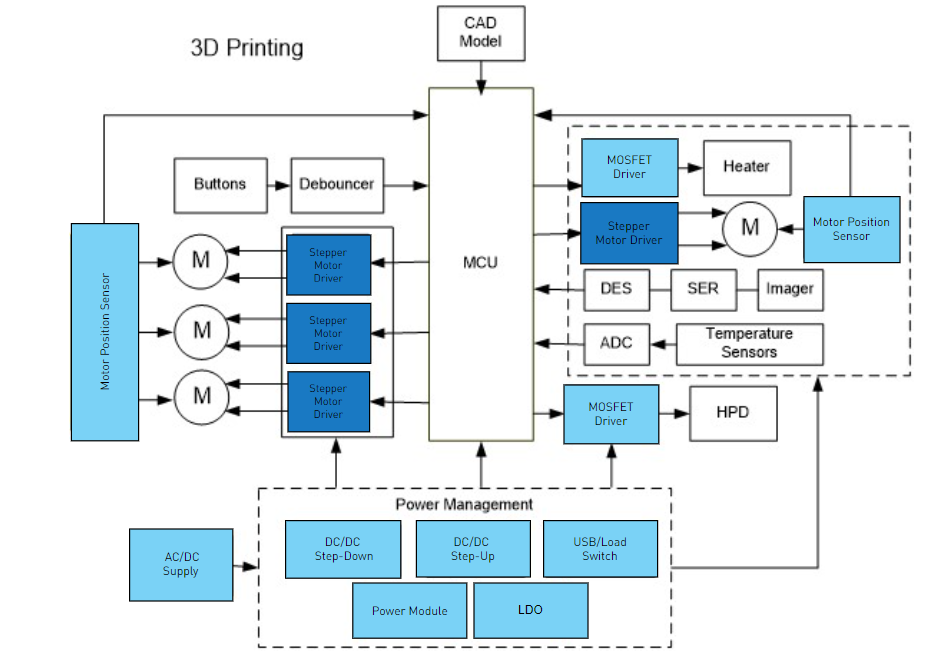
3D 打印機(jī)
MPS 為下一代 3D 打印機(jī)設(shè)計(jì)提供了最佳解決方案
步進(jìn)模式
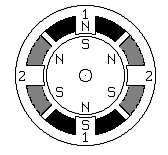
為了方便講解后續(xù)的控制方式,我們將復(fù)雜的結(jié)構(gòu)圖簡(jiǎn)化為示意圖(見圖 6)。
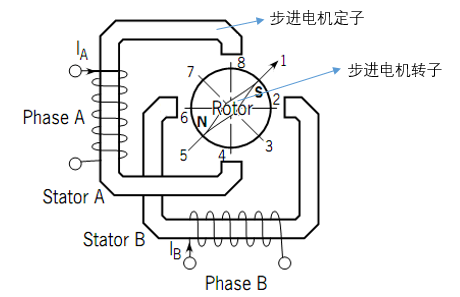
圖 6:雙極性步進(jìn)電機(jī)簡(jiǎn)化示意圖
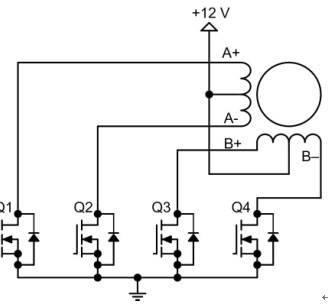
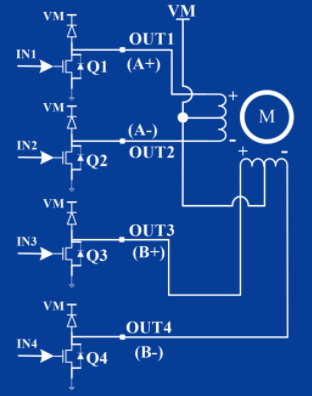
步進(jìn)電機(jī)的定子和轉(zhuǎn)子可以被看作都只有一個(gè)齒,這使步進(jìn)電機(jī)的驅(qū)動(dòng)方式不同于其他電機(jī)。這種方法叫做雙全橋驅(qū)動(dòng),其中 A 相繞組接在第一個(gè)全橋驅(qū)動(dòng)上, B 相繞組接在第二個(gè)全橋驅(qū)動(dòng)上(見圖 7)。
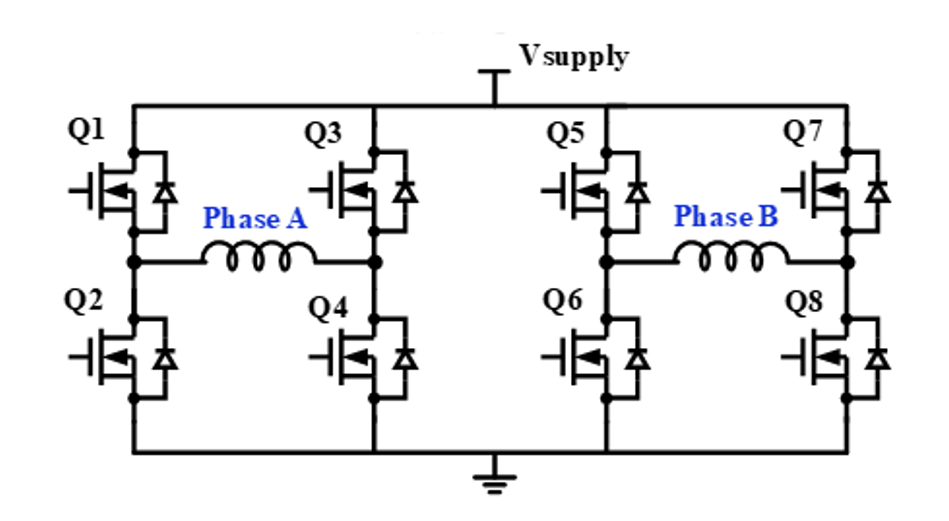
圖 7:雙全橋驅(qū)動(dòng)電路圖
雙極性步進(jìn)電機(jī)具有三種控制模式:?jiǎn)蜗嗖竭M(jìn)、整步步進(jìn)和半步步進(jìn)(見表 1)。
表1: 步進(jìn)模式表
| 步進(jìn)模式 | 通電順序 | 電氣角位置 |
| 單相步進(jìn) | $A > B >上線{A} >上線{B}美元 | 8美元 > 2美元 > 2美元 > 4美元 > 6美元 |
| 整步步進(jìn) | $AB >上線{A}B >上線{AB} >A上線{B}$ | 1美元 > 3美元 > 5美元 > 7美元 |
| 半步步進(jìn) | $AB > B > > 上線{A} B >上線{A} >上線{A} >上線{A} >上線{AB} >上線{B} >A上線{B} >A上線{B} >A$ | 1美元 > 2美元 > 2 > 2美元 > 3 > 3 > 4 > 4 > 5 > 5 > 5 > 6 > 6 > 7 > 7 > 8美元 |
單相步進(jìn)
當(dāng) A 相和 B 相按照單相步進(jìn)的模式依次通電的時(shí)候,定子磁場(chǎng)會(huì)相應(yīng)地發(fā)生變化,轉(zhuǎn)子也會(huì)由于極性吸引而轉(zhuǎn)動(dòng)。表 1 中詳細(xì)描述了 A 相和 B 相 (AB) 的通電順序和轉(zhuǎn)子的轉(zhuǎn)動(dòng)位置。
單相步進(jìn)過程具體包括三個(gè)步驟,如下所述:
當(dāng) A 通電的時(shí)候,驅(qū)動(dòng)電流由 Q1 流向 Q4。此時(shí)定子 A 上端為 N,下端在 S,轉(zhuǎn)子轉(zhuǎn)到位置 8(見圖 6)。
接下來,B 相通電,驅(qū)動(dòng)電流由 Q5 流向 Q8。此時(shí)定子 B 左端為 S,右端為 N,轉(zhuǎn)子轉(zhuǎn)到位置 2(見圖 6)。
接下來兩個(gè)狀態(tài)原理和上面類似,循環(huán)這一通電順序,轉(zhuǎn)子就開始轉(zhuǎn)動(dòng)起來。
圖 8 顯示了單相步進(jìn) AB 相的電流波形。
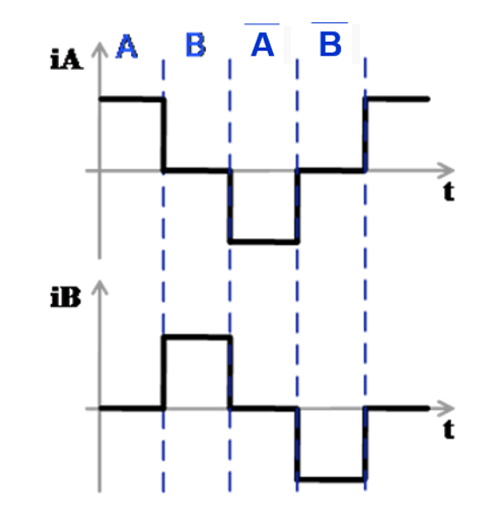
圖 8:?jiǎn)蜗嗖竭M(jìn) AB 相電流波形圖
整步步進(jìn)
與單相步進(jìn)不同的是,整步步進(jìn)式 AB 繞組會(huì)同時(shí)進(jìn)行通電。另外還有四個(gè)對(duì)應(yīng)的通電方式和轉(zhuǎn)子電氣位置,只是其位置空間在電氣空間上不同于單相步進(jìn)。根據(jù)整部的通電順序,轉(zhuǎn)子也能轉(zhuǎn)動(dòng)起來。圖 9 顯示了 AB 相的整步電流波形。
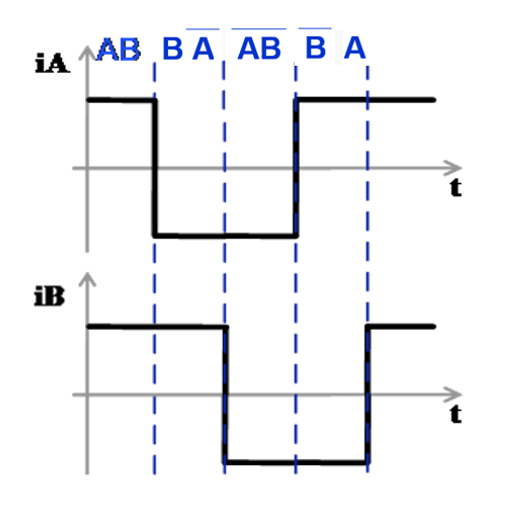
圖 9:整步步進(jìn) AB 相電流波形圖
半步步進(jìn)
半步模式將單相步進(jìn)和整步步進(jìn)這兩種控制方式進(jìn)行融合,它的電氣角度位置更多,電流波形更加細(xì)致,轉(zhuǎn)動(dòng)更加平滑。
圖 10 顯示了單相到兩相操作的非循環(huán)半步模式。這種模式在整步和半步之間交替生成 8 步序列。
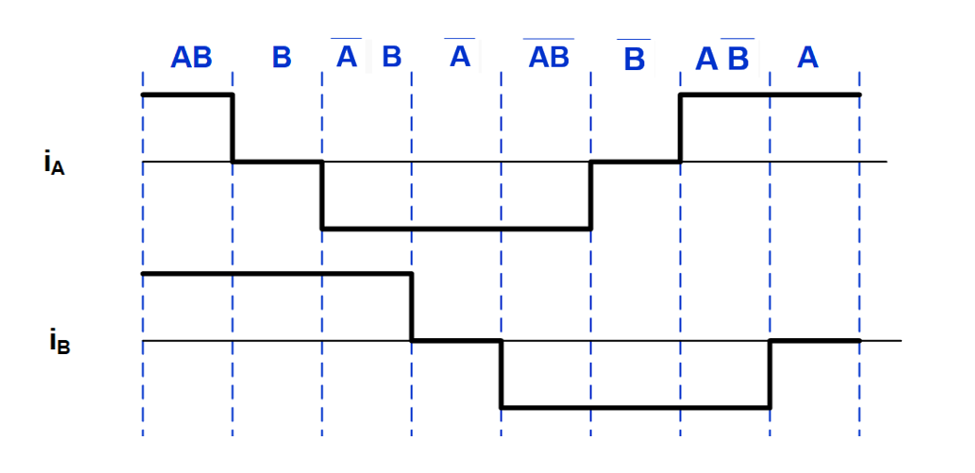
圖 10:非循環(huán)半步模式
結(jié)語
本文回顧了雙極性步進(jìn)電機(jī)的基本組件(定子和轉(zhuǎn)子),以及三種主要的控制模式:?jiǎn)蜗嗖竭M(jìn)、整步步進(jìn)和半步步進(jìn)。在下一篇文章中,我們將討論雙全橋驅(qū)動(dòng)的微步進(jìn)模式。
MPS 提供豐富的 步進(jìn)電機(jī)驅(qū)動(dòng)器 產(chǎn)品,可以滿足各種應(yīng)用需求。
審核編輯:彭菁
-
驅(qū)動(dòng)器
+關(guān)注
關(guān)注
54文章
8606瀏覽量
148958 -
步進(jìn)電機(jī)
+關(guān)注
關(guān)注
152文章
3153瀏覽量
149071 -
繞線
+關(guān)注
關(guān)注
5文章
49瀏覽量
9919
發(fā)布評(píng)論請(qǐng)先 登錄
雙極性步進(jìn)電機(jī)驅(qū)動(dòng)電路
解析雙極性步進(jìn)電機(jī)的基礎(chǔ)知識(shí)
兩相雙極性步進(jìn)電機(jī)的工作原理及仿真
雙極性步進(jìn)電機(jī)的基本結(jié)構(gòu)
步進(jìn)電機(jī)的線、相、極性分別是什么意思
單/雙極性步進(jìn)電機(jī)對(duì)比分析哪個(gè)好?
以四線雙極性步進(jìn)電機(jī)為例,教你如何解決步進(jìn)電機(jī)只顫不轉(zhuǎn)問題
步進(jìn)電的單極性驅(qū)動(dòng)與雙極性驅(qū)動(dòng)技術(shù)差異
永磁雙極性步進(jìn)電機(jī)原理

步進(jìn)電機(jī)的加減速控制
STM32物聯(lián)網(wǎng)項(xiàng)目之雙極性步進(jìn)電機(jī)
步進(jìn)電機(jī)的相關(guān)知識(shí):相、線、極性和步進(jìn)方式





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論