 全局思考,無人駕駛冠軍親述算法經驗
全局思考,無人駕駛冠軍親述算法經驗
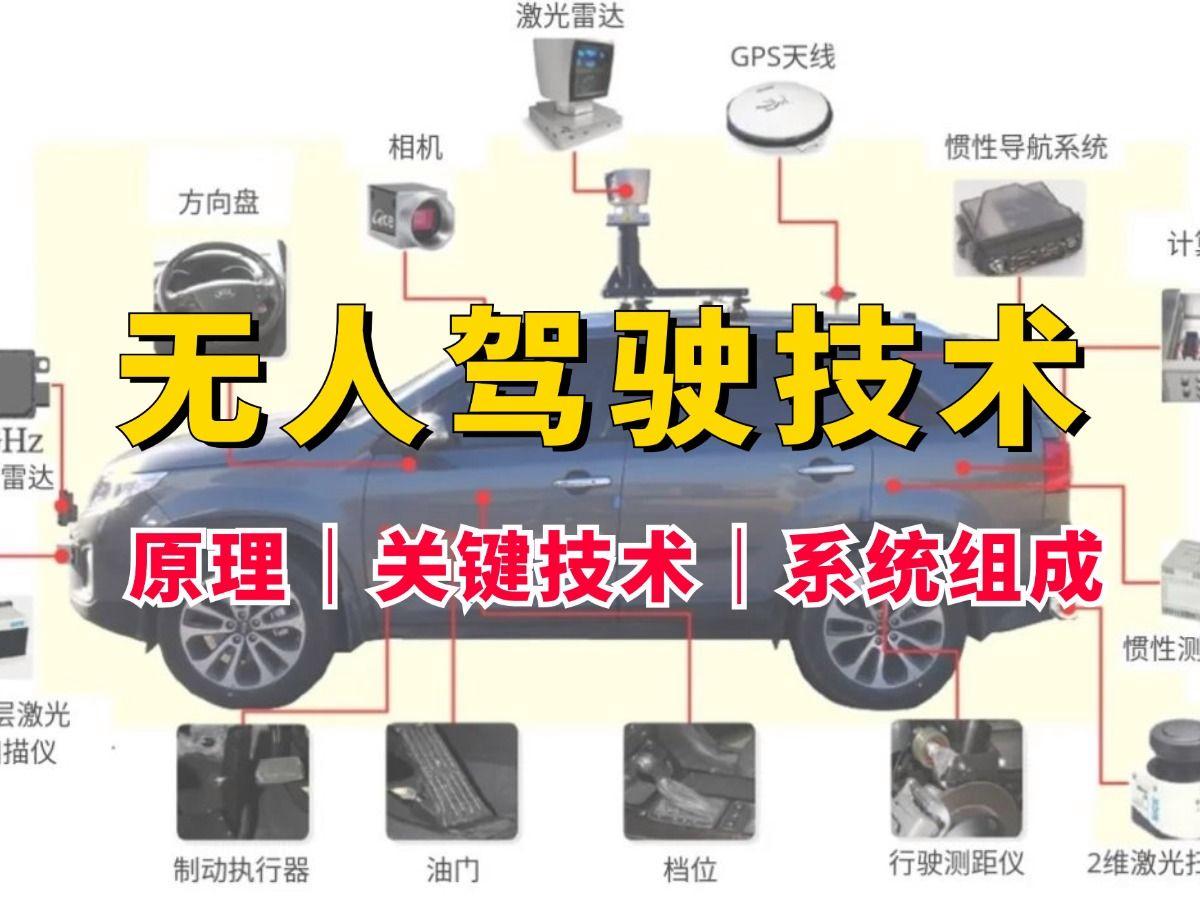
視覺是無人駕駛汽車的勘探物理世界的非常重要的“器官”。在它背后,考驗的則是機器算法能力。
無人駕駛技術的算法包括感知、定位、預測、決策、控制等層面,而在由創新工場、搜狗、美團點評、美圖公司聯合主辦的 AI Challenger 2018 全球 AI 挑戰賽中,無人駕駛賽道的題目就是最基礎的視覺感知,所有參賽隊伍需要解決如何通過視覺傳感器看到的數據,來感知判斷出障礙物、路標、汽車限速以及紅綠燈等維度的問題。
在近日的總決賽頒獎禮上,美團點評首席科學家夏華夏稱,由于視覺感知有上述諸多不同的識別維度,那在工程層面不可能對每項任務都做一個模型出來,最好的方案是由一個模型可以同時用視覺信號找到多種識別目標,但這并不容易。
根據大賽規定,此次自動駕駛賽道的評判標準分為兩部分,一是準確度,二是速度,后者在實驗室研究中很容易忽略,更具體來說,在測試和實際運行時,很少有參賽隊伍在比賽前考慮能否實現實時性檢測的問題。體現在算法上,關鍵的是要平衡算法執行效率和性能。
在歷時 3 個多月,經過數輪比賽角逐后,來自中科院自動化所 SeeLess 團隊最終斬獲了這一賽道的冠軍。那么,他們是如何讓算法發揮了最佳效果?
首先在數據上,主辦方給無人駕駛的賽道數據量約 1.2 億張,其中 10 萬張屬于標注數據。冠軍成員中的博士研究生趙旭在接受 AI科技大本營采訪時稱,標注數據中大約有 7 萬張是優質數據,他們驗證了 1 萬張圖片數據,2 萬張在測試時使用,剩下的則是未標注數據,他們用了自動化方法來處理這些數據。趙旭認為,龐大的數據量對訓練算法性能非常重要。
而在算法層面,執行效率分為兩部分:算法實現復雜度和工程實現的優化。基于此,他們同時做了幾個方案,另一冠軍成員朱優松在頒獎禮上舉例稱,就車道線行駛區域的判別以及道路上的物體檢測兩大任務,他們使用了同一模型來實現,以降低算法實現的復雜度,同時他們把神經網絡進行壓縮,并使用了“老師教學生(大模型教小模型)”的方法。
而工程實現上他們注重細節,不斷調整優化,比如就可行駛道路區域分割問題,僅使用底層的計算機視覺特征并不足夠,他們還因此引入了一些全局特征,此外還將 GPU 并行做到極致,如此才達到了很好的效果。
“全局思考”是趙旭對這次比賽的經驗性總結,當然,基礎研究更要考慮工程實踐具體情況的觀點也尤為重要。
創新工場人工智能工程院執行院長王詠剛評價 SeeLess 團隊的成績時表示,他們在保持識別精度的同時識別性能也遠超其他團隊,在算法和工程的結合度上遠超預計,這代表未來不同的硬件平臺都可以利用先進的無人駕駛技術。
不過,視覺感知只是做無人駕駛的一個切面,要做好它需要考慮對技術棧的綜合應用,這包括很多軟硬件的能力。美團點評首席科學家、無人配送部總經理夏華夏認為,全場景下的無人駕駛技術應用還有很遠的距離,感知、定位、預測、規劃、控制每一方面都極具挑戰,如果要預估什么時候人們能普遍做上無人駕駛汽車,“十年之后”是他給出的一個非常樂觀的期限。
-
無人駕駛
+關注
關注
99文章
4156瀏覽量
122983 -
自動駕駛
+關注
關注
788文章
14226瀏覽量
169749
原文標題:全局思考,無人駕駛冠軍親述算法經驗 | AI challenger 2018
文章出處:【微信號:rgznai100,微信公眾號:rgznai100】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
智行者科技無人駕駛小巴落地海南

無人駕駛技術未來在哪里?低速才是突破口

內蒙古首個超百臺增程式無人駕駛礦卡項目落地
無人駕駛解決方案包含哪些方面?感知、決策與控制
易控智駕發布礦山無人駕駛應用落地成果
DeepSeek眼中的礦山無人駕駛
為什么聊自動駕駛的越來越多,聊無人駕駛的越來越少?

小馬智行第六代無人駕駛Robotaxi亮相香港國際機場
UWB模塊如何助力無人駕駛技術
特斯拉推出無人駕駛Model Y
易控智駕無人駕駛項目落地紅沙泉露天煤礦
5G賦能車聯網,無人駕駛引領未來出行

無人駕駛汽車應用晶振TSX-3225






 工商網監
工商網監
評論