 破局AGV導航精度之困:富唯智能以硬核技術穿透環境迷障
破局AGV導航精度之困:富唯智能以硬核技術穿透環境迷障
一個核心命題:有那些因素會影響AGV導航精度?富唯智能以十年技術沉淀,打造抗干擾、自學習、高魯棒性的AGV系統,穿透環境迷障,重塑工業物流的精準標尺。
一、環境迷障:三大精度殺手與富唯的破局利器
光照、地面、溫濕——這些有那些因素會影響AGV導航精度的變量,恰是富唯技術攻堅的靶點:
1.強光干擾:陽光直射導致激光信號散射?富唯AGV搭載抗強光激光雷達,融合3D避障相機與紅外補償技術,在汽車廠玻璃幕墻環境下仍保持±5mm定位精度;

2.地面陷阱:濕滑、不平整地面引發打滑偏移?自研高靈敏度打滑重定位算法動態降低里程計權重,0.5秒內校準位置,醫藥車間實測濕滑路面通過率99.3%;
二、技術破壁:從“被動響應”到“主動防御”的算法革命
面對有那些因素會影響AGV導航精度的深層挑戰,富唯以三大技術引擎重構AGV內核:
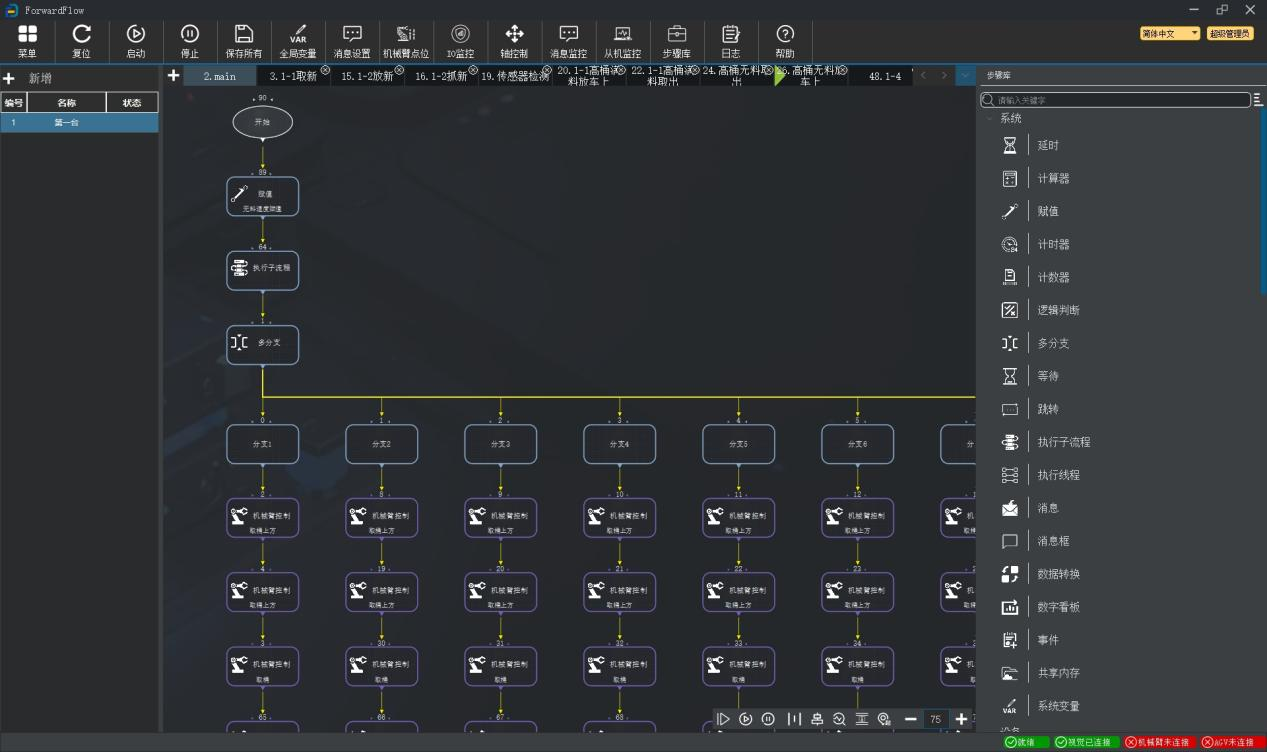
AI-ICDP智能協同決策平臺
1.動態環境建模:激光SLAM實時構建地圖,UWB超寬帶通信技術實現300臺集群位置共享,突發障礙物響應速度0.1秒;

2.路徑自優化:在新能源電池產線窄通道場景,算法自動壓縮迂回路徑,空載率從15%降至3%,吞吐量提升40%。
當行業仍在爭論有那些因素會影響AGV導航精度時,富唯智能已用多傳感器融合、自適應算法、抗干擾硬件構建護城河。從粉塵車間到玻璃幕墻廠房,從冰面到油污地面——環境變量不再是精度枷鎖,而是技術進化的催化劑。
審核編輯 黃宇
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
AGV
+關注
關注
27文章
1431瀏覽量
41999
發布評論請先 登錄
相關推薦
熱點推薦
復合機器人的重復定位精度能達到多少?
復合機器人的重復定位精度能達到多少?富唯智能以±0.02mm的硬核實力,為企業提供從毫米級操作到跨場景協同的全棧解決方案。無論是電子元器件的

工業機器人的未來發展方向:富唯智能以具身智能重構人機協作新范式
大維度突破。作為這一領域的領跑者,富唯智能以自主研發的具身智能工業機器人技術矩陣,重新定義了智能
3D視覺相機遇到臟污怎么預防?富唯智能以創新技術守護工業“慧眼”
。如何破解這一行業痛點?3D視覺相機遇到臟污怎么預防的答案,不僅在于日常維護,更需從技術底層革新與系統性防護入手。富唯智能憑借自主研發的“智能

硬核技術破局人形機器人量產瓶頸!世強硬創慕展創新方案引行業關注
能力,成為展會現場關注的焦點,也為行業提供了人形機器人規模化量產的可行技術路線。 機器人整體解決方案 技術破局:機器人量產的三大核心挑戰 當前,人形機器人行業正面臨
發表于 04-27 16:19
?142次閱讀

顛覆傳統物流:富唯智能以“機器人分揀”技術重構效率新邊界
局?機器人分揀技術以顛覆性姿態登場,成為物流企業智能化升級的核心引擎。而在這股浪潮中,富唯智能憑
復合機器人是通過什么導航方式?
在智能制造浪潮中,復合機器人是通過什么導航方式實現高精度、強適應性的自主作業?這一問題的答案,不僅關乎技術路徑的選擇,更決定了工業柔性化的未來高度。作為行業領軍者,
具身智能工業機器人路徑規劃算法成為破局關鍵
在工業4.0與智能制造深度融合的今天,傳統路徑規劃算法已難以滿足動態生產環境的需求。面對復雜場景下的高精度避障、實時決策與多任務協同挑戰,具身智能
一種基于分數階 PID 直流電機調速的 AGV 控制系統
電傳感器實現避障,并采用上位機對其進行監控。為達到 AGV 電機調速的穩定性與實時性,采用分數階 PID 算法進行控制,通過 Matlab軟件進行建模與仿真,驗證其可行性。最后,經實際應用場合驗證,AGV 小車具有抗干擾能力強,
發表于 03-25 15:10
柔性裝配新紀元:富唯智能以AI-ICDP驅動工業制造高效轉型
在全球制造業加速邁向智能化、個性化的今天,傳統裝配產線正面臨多重挑戰:產品迭代頻繁、定制化需求激增、人力成本攀升……如何以柔性化能力應對市場波動,成為企業破局的關鍵。富

智能驅動未來:富唯智能 AGV 叉車引領工業物流新變革
在智能制造與物流自動化浪潮中,AGV 叉車已成為企業降本增效、升級轉型的核心裝備。作為行業領先的智能解決方案提供商,富唯

富唯智能上下料機器人:自動化生產的得力助手
富唯智能的上下料機器人憑借其精準高效的操作、多功能應用的特點、智能調度的優勢、安全穩定的性能以及專業的服務支持,成為了眾多企業自動化生產線的

富唯智能復合機器人:解鎖工業生產新效能
在當下工業生產的激烈競爭中,降本增效、提升產品質量是企業發展的關鍵。然而,傳統生產模式在搬運效率、定位精度等方面的短板,成了企業前行路上的 “攔路虎”。別擔心,富唯智能復合機器人的出現

AGV激光導航定位技術綜述與發展趨勢
AGV是自動導引運輸車,激光導航AGV具有高可靠性和柔性,需存儲完整地圖信息。地圖構建重要,激光導航結合新導航方式可提高

智能呼叫、激光導航、自動避障,為什么AGV機器人被需要?
AGV機器人通過感應、導航等技術提升制造靈活性,滿足定制化需求,節省人力成本。AGV小車與智能制造系統交互,實現高效生產。新興

探索未來智能制造新篇章——富唯智能復合機器人
在科技飛速發展的今天,智能制造已成為推動產業升級的重要引擎。富唯智能憑借其在AI和機器人技術領域的深厚積累,推出了革命性的





 工商網監
工商網監
評論