 BLDC 電機的控制原理
BLDC 電機的控制原理
概述
本文主要介紹BLDC 電機控制的實現原理,還介紹了3類直流電機的工作方式以及控制的特點。從簡單的鉆機到復雜的工業機器人,許多機器設備都使用無刷直流電機將電能轉換為旋轉運動。掌握直流電機的控制是實現自動化控制的基本技能。
1 無刷電機介紹
1.1 電機原理
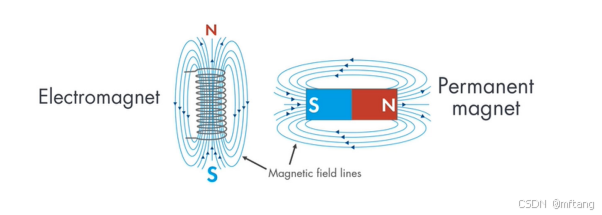
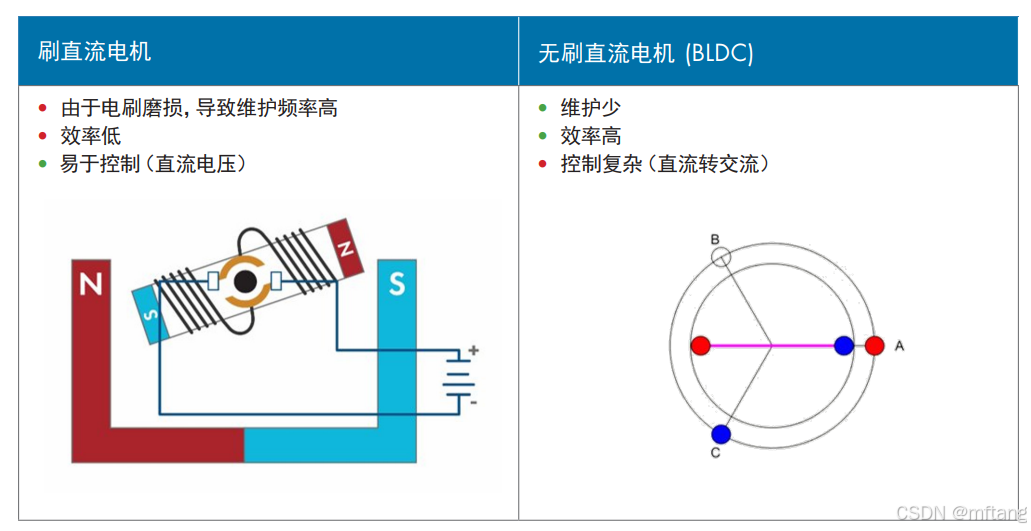
無刷直流電機也稱為 BLDC 電機,相比有 刷直流電機具備諸多優勢。BLDC 電機更高 效,所需的維護更少,因而已在許多應用中取 代了有刷電機。 兩類電機的運行原理相似,均由永磁體和電磁體的磁極吸引和排斥產生旋轉運動。但這些電機的控制方 式卻大不相同。BLDC 需要復雜的控制器才能將單個直流電源轉換為三相電壓,而有刷電機可以通過調 節直流電壓來控制。
有刷直流電機和無刷直流電機的比較:
1.2 電機的類型
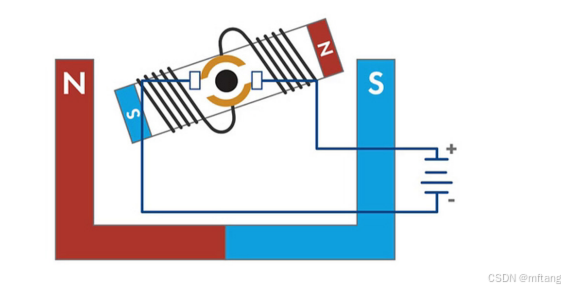
1.2.1 有刷直流電機
在有刷直流電機中,直流電流通過轉子 的線圈繞組,使電磁體產生極性。這些轉子的磁極與 固定永磁體(稱為定子)的磁極相互作用,從而使轉子旋轉。

1.2.2 無刷直流電機(BLDC)
BLDC 電機采用電子換相來代替機械換相,克服了有 刷電機的上述缺陷。為了更好地理解這一點,有必要 進一步了解 BLDC 電機結構。 BLDC 電機與有刷電機構造相反,其永磁體安裝在轉 子中,而線圈繞組則成為定子。
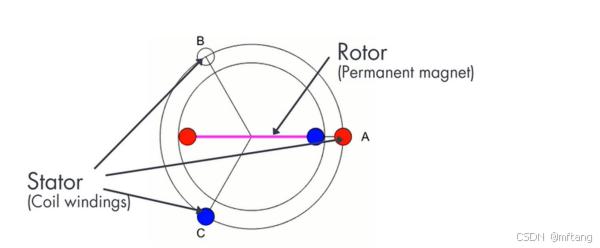
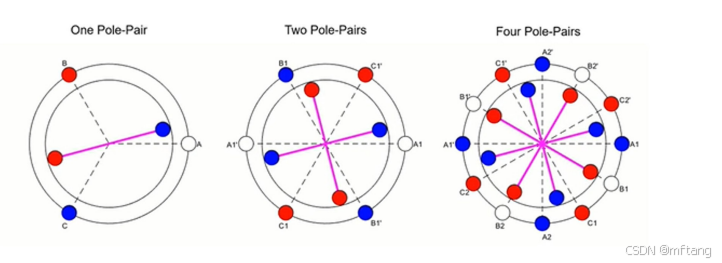
電機的磁體布局不盡相同,定子可能具有不同數量的 繞組,而轉子可能具有多個極對,如以下動畫所示。
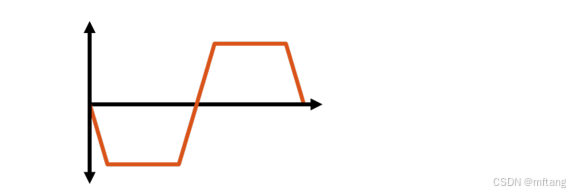
無刷直流電機的電勢:BLDC 梯形反電動勢 采用梯形換相控制
1.2.3 永磁同步電機 (PMSM)
PMSM和BLDC 的結構類似,其永磁體均置于轉子,并被定義為同步電機。在同步電機中,轉子與定 子磁場同步,即轉子的旋轉速度與定子磁場相同。 它們的主要區別在于其反電動勢(反 EMF)的形狀。電機在旋轉時充當發電機。也就是說,定子中產生感 應電壓,與電機的驅動電壓反向。反電動勢是電機的重要特征,因為其形狀決定了對電機進行最優控制所 需的算法
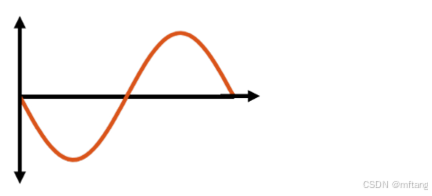
PMSM的電勢:正弦反電動勢,采用磁場定向控制
2 BLDC 電機控制的概述
2.1 無刷直流 (BLDC) 電機控制介紹
與機械換相或“有刷”電機相比,電子換相或“無刷”電機以其更高的電效率和轉矩重量比而一直倍受歡迎。無刷直流 (BLDC) 電機和永磁同步電機 (PMSM)的差異主要如下:
永磁同步電機 (PMSM)的控制方式:
1)采用分布式定子繞組而呈現正弦反電動勢
2)只使用磁場定向控制
無刷直流 (BLDC) 電機)的控制方式:
1)采用集中式繞組,其反電動勢呈現梯形
2)可選擇使用磁場定向控制

2.2 無刷直流電機的控制方法
無刷直流電機通常使用梯形控制,但也會使用磁場定向控制。梯形 BLDC 電機控制是一種比磁場定向控制更簡單的方法。通過這種方法,一次僅為兩相供電。轉矩控制僅需一個 PID 控制器,而且與磁場定向控制相反,它無需使用帕克變換和克拉克變換進行坐標變換。
3 六步換相
3.1 原理簡介
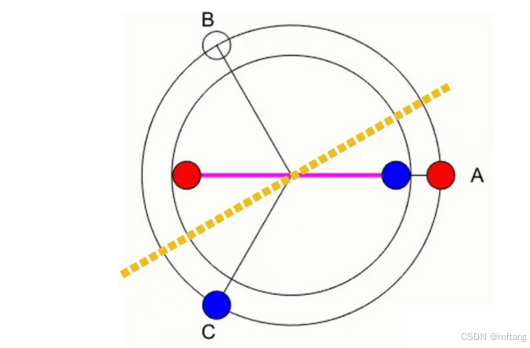
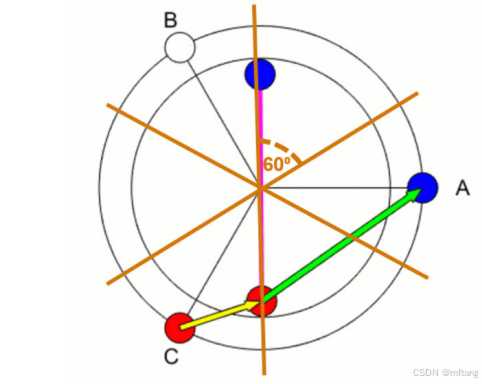
為了更好地理解施加外部電壓時 BLDC 電機的行為,我 們將使用前面介紹的配置,其中轉子由單極對組成,而定 子由夾角為 120 度的三個線圈組成。讓電流通過線圈,給 線圈(此處稱為 A 相、B 相和 C 相)通電。轉子的北極用 紅色表示,南極用藍色表示。 一開始,線圈沒有通電,轉子處于靜止狀態。在 A 相與 C 相之間施加電壓(如動畫所示),即會沿虛線產生復合磁 場。這使轉子開始旋轉,從而與定子磁場對齊。
線圈對共有六種通電方法,如下所示。每次換相后,定子 磁場相應旋轉,從而帶動轉子,使之旋轉至圖示位置。在 下面的動畫中,轉子角度是相對于水平軸而言的,轉子共 有六種對齊方式,兩兩相差 60 度。
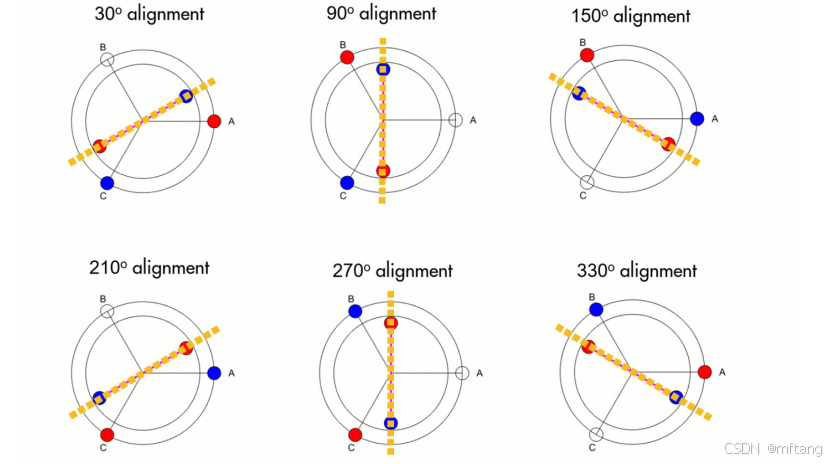
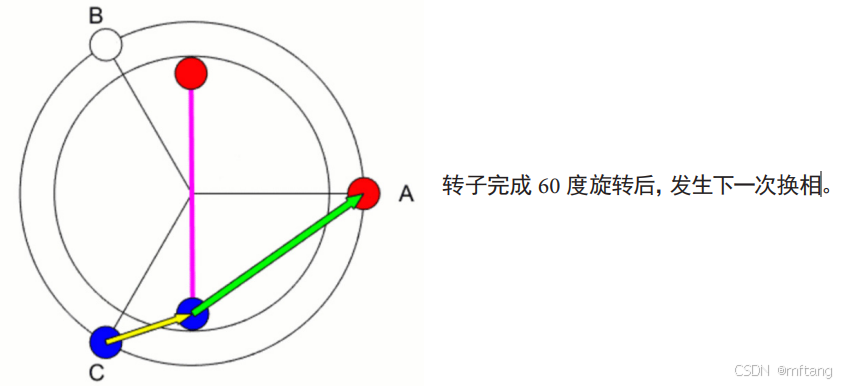
也就是說,如果每 60 度以正確的相位執行一次換相,電機將連續旋轉,如以下動畫所示。此類控制被稱為 六步換相或梯形控制。
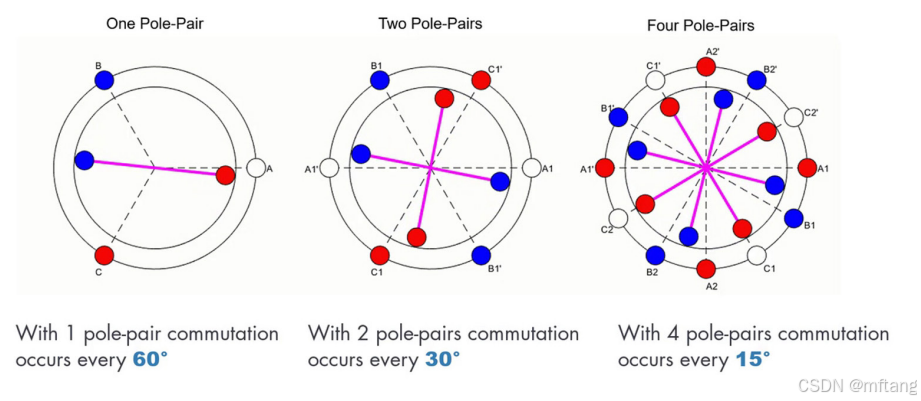
此類電機可以包含更多極對,但這就要求更為頻繁地換相。為了在合適的時機以正確的相位執行電機換 相,控制器需要時刻掌握轉子的確切位置,對此通常使用霍爾傳感器進行測量。
3.2 電機和扭矩產生
將鼠標懸停在動畫上,可查看兩極如何相互作用。箭頭表示相對磁力,箭頭粗細表示場強。相同磁極相互 排斥,從而使轉子逆時針旋轉。同時,相反磁極相互吸引,從而在同一方向增加扭矩。
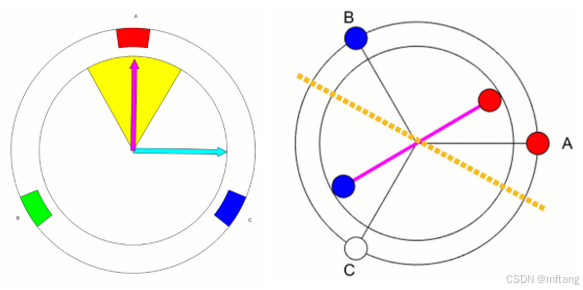
將先前討論的定子磁場疊加到動畫中,可以很明顯地看 出,在這種換相方式中,轉子從不對齊定子磁場(圖中的 黃色虛線),而是一直在追趕定子磁場。
在 BLDC 電機中采用這種方式換相有兩個原因。首先,如果 允許轉子和定子磁場完全對齊,此時產生的扭矩為零,這不 利于旋轉。其次,磁場夾角為 90 度時可產生最大扭矩。因 此,目標是使該夾角接近 90 度。
但在 BLDC 電機中,采用六步換相無法讓夾角始終保持 90 度,夾角將在 60 度和 120 度之間波動,如以下動畫所示。 這是因為梯形控制的性質相對簡單。磁場定向控制等更先 進的方法可實現定子與轉子磁場間 90 度夾角,以此產生更 大的扭矩,該方法常用于之前提到的 PMSM 控制。
為了在六步換相過程中控制相位,可使用三相逆變器將直流電引導到三個相,從而在正(紅)負(藍)電流 之間切換。為了向其中一個相供應正電流,需要打開連接到該相的高端開關,要供應負電流,則需要打開低端開關。
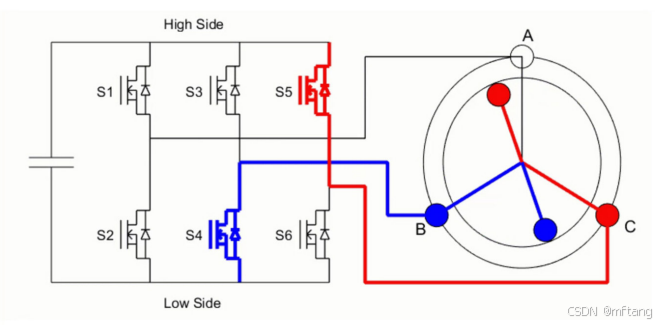
當轉子與定子磁場夾角在 60 至 120 度之間時,按上述模式執行此操作,三相逆變器可使電機保持勻速旋 轉。要改變電機速度,可以調節施加的電壓。要在不改變電源電壓的前提下控制電機速度,則可以采用脈寬調制 (PWM)。
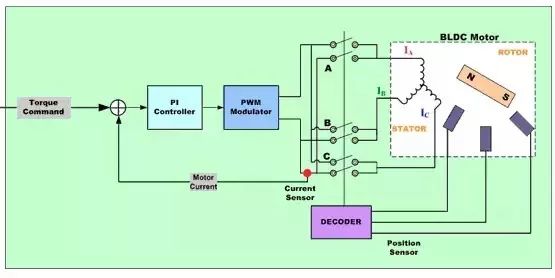
5 控制模型的建立
使用梯形方法設計 BLDC 電機控制器的電機控制工程師需要執行下列任務:
1) 開發控制器架構,其中包含用于電流/電壓內環的 PI 控制器
2) 為可選的轉速外環和位置外環開發 PI 控制器
3) 調節所有 PI 控制器的增益以滿足性能要求
4) 設計 SVM 控制
5) 設計故障檢測和保護邏輯
6) 驗證和確認控制器在不同工況下的性能
7) 在微控制器上實現定點或浮點控制器
原文鏈接:https://blog.csdn.net/mftang/article/details/145789600
-
電機控制
+關注
關注
3567文章
1948瀏覽量
271249 -
無刷直流電機
+關注
關注
61文章
699瀏覽量
47217 -
BLDC電機
+關注
關注
7文章
220瀏覽量
21904 -
有刷直流電機
+關注
關注
1文章
106瀏覽量
13077
發布評論請先 登錄







 工商網監
工商網監
評論