") 匯川伺服如何進行EtherCAT總線控制
匯川伺服如何進行EtherCAT總線控制

一、EtherCAT 技術(shù)特性概述
作為工業(yè)自動化領(lǐng)域的主流通信協(xié)議,EtherCAT 憑借其獨特的技術(shù)優(yōu)勢在復(fù)雜控制場景中得到廣泛應(yīng)用:
支持多樣化網(wǎng)絡(luò)布局,可靈活構(gòu)建總線型、星型或混合網(wǎng)絡(luò)架構(gòu)
采用標準以太網(wǎng)物理層,顯著降低系統(tǒng)部署與擴展成本
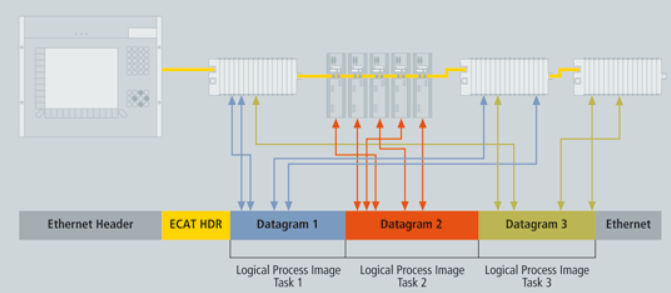
通過分布式時鐘同步機制,實現(xiàn) μs 級實時通信響應(yīng)
設(shè)備即插即用功能簡化系統(tǒng)維護流程
二、系統(tǒng)搭建與調(diào)試步驟
1. 硬件連接規(guī)范
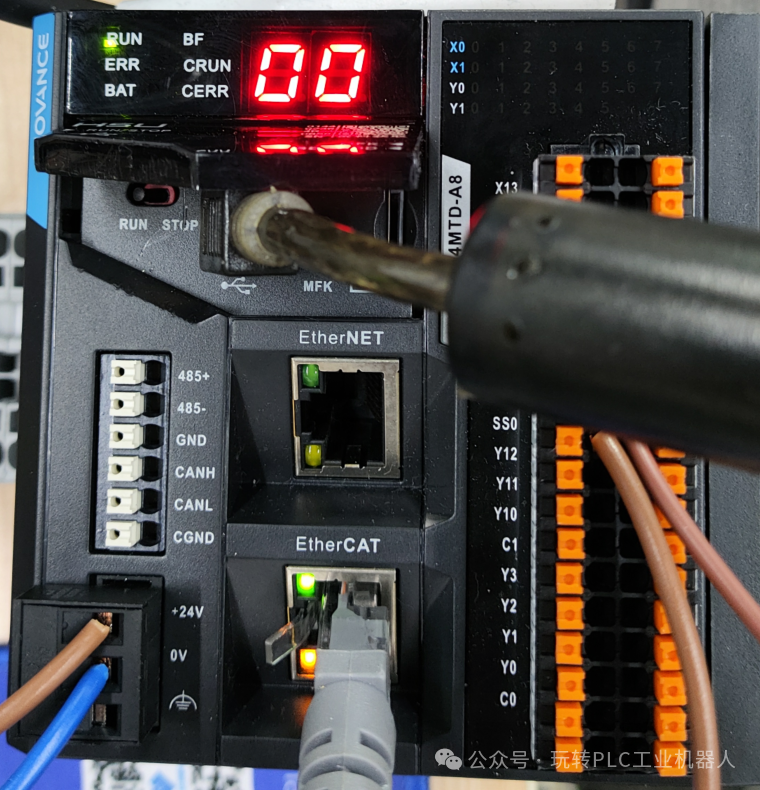
主站設(shè)備:匯川 H5U 系列 PLC(集成 EtherCAT 主站接口)
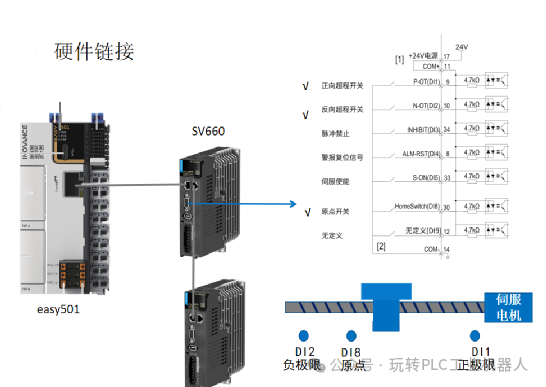
從站設(shè)備:SV660 伺服驅(qū)動器(標配 EtherCAT 通信模塊)
網(wǎng)絡(luò)連接:首先把通訊線插上,PLC下面的口插到驅(qū)動器CN3口,就可以了,驅(qū)動器不用做任何配置。(如果有第2臺伺服,可以從第一臺伺服的CN4口鏈接一根線到下一臺伺服的CN3即可,還有更多,同樣的添加方法,5U的PLC最多支持32軸控制)

2. 外圍信號接線
伺服驅(qū)動器的CN1端口的接線,主要需要連接的有3個信號(正極限、負極限、原點),伺服使能可以通訊直接控制,報警復(fù)位可以接上。接線圖如下所示:
3. 軟件配置流程
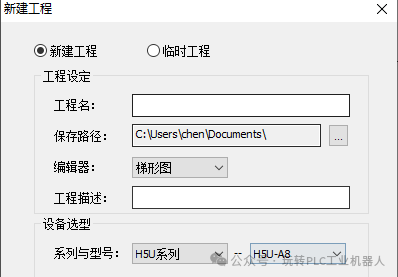
1)工程創(chuàng)建:在 InoProShop 中選擇對應(yīng) PLC 型號
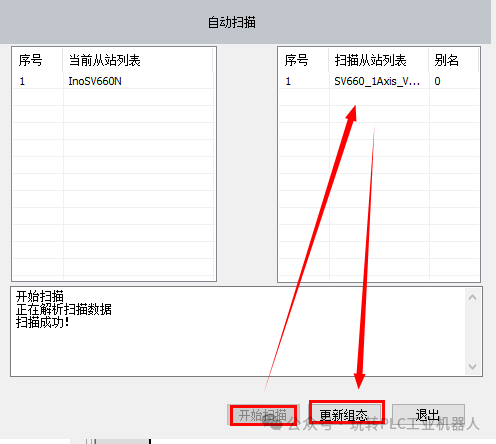
2)網(wǎng)絡(luò)掃描:通過 EtherCAT 主站自動識別伺服節(jié)點。
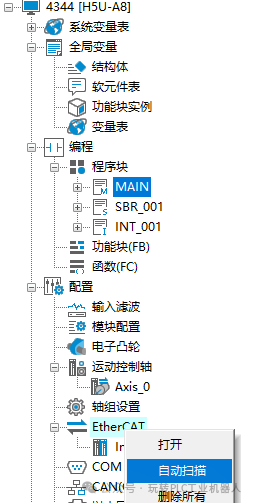
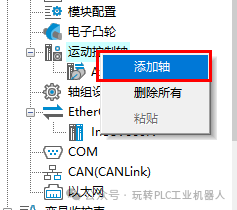
3)軸配置:
選擇掃描到的伺服設(shè)備作為輸出對象
配置電子齒輪比等運動參數(shù)
把程序下載到PLC里面。
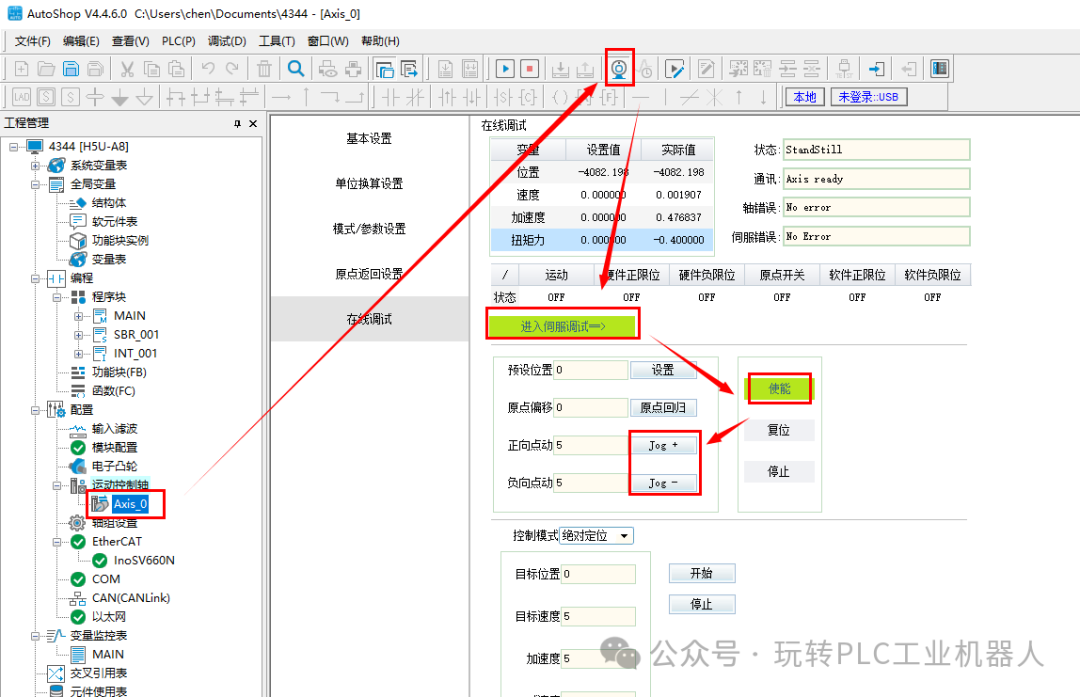
4. 功能驗證與調(diào)試
M0 激活點動功能
M10/M11 分別控制正反轉(zhuǎn)方向
伺服使能:軟件使能按鈕可以進行伺服使能
點動測試:
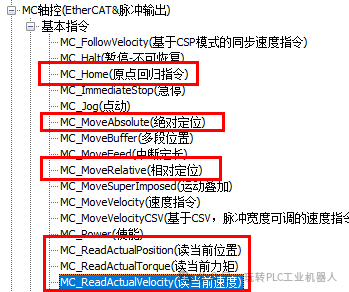
三、系統(tǒng)功能模塊解析
使能控制模塊
把使能的塊拉過來,當M100導(dǎo)通,伺服就會使能,可以進行定位控制。
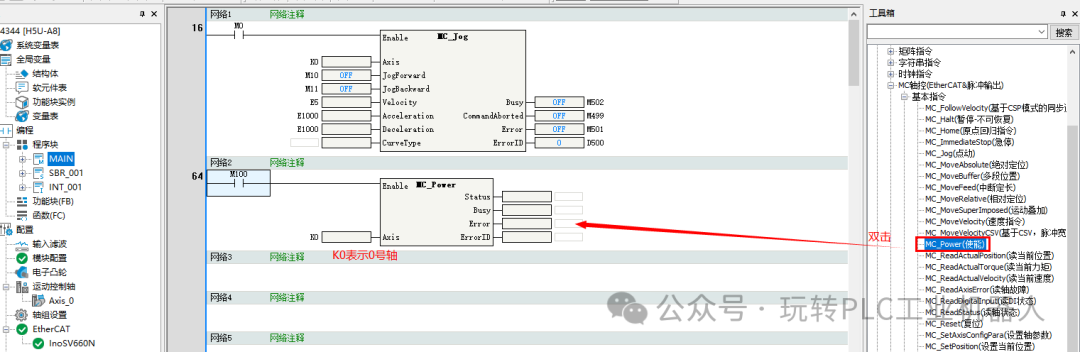
2.使能點動控制塊
把JOG的塊拖過來,第一個K0表示0號軸,當M0導(dǎo)通軸就開始轉(zhuǎn)動,需要配合M10或者M11,M10表示正轉(zhuǎn),M11表示反轉(zhuǎn)(其他點位,當你的鼠標放在對應(yīng)引腳上面時,會自動顯示對應(yīng)的中文含義,可以看出其對應(yīng)的功能)

3.定位控制模塊
絕對定位:指定目標位置與速度參數(shù)
相對定位:基于當前位置的位移增量控制
原點回歸:支持多種尋原點模式(如 Z 相信號捕捉)
好了,本文就給大家講解到這里,詳細功能大家可以通過實操自己去學(xué)習(xí)。
來源:玩轉(zhuǎn)PLC工業(yè)機器人。
-
驅(qū)動器
+關(guān)注
關(guān)注
54文章
8689瀏覽量
149855 -
plc
+關(guān)注
關(guān)注
5036文章
13903瀏覽量
474330 -
工業(yè)自動化
+關(guān)注
關(guān)注
17文章
2727瀏覽量
68321 -
ethercat
+關(guān)注
關(guān)注
19文章
1108瀏覽量
39991
原文標題:匯川伺服如何進行 EtherCAT總線控制
文章出處:【微信號:gkongbbs,微信公眾號:工控論壇】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
ethercat總線伺服如何控制 EtherCAT運行原理
labview通過Ethercat控制伺服電機
CRIO9082與匯川伺服ECT通訊異常求助

匯川伺服電機抖動調(diào)什么參數(shù)
CCLK IE轉(zhuǎn)EtherCAT依靠網(wǎng)關(guān)實現(xiàn)三菱PLC、匯川伺服高效通訊的案例?

EtherCAT轉(zhuǎn)CANopen網(wǎng)關(guān)與伺服器在匯川組態(tài)軟件上的配置步驟

基于EtherCAT轉(zhuǎn)Profinet網(wǎng)關(guān)接匯川伺服系統(tǒng)操作模式控制技術(shù)方案

EtherCAT主站轉(zhuǎn)Profinet網(wǎng)關(guān)接匯川伺服操作模式的控制解析

EtherCAT主站轉(zhuǎn)Profinet網(wǎng)關(guān)接匯川伺服實現(xiàn)速度控制功能

EtherCAT主站轉(zhuǎn)Profinet網(wǎng)關(guān)連接匯川伺服系統(tǒng)的操作模式控制技術(shù)方案
EtherCAT轉(zhuǎn)Profinet網(wǎng)關(guān)在匯川伺服轉(zhuǎn)矩控制中的集成應(yīng)用與實現(xiàn)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論