") ethercat總線伺服如何控制 EtherCAT運行原理
ethercat總線伺服如何控制 EtherCAT運行原理
ethercat總線伺服如何控制
EtherCAT(Ethernet for Control Automation Technology)是一種用于工業(yè)自動化的高性能實時以太網(wǎng)總線網(wǎng)絡協(xié)議。它是一種快速的、實時的場總線通信協(xié)議,常用于控制伺服系統(tǒng)。
要控制EtherCAT總線上的伺服,你需要以下步驟:
1. 確保你的硬件設置正確:首先,需要正確安裝和連接EtherCAT總線適配器和伺服驅動器。適配器負責將你的控制系統(tǒng)連接到EtherCAT總線網(wǎng)絡,而伺服驅動器是用于控制伺服電機的設備。
2. 配置EtherCAT總線:使用適配器提供的配置軟件,對EtherCAT總線進行配置。這可能涉及設置網(wǎng)絡拓撲、地址分配和通信參數(shù)等。
3. 編寫控制程序:使用編程軟件(如PLC編程軟件)編寫控制程序,該程序可以向EtherCAT網(wǎng)絡發(fā)送命令來控制伺服驅動器。控制程序可以使用各種編程語言,如C/C++、Structured Text(ST)或Function Block Diagram(FBD)。
4. 通信:通過控制程序發(fā)送命令到EtherCAT總線,以控制伺服驅動器。你可以發(fā)送命令來控制伺服的位置、速度、加速度等參數(shù)。
5. 反饋和監(jiān)控:通過EtherCAT總線,你可以獲取伺服驅動器的狀態(tài)和反饋信息,如位置、速度和電流等。這些信息在控制系統(tǒng)中可以用于實時監(jiān)控和反饋控制。
EtherCAT 運行原理
EtherCAT技術突破了其他以太網(wǎng)解決方案的系統(tǒng)限制:通過該項技術,無需接收以太網(wǎng)數(shù)據(jù)包,將其解碼,之后再將過程數(shù)據(jù)復制到各個設備。EtherCAT從站設備在報文經(jīng)過其節(jié)點時讀取相應的編址數(shù)據(jù),同樣,輸入數(shù)據(jù)也是在報文經(jīng)過時插入至報文中(參見圖1)。整個過程中,報文只有幾納秒的時間延遲。
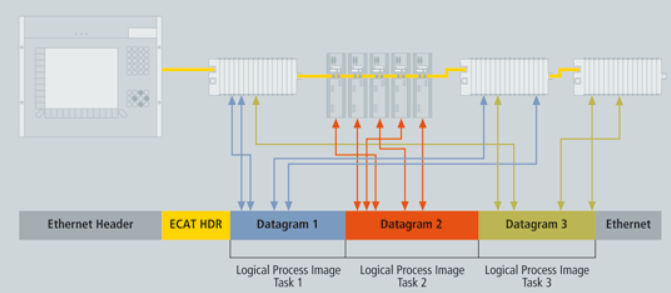
圖 : 過程數(shù)據(jù)插入至報文中
由于發(fā)送和接收的以太網(wǎng)幀壓縮了大量的設備數(shù)據(jù),所以有效數(shù)據(jù)率可達90%以上。100 Mb/s TX的全雙工特性完全得以利用,因此,有效數(shù)據(jù)率可 大于100 Mb/s(即大于2 x 100 Mb/s的90%)(參見圖)。
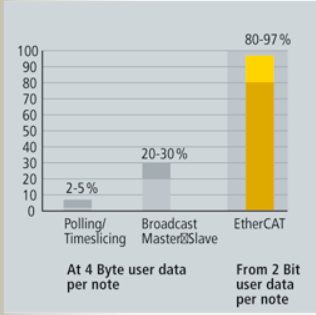
圖 : 帶寬利用率的比較
符合IEEE 802.3標準的以太網(wǎng)協(xié)議無需附加任何總線即可訪問各個設備。耦合設備中的物理層可以將雙絞線或光纖轉換為LVDS(一種可供選擇的以太網(wǎng)物理層標準[4,5]),以滿足電子端子塊等模塊化設備的需求。這樣,就可以非常經(jīng)濟地對模塊化設備進行擴展了。之后,便可以如普通以太網(wǎng)一樣,隨時進行從底板物理層LVDS到100 Mb/s TX物理層的轉換。
ethercat能用普通網(wǎng)線嗎
EtherCAT可以使用普通的以太網(wǎng)電纜(也稱為網(wǎng)線)進行連接。EtherCAT使用標準的以太網(wǎng)物理層傳輸數(shù)據(jù),因此你可以使用常見的Cat5、Cat5e、Cat6或Cat7以太網(wǎng)電纜來連接EtherCAT適配器和設備。
然而,需要注意的是,盡管EtherCAT使用普通的以太網(wǎng)電纜進行物理連接,但它采用了自己的通信協(xié)議和數(shù)據(jù)幀結構。所以,即使使用普通網(wǎng)線連接,你仍然需要適配器和設備來支持EtherCAT協(xié)議和通信。這些設備具備了特殊的電路和處理器,用于實時和高性能的數(shù)據(jù)交換。
因此,在使用EtherCAT時,確保使用符合EtherCAT規(guī)范的適配器和設備,并根據(jù)廠商提供的配置工具和文檔進行正確的設置和連接。這樣,你就可以實現(xiàn)高性能實時控制和通信,而無需特殊的高成本硬件和電纜。
審核編輯:黃飛
-
以太網(wǎng)
+關注
關注
40文章
5582瀏覽量
174724 -
總線
+關注
關注
10文章
2947瀏覽量
89331 -
伺服系統(tǒng)
+關注
關注
14文章
584瀏覽量
39864 -
ethercat
+關注
關注
19文章
992瀏覽量
39608 -
伺服驅動器
+關注
關注
22文章
507瀏覽量
32381
發(fā)布評論請先 登錄





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論