") 基于EtherCAT轉(zhuǎn)Profinet網(wǎng)關(guān)接匯川伺服系統(tǒng)操作模式控制技術(shù)方案
基于EtherCAT轉(zhuǎn)Profinet網(wǎng)關(guān)接匯川伺服系統(tǒng)操作模式控制技術(shù)方案

在工業(yè)自動(dòng)化范疇,不同協(xié)議設(shè)備間的通信常成為技術(shù)難題。本文圍繞EtherCAT主站向Profinet網(wǎng)關(guān)轉(zhuǎn)換以連接匯川伺服系統(tǒng)的操作模式控制展開,從硬件配置、參數(shù)設(shè)置到實(shí)際應(yīng)用場(chǎng)景進(jìn)行研究,為設(shè)備維護(hù)人員和自動(dòng)化技術(shù)人員提供一套具有可實(shí)施性的技術(shù)方案。

一、通信架構(gòu)的關(guān)鍵樞紐:網(wǎng)關(guān)的核心效能
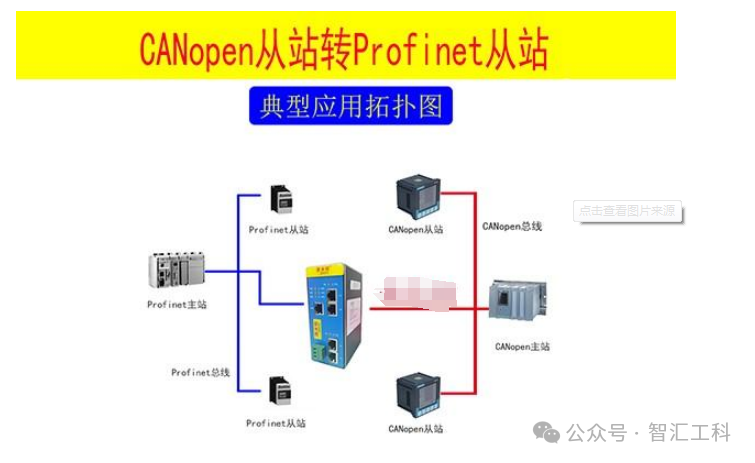
于工業(yè)通信范疇而言,EtherCAT協(xié)議與Profinet協(xié)議仿若兩種別具一格的“通信語(yǔ)言”范式。EtherCAT協(xié)議以其極為突出的高速實(shí)時(shí)特性彰顯優(yōu)勢(shì),而Profinet協(xié)議作為通用性協(xié)議,在工業(yè)應(yīng)用場(chǎng)景中獲得了廣泛的應(yīng)用。通過運(yùn)用EtherCAT轉(zhuǎn)Profinet網(wǎng)關(guān),能夠?qū)崿F(xiàn)PLC(諸如歐姆龍或西門子系列)與匯川伺服系統(tǒng)的數(shù)據(jù)聯(lián)通。這一舉措猶如在二者之間搭建起一座“數(shù)據(jù)通道”,既保證了EtherCAT協(xié)議的毫秒級(jí)響應(yīng)能力,又可使系統(tǒng)融入Profinet網(wǎng)絡(luò)的集中管理架構(gòu)體系。

伺服控制模式解析:位置控制模式
匯川伺服系統(tǒng)可支持位置、速度和轉(zhuǎn)矩三種基礎(chǔ)控制模式,且能借助EtherCAT轉(zhuǎn)Profinet網(wǎng)關(guān)靈活實(shí)現(xiàn)模式切換。其中,位置控制模式(精準(zhǔn)導(dǎo)航)在伺服控制中具有重要意義。
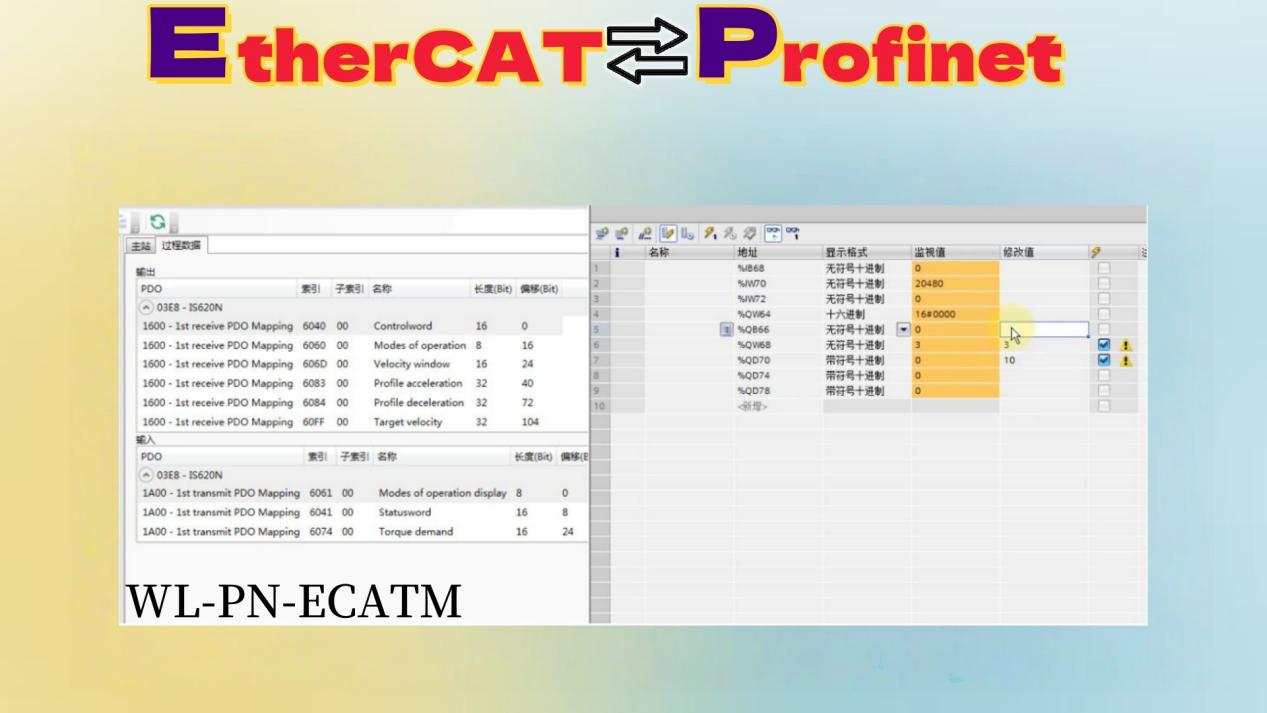
應(yīng)用場(chǎng)景:物料分揀機(jī)械臂的精確點(diǎn)位抓取操作

參數(shù)配置:
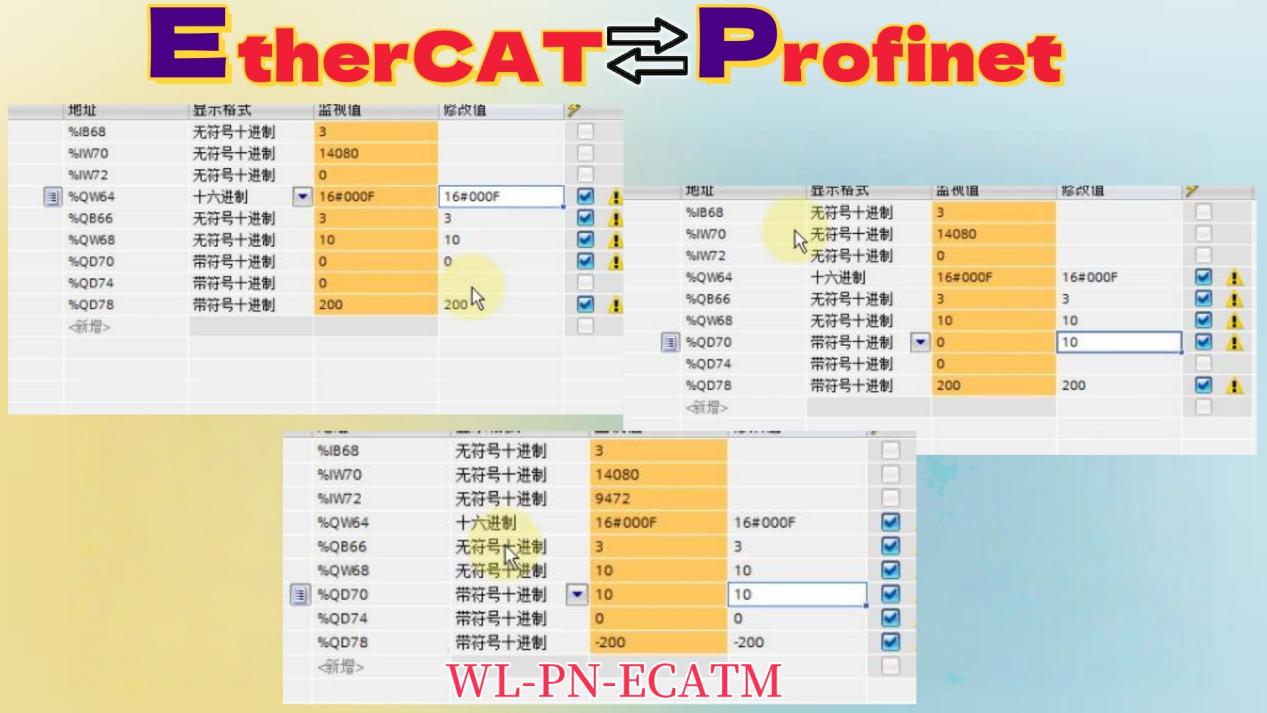
運(yùn)用Profinet通信手段傳輸目標(biāo)脈沖數(shù)量(譬如,10000個(gè)脈沖對(duì)應(yīng)的位移距離為10厘米) ,進(jìn)行加減速曲線的設(shè)定(采用S型曲線可削減機(jī)械沖擊,與汽車實(shí)現(xiàn)平穩(wěn)啟動(dòng)的原理相仿) ,關(guān)鍵參數(shù):電子齒輪傳動(dòng)比(應(yīng)與機(jī)械減速器傳動(dòng)比相適配) 。
通過采用EtherCAT轉(zhuǎn)Profinet網(wǎng)關(guān)技術(shù)實(shí)現(xiàn)匯川伺服系統(tǒng)的集成,不僅能夠克服不同通訊協(xié)議之間的技術(shù)障礙,而且能夠充分利用伺服驅(qū)動(dòng)器的動(dòng)態(tài)響應(yīng)特性。隨著工業(yè)4.0技術(shù)的不斷推進(jìn),此類異構(gòu)網(wǎng)絡(luò)的整合方案預(yù)期將成為智能工廠建設(shè)中的標(biāo)準(zhǔn)配置。掌握該技術(shù)的設(shè)備維護(hù)團(tuán)隊(duì)將能夠顯著提高生產(chǎn)線的靈活性,類似于為機(jī)械設(shè)備配備了“智能導(dǎo)航系統(tǒng)”,在自動(dòng)化技術(shù)的浪潮中實(shí)現(xiàn)精準(zhǔn)的控制與管理。
-
Profinet
+關(guān)注
關(guān)注
6文章
1690瀏覽量
25470 -
伺服系統(tǒng)
+關(guān)注
關(guān)注
14文章
587瀏覽量
40228 -
ethercat
+關(guān)注
關(guān)注
19文章
1118瀏覽量
40030
發(fā)布評(píng)論請(qǐng)先 登錄
工業(yè)自動(dòng)化中EtherCAT轉(zhuǎn)Profinet網(wǎng)關(guān)的速度控制模式配置與優(yōu)化

EtherCAT轉(zhuǎn)Profinet網(wǎng)關(guān)在匯川伺服轉(zhuǎn)矩控制中的集成應(yīng)用與實(shí)現(xiàn)

EtherCAT主站轉(zhuǎn)Profinet網(wǎng)關(guān)連接匯川伺服系統(tǒng)的操作模式控制技術(shù)方案
EtherCAT主站轉(zhuǎn)Profinet網(wǎng)關(guān)接匯川伺服實(shí)現(xiàn)速度控制功能
EtherCAT主站轉(zhuǎn)Profinet網(wǎng)關(guān)接匯川伺服操作模式的控制解析

基于EtherCAT轉(zhuǎn)Profinet網(wǎng)關(guān)接匯川伺服系統(tǒng)操作模式控制技術(shù)方案
匯川IS620N伺服驅(qū)動(dòng)器如何通過etherCAT主站轉(zhuǎn)profinet網(wǎng)關(guān)與西門子1200plc通訊
禾川伺服驅(qū)動(dòng)器與EtherCAT主站轉(zhuǎn)Profinet網(wǎng)關(guān)的雙向數(shù)據(jù)交換
EtherCAT主站轉(zhuǎn)Profinet網(wǎng)關(guān)如何把匯川伺服接入到西門子plc
EtherCAT轉(zhuǎn)CANopen網(wǎng)關(guān)與伺服器在匯川組態(tài)軟件上的配置步驟

EtherCAT主站轉(zhuǎn)Profinet網(wǎng)關(guān)接禾川伺服與PLC通訊的深度解析
EtherCAT主站轉(zhuǎn)Profinet網(wǎng)關(guān)接IS620N伺服驅(qū)動(dòng)器與西門子plc通訊案例
號(hào)外!PLC安川伺服,通過Profinet轉(zhuǎn)EtherCAT網(wǎng)關(guān)同步多個(gè)工作站

CANOpen轉(zhuǎn)PROFINET網(wǎng)關(guān)連接低壓伺服系統(tǒng)
開疆智能EtherNETIP轉(zhuǎn)Profinet網(wǎng)關(guān)連接匯川PLC配置案例






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論