 CAN2.0B的邏輯數值:“顯性”和“隱性”
CAN2.0B的邏輯數值:“顯性”和“隱性”
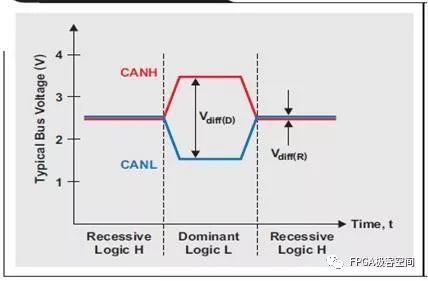
物理信號CAN2.0B規范定義了兩種互補的邏輯數值:“顯性”和“隱性”,同時傳送“顯性”和“隱性”位時,總線結果值為“顯性”。“顯性”(“Daminant”)數值表示邏輯“0”,而“隱性”(“Recessive”)表示邏輯“1”。在CAN規范中并未定義代表邏輯電平的物理狀態(例如電壓),iCAN網絡使用符合ISO11898-2標準的電平信號,典型地,CAN總線為“隱性”(邏輯1)時,CAN_H和CAN_L的電平為2.5V(電位差為0V);CAN總線為“顯性”(邏輯0)時,CAN_H和CAN_L的電平分別是3.5V和1.5V(電位差為2.5V)。
由此可見,無論從實時性、適應性、靈活性,還是可靠性上來看,CAN總線都是一種比RS-232更為優秀的串行總線。當兩臺串口設備的相距較遠,不能直接用RS-232把它們連接起來時,就可以把RS-232轉換為CAN,通過CAN總線來實現串口設備的網絡互連。
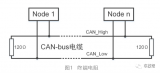
但是,RS-232和CAN在電平和幀格式上都是很大的不同。具體表現如下:RS-232標準電平采用負邏輯,規定+3V~+15V之間的任意電平為邏輯“0”電平,-3V~-15V之間的任意電平為邏輯“1”電平。而CAN信號則使用差分電壓傳送,兩條信號線稱為“CAN_H”和“CAM_L”,靜態時均為2.5V左右,此時的狀態表示為邏輯“1”,也可以叫做“隱性”;用CAN_H比CAN_L高表示邏輯“0”,稱為“顯性”。顯性時,通常電壓值為:CAN_H=3.5V,CAN_L=1.5V。差分電壓定義:Vdiff=CAN_H-CAN_L那個圖中黃線為CAN_H波形,綠線為CAN_L在波形左,右兩端時,CAN_H=CAN_L=2.5v,稱為"隱性"(差值為"0v")在波形中間時,CAN_H=3.5V,CAN_L=1.5V,稱為"顯性"(差值為"2v")
-
CAN總線
+關注
關注
145文章
1973瀏覽量
132230 -
電平
+關注
關注
5文章
367瀏覽量
40411 -
RS-232
+關注
關注
0文章
410瀏覽量
50494
原文標題:CAN電平——隱性與顯性
文章出處:【微信號:ALIFPGA,微信公眾號:FPGA極客空間】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
轉:STM32CubeMX系列教程12:控制器局域網絡(CAN)
CAN通信控制的位時序邏輯--Bit Timing Logic具體實現
CAN-PIC32MZ:使用邏輯分析儀讀取時CAN BUS輸出錯誤
CAN總線工作原理及數據鏈路層、延時分析
充電機和BMS之間通信網絡采用CAN2.0B通訊協議
[ElfBoard] YOU CAN YOU UP 之CAN總線分享
[ElfBoard] YOU CAN YOU UP 之CAN總線
基于顯性與隱性時空關聯的兩種用戶激勵算法

CAN總線的顯性電平與隱性電平
什么是CAN2.0B協議
CAN總線為什么要加終端電阻,不加會有說明影響
CAN SIC收發器助力復雜CAN網絡高效可靠通信(2)






 工商網監
工商網監
評論