 ZMC600E,多核異構如何成就機器人精準控制?
ZMC600E,多核異構如何成就機器人精準控制?
導讀
ZMC600E主站控制器憑借其多核異構處理器的強大性能,實現了高算力與高實時性的完美平衡,讓機器人動作流暢、精準無誤。接下來,讓我們深入了解其內核結構的奧秘。
在ZMC600E主站控制器控制機器人的時候,可以精準的控制機器人執行各種高難度動作。仔細觀察的話你會發現機器人的每個關節都配合的很好,運行也是非常的流暢,幾乎沒有卡頓。究竟ZMC600E主站控制器是如何實現這么高算力、高實時性的呢?讓我們來一起看看它強大的內核結構。ZMC600E主站控制器 采用的是多核異構的處理器,處理器內部包含2個主頻1GHz的64位Arm Cortex-A53內核,4個主頻800MHz的Cortex-R5F內核。
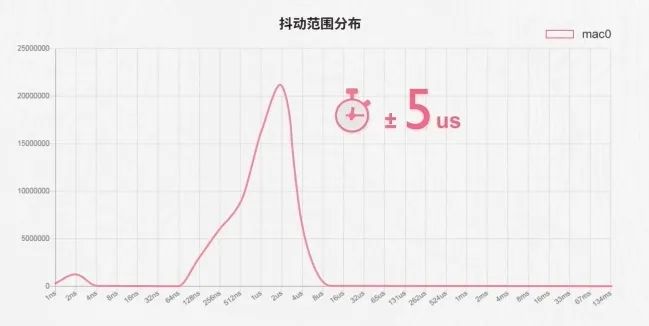
其中Cortex-A53內核運行Linux操作系統,并通過打上RT-Linux補丁來進一步提高系統的實時性,為處理算法、應用等復雜運算提供高算力的性能保障。Cortex-R5F內核則是用來單獨處理EtherCAT通訊,當有數據通訊時會第一時間對接收的數據進行處理,而無需處理其他的線程任務,降低了數據的延時和抖動,可實現毫秒周期任務抖動±5μs以內,為延遲特性提供特別出色的實時性能。
通過各個內核之間分工配合的模式,將每個內核的獨特優勢全部發揮出來,達到高算力、高實時性的效果。大家對ZMC600E還有什么想了解的,歡迎評論區留言。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
控制器
+關注
關注
114文章
16966瀏覽量
182896 -
機器人
+關注
關注
213文章
29482瀏覽量
211546 -
ethercat
+關注
關注
19文章
995瀏覽量
39622
發布評論請先 登錄
相關推薦
熱點推薦
免費試用卡酷教育機器人精簡版套件
` 本帖最后由 12345bzq 于 2015-1-8 15:44 編輯
卡酷教育機器人精簡版套件試用體驗本次贈送項目:卡酷機器人精簡版套件贈送數量:5套贈送對象:DIY機器人愛好者贈送方式
發表于 01-08 14:40
新品發布,多核異構 OK5718-C開發板免費試用!
性能的強烈需求。為了讓更多的行業用戶能第一時間體驗到多核異構解決方案在信息技術、數控機床、機器視覺、機器人等領域的優勢,飛凌嵌入式面向全國行業用戶及技術人員開展OK5718-C開發板的
發表于 05-11 09:26
工業機器人中面對的控制問題是什么
剛開始接觸機器人的時候,我在師兄的機器人代碼里死活找不到有關控制計算的函數,作為常年和控制框圖打交道的我,很是疑惑控制回路去哪里了?因此本文
發表于 06-28 09:29
打造一個異構機器人平臺
描述SwarmUS - 異構機器人平臺該項目旨在打造一個全包平臺,以使異構群體機器人技術成為可能。PCB+展示代碼https://github.com/SwarmUS
發表于 07-27 07:07
造成機器人精度不足的原因有哪些
我們注意到,主動關節誤差和運動學誤差是造成機器人精度不足的最大原因。可以想象,非運動錯誤對涉及高有效負載的應用程序具有更大的影響。
發表于 08-25 18:31
?4267次閱讀
正運動ZMC308E控制器用戶手冊
ZMC308E 高性能多軸運動控制器是一款兼容 EtherCAT 總線和脈沖型的獨立式運動控制器,控制器最多支持 12 軸的復雜連續軌跡控制
發表于 05-24 15:43
?0次下載
【產品應用】ZLG推出新一代工業機器人解決方案,為工業機器人注入新的活力
隨著工業4.0的不斷普及和深入,工業機器人應用越來越廣泛。ZLG致遠電子推出ZMC600E EtherCAT主站控制器和ZTP800示教器,為工業機器人的開發提供可靠的解決方案,助力中

【新品發布】ZMC600E EtherCAT主站控制器全新上市
更多往期文章,請點擊“? 閱讀原文 ?”。 原文標題:【新品發布】ZMC600E EtherCAT主站控制器全新上市 文章出處:【微信公眾號:ZLG致遠電子】歡迎添加關注!文章轉載請注明出處。

工業機器人精密減速器傳動效率試驗
精密減速器是工業機器人的核心部件,占工業機器人本體成本的30%以上,是影響工業機器人精確性、穩定性等性能指標的重要元件。
ZMC900E 國產EtherCAT主站控制器 — 電源口傳導騷擾整改
高性能EtherCAT主站控制器ZMC900E是ZLG致遠電子開發的最新一代EtherCAT主站控制器,其核心采用多核異構的應用處理器,內核

EtherCAT主站控制器系統實時性測試
EtherCAT作為高效的現場總線網絡技術,其實時性能需依賴高實時操作系統才能充分展現。本文以ZMC600E為例,測試系統實時性并分析操作系統抖動數據。ZMC600EEtherCAT主站控制器是廣州
ZMC900E控制器之ROS2環境安裝指南
ZMC900E是致遠電子研發的最新一代高性能EtherCAT控制器,支持ROS2系統,兼備強大功能和實時性,為工業應用帶來新的可能。本文將詳述ROS2特點和安裝,助力用戶在機器人上的二次開發
ZMC600E運動控制器T型、S型速度規劃詳解
。ZMC600E是廣州致遠電子股份有限公司開發的最新一代高性能智能總線型控制器,是面向工廠智能化時代的機器人控制器。ZMC600E采用
ZMC600E運動控制器直線和圓弧插補算法詳解
。ZMC600E是廣州致遠電子股份有限公司開發的最新一代高性能智能總線型控制器,是面向工廠智能化時代的機器人控制器。ZMC600E采用





 工商網監
工商網監
評論