 奇妙聯動!EtherCAT轉CANopen網關與傳感器開啟宇宙導航
奇妙聯動!EtherCAT轉CANopen網關與傳感器開啟宇宙導航
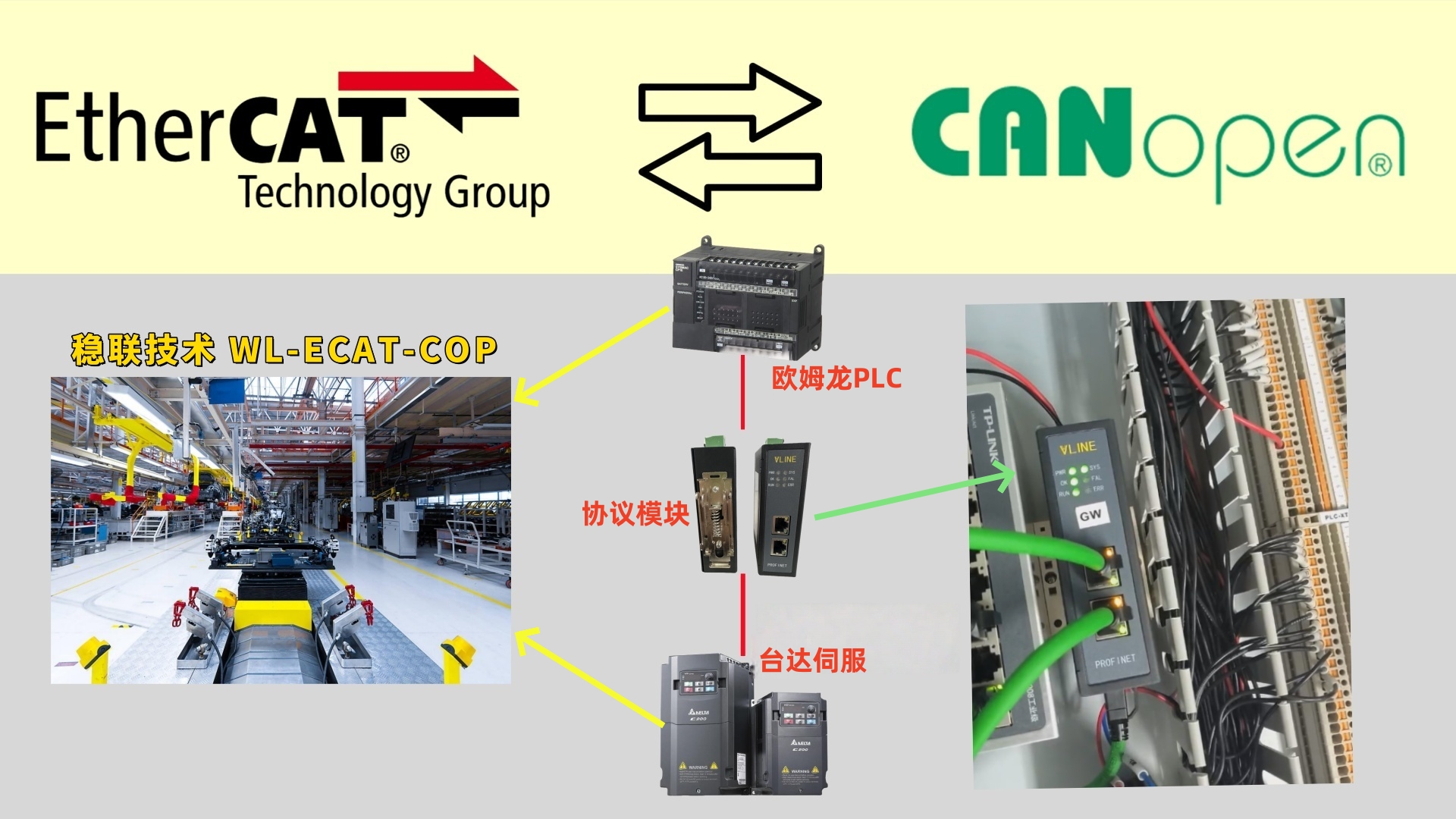
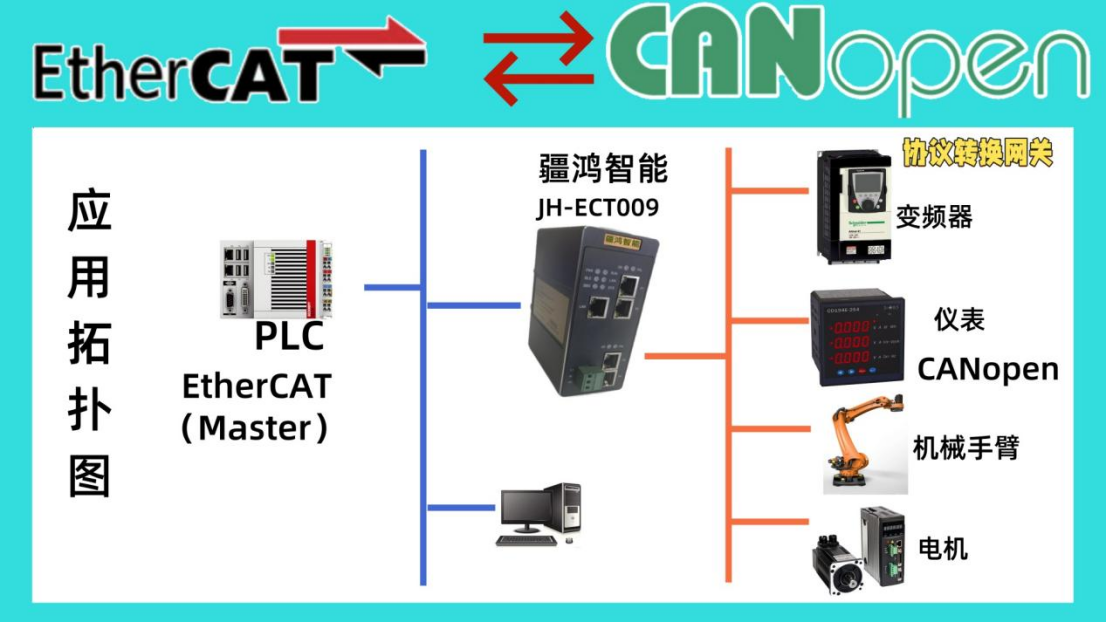
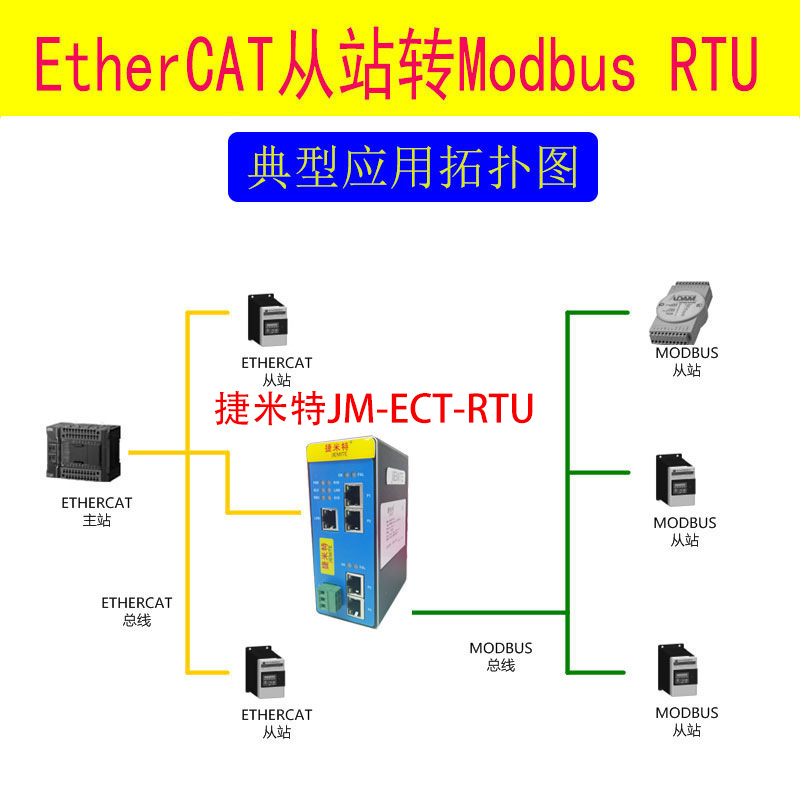
導航定位傳感器在工業場景中常用于位置檢測和定位,為設備的精確運行提供關鍵數據。當我們嘗試將EtherCAT和Canopen協議與導航定位傳感器連接時,卻面臨著諸多挑戰。由于它們是不同的通信協議,“語言不通”,使得數據的交互和設備的協同工作變得困難重重。這時候,穩聯技術EtherCAT轉Canopen網關就成為了解決問題的關鍵,它就像一個“翻譯官”,讓EtherCAT和Canopen能夠順暢地與導航定位傳感器進行“對話”。接下來,就讓我們深入了解一下這個網關連接導航定位傳感器的配置案例。
首先,對網關的Ethercat端進行配置,打開歐姆龍配置軟件新建項目,雙擊EtherCAT---在主設備處右鍵選擇顯示ESI庫---安裝網關的EtherCAT文件。

添加從站到主設備下方,設置好站地址和輸入輸出長度---打開全局變量,設置好對應映射的變量---將變量與從站關聯。
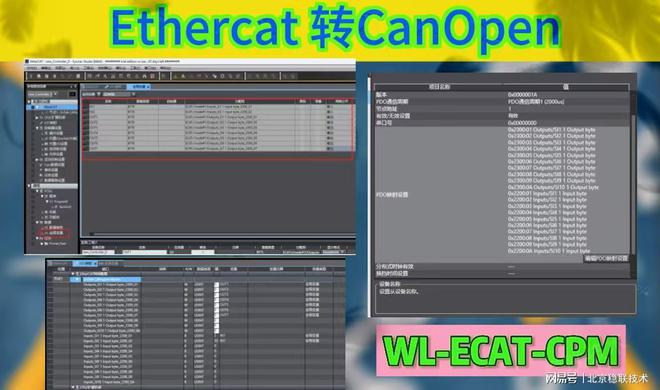
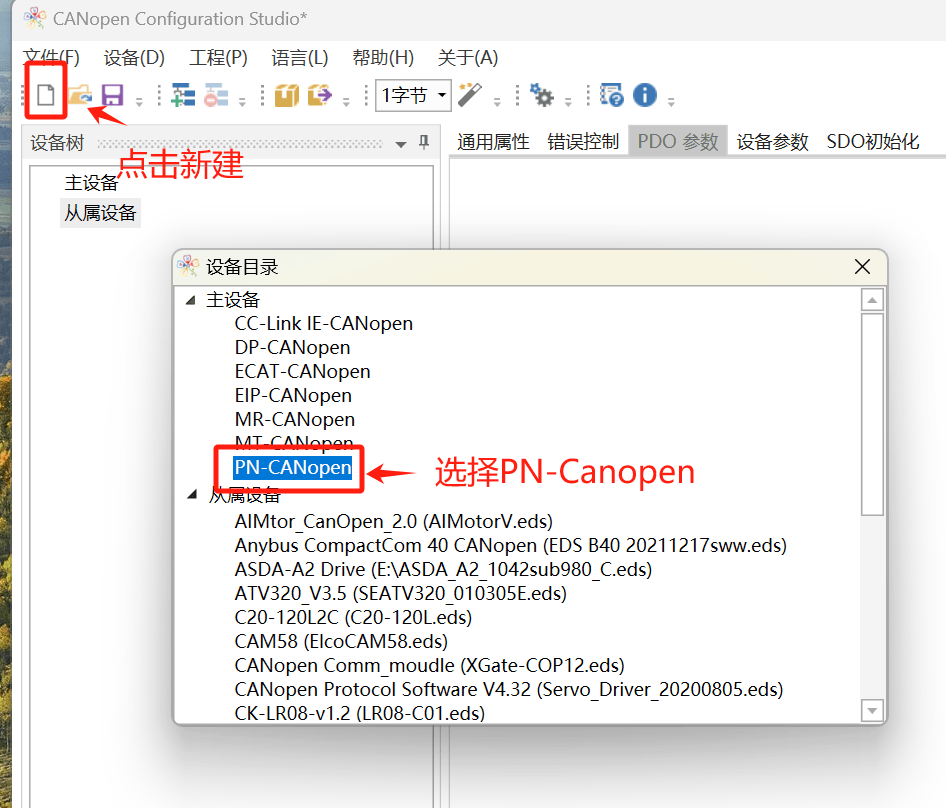
接下來配置穩聯技術Canopen轉EtherCAT網關網關Canopen端,打開配置軟件。波特率的設置要根據實際的通信需求和導航定位傳感器的支持范圍來確定,常見的取值有100kbit/s、125kbit/s、250kbit/s等。比如,如果導航定位傳感器與網關距離較近,干擾較少,可以選擇250kbit/s以提高通信速度;若距離較遠或環境干擾較大,可選擇100kbit/s以保證通信的穩定性。節點ID用于標識導航定位傳感器在Canopen網絡中的身份,每個設備都應有唯一的節點ID,一般取值范圍是1-127,可根據實際網絡中的設備數量和規劃進行設置,例如將導航定位傳感器的節點ID設置為10。另外,還需設置主站的心跳時間和定時發送間隔等參數,心跳時間用于檢測從站設備是否正常工作,一般設置為500ms;定時發送間隔決定了主站向從站發送數據的頻率,可根據實際數據更新需求設置為100ms等。設置好PDO包含的參數以及通訊類型,最后分配好通道偏移對應好歐姆龍的輸入輸出。
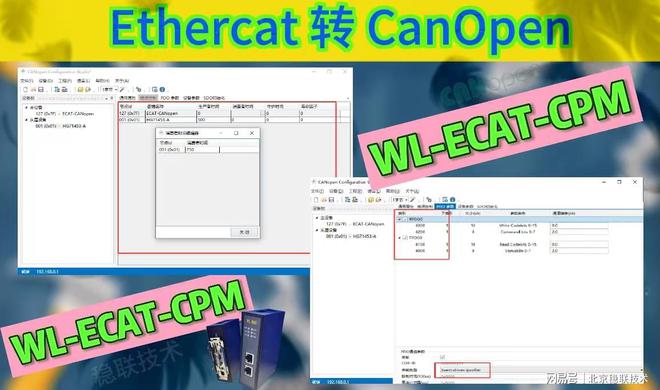
確認無誤后將配置下載到網關,當網關OK等亮起說明EtherCAT通訊正常,即可對從站進行讀寫操作。通過穩聯技術EtherCAT轉Canopen網關配置案例,我們積累了寶貴的經驗。在面對不同通信協議設備連接的問題時,選擇合適的網關并掌握其配置方法是解決問題的核心。同時,在測試過程中,熟練運用專業測試工具進行數據監控和分析,能夠快速發現并解決潛在的問題,保障系統的穩定運行。
審核編輯 黃宇
-
傳感器
+關注
關注
2564文章
52619瀏覽量
763895 -
網關
+關注
關注
9文章
5329瀏覽量
52491 -
CANopen
+關注
關注
8文章
346瀏覽量
44506 -
ethercat
+關注
關注
19文章
1000瀏覽量
39638
發布評論請先 登錄
協議大和解:ETHERCAT轉CANopen網關配置

汽車生產中的測試臺連接 – EtherCAT 轉CANopen高效的網關通信
EtherCAT轉CANopen協議網關應用詳解
開疆智能Profinet轉canopen網關連接易福門(IFM)傳感器配置案例
模具加工廠“夢幻聯動”:EtherNetIP轉CANopen網關成“顯眼包”
EtherCAT轉CANopen轉換機制:運動控制器與傳感器數據交互的核心技術解析

EtherCAT轉CANopen網關在半導體固晶機設備上的應用
EtherCAT轉CANopen配置CANopen側的PDO映射

EtherCAT轉CANOPEN:技術突破與未來展望!
EtherCAT轉CANopen數字油田的高效解決方案

CANopen轉EtherCAT網關連接伺服驅動

三格電子- EtherCAT轉CANopen/ CAN網關

奇妙的交互,真的可以實現CanOpen轉Profinet嗎?
EtherCAT從站轉CANopen主站協議網關(JM-ECT-COP)
CANopen轉EtherCAT協議轉換網關配置案例





 工商網監
工商網監
評論