 EMB系統功能安全分析(3)
EMB系統功能安全分析(3)
以下文章來源于汽車電子研究院,作者ZZ先生志
一、EMB失效控制
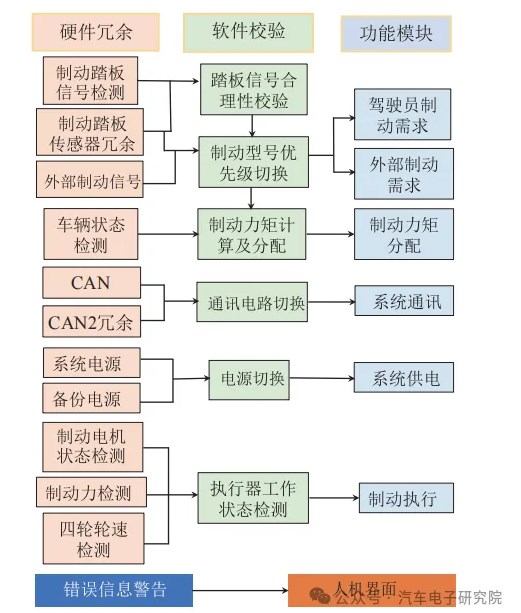
EMB 系統失效判斷基于前面所述三路并行的安全機制,可實時檢測系統運行狀態,探測系統故障,又由于該系統為四輪獨立制動,結合安全機制可引入四輪制動故障因子 λi來表征四輪故障狀態,進行失效判斷。故障因子的規則如式所示。
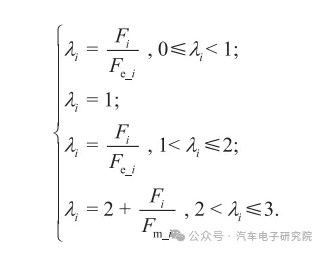
其中:i 表示不同車輪,即 FL、FR、RL、RR,它們分別表示左前輪、右前輪、左后輪、右后輪;Fi 表示實際制動力;Fe-i 表示期望制動力;Fm-i 表示最大制動力。當車輪可以正常制動時 λi = 1,如果有導致制動力降低或制動過度的故障發生,λi 將根據實際制動力與期望制動力的比值確定,此時 λi 范圍為 0 ≤ λi < 1 及 1 <λi ≤ 2。λi 的值對應車輪丟失制動力的比例,如 λi = 0.8 時,意味著丟失了20% 的制動力。同理,當發生突發制動時,λi 的值為 2 加上多出的制動力與最大制動力之比,λi 范圍為 2 < λi ≤ 3。如當 λi = 2.2 時表示發生了大小為當前最大制動力的 20% 的非預期制動。
二、EMB失效控制策略
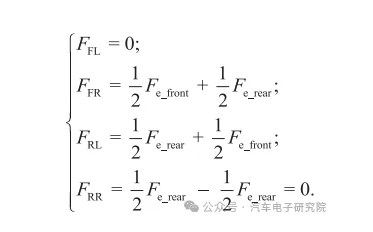
在前文的功能安全分析中,已得出不同的故障模式及對應 ASIL 等級,由于較常見的故障為單輪制動力丟失,且 EMB 系統為四輪獨立制動架構,于是提出利用其余三輪進行整車制動力重構,以滿足車輛制動需求和穩定性控制。由于在制動過程中會發生載荷轉移,所以前輪發生制動異常時會導致更為嚴重的后果,下文以左前輪制動力完全丟失為例(λFL = 0)設計失效控制策略。制動強度為 z 時,初始制動力為:

其中:m 為車輛質量;Fe-front 為車輛預期前軸總制動力;Fe-rear 為車輛預期后軸總制動力。當左前輪發生制動力丟失時,為滿足車輛制動強度需求和穩定性需求,基于四輪制動力平衡對其余三輪進行制動力重構,具體分配規則為:
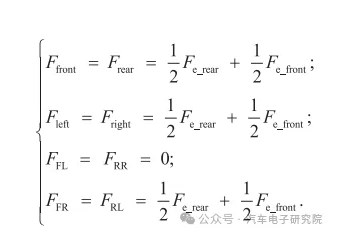
根據式分配規則,可實現在總制動力不變的同時,滿足前后軸、左右側和對角線車輪的制動力均相等,即
在滿足制動強度的基礎上,路面峰值附著系數限制了車輛可實現的最大減速度 [16],因此車輪的最大制動力需滿足約束條件:
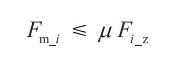
其中:Fm-i 為車輪制動力極限值,μ 為地面附著系數,Fi-z為車輪垂向載荷。根據以上分配規則及約束條件,即可求得余下三輪的重構制動力,右前輪、左后輪及右后輪發生失效后的 EMB 系統失效策略同左前輪失效。此時滿足總制動力需求及制動力平衡需求,可避免車輛制動能力降低和四輪制動力不平衡帶來的車輛失穩,實際控制效果將繼續驗證。
-
汽車電子
+關注
關注
3035文章
8249瀏覽量
169464 -
EMB
+關注
關注
0文章
13瀏覽量
8602 -
功能安全
+關注
關注
2文章
119瀏覽量
5912
原文標題:EMB系統功能安全分析3
文章出處:【微信號:芯長征科技,微信公眾號:芯長征科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
EMB380-S2 開發板技術數據
車輛EMB制動系統的發展歷程簡述
大唐EMB5116產品說明書

EMB1428Q EMB1428Q 開關矩陣柵極驅動器

EMB1499Q EMB1499Q 雙向電流 DC/DC 控制器

EMB1412 EMB1412 MOSFET 柵極驅動器

EMB1061 EMB1061EMB1061是采用ST BlueNRG-132 BLE模塊
EMB系統功能安全分析(1)

EMB系統功能安全分析(2)





 工商網監
工商網監
評論