") 利用51單片機制作廉價盒仔機器人的步驟過程解析
利用51單片機制作廉價盒仔機器人的步驟過程解析
一、盒仔機器人
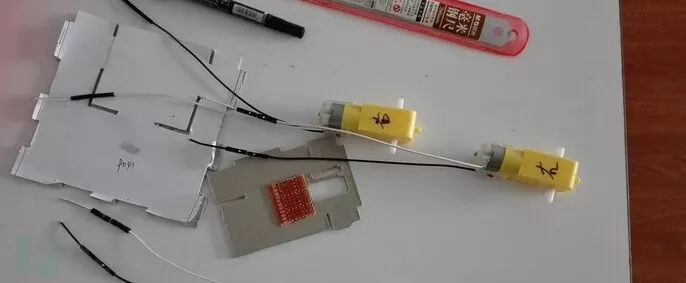
BOXZ,昵稱盒仔,是一款開源的互動娛樂平臺!百度一下,有很多盒仔的制作教程,基本都是用arduino制作完成的。假期沒事,帶著寶寶們用51制作了一個廉價的BOXZ。先上張圖:


從圖上不難看出,為了寶寶們易于接受,我把盒仔的手機搖控改成了用線控的方法,做了一個簡易的搖控器。
二、材料準備

以上原器件,某寶網(wǎng)上都有。另外,制作中需要用到壁紙刀、電鉆、鋼尺、膠水等工具。
三、外殼及皮膚制作
1、外殼的制作
(1)下載模板
從上面的下載地址下載模板,打印出來,然后將硬紙板切割成圖上的樣子,怎么切割我就不用說了吧,呵呵。
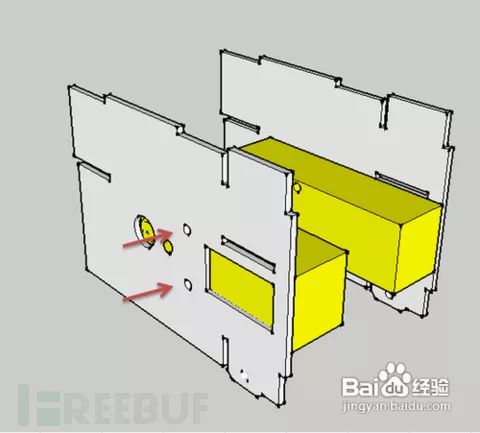
(2)組裝
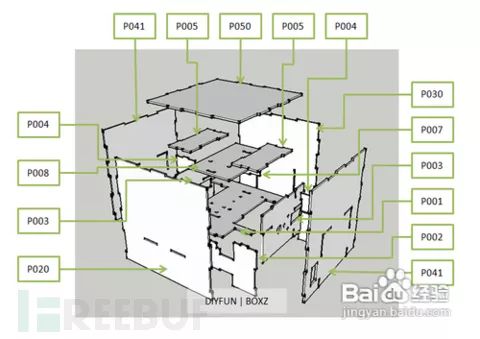
第一步,用到的是P003,2塊電機支撐板,用于連接和固定TT減速箱電機(以下簡稱電機)。在開始安裝電機之前,大家可以先把P003實驗性的插入P001,從而定義好一個方向,我們的電機都是在支撐板內(nèi)側(cè)安裝的。然后就可以用緊固件分別把電機固定在P003的內(nèi)側(cè)了。如圖每塊P003與TT減速箱通過兩個M2x30MM的螺絲固定,兩邊裝上輪子。

第二步,安裝電路板,以及p041、P020、P030以及p050。
以上外殼的安裝過程,如果大家沒看明白,可以百度一下盒仔機器人,外殼都是一樣的。
2、皮膚的制作
下載地址:https://yunpan.cn/crIvwPNjKMrgG 訪問密碼 825a
網(wǎng)上有很多皮膚,這里提供了馬里奧的皮膚下載,我制作中選用了白色的模板,讓寶寶們怎么涂上顏色。

四、電路原理圖
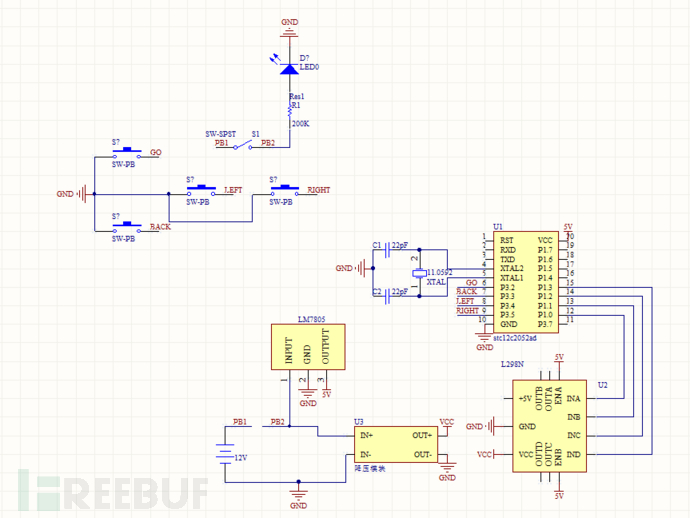
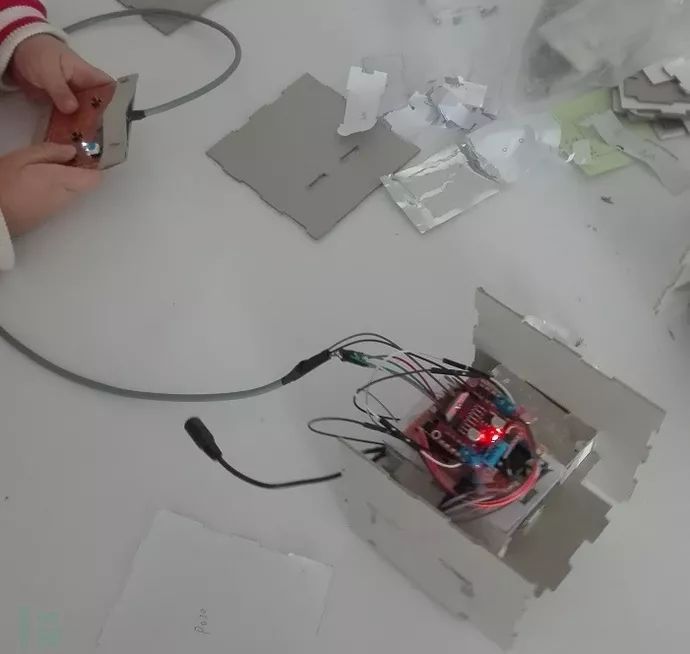
按照上面的原理圖,進行電路焊接,OUTA、OUTB、OUTC、OUTD分別接電機,實物如下圖:
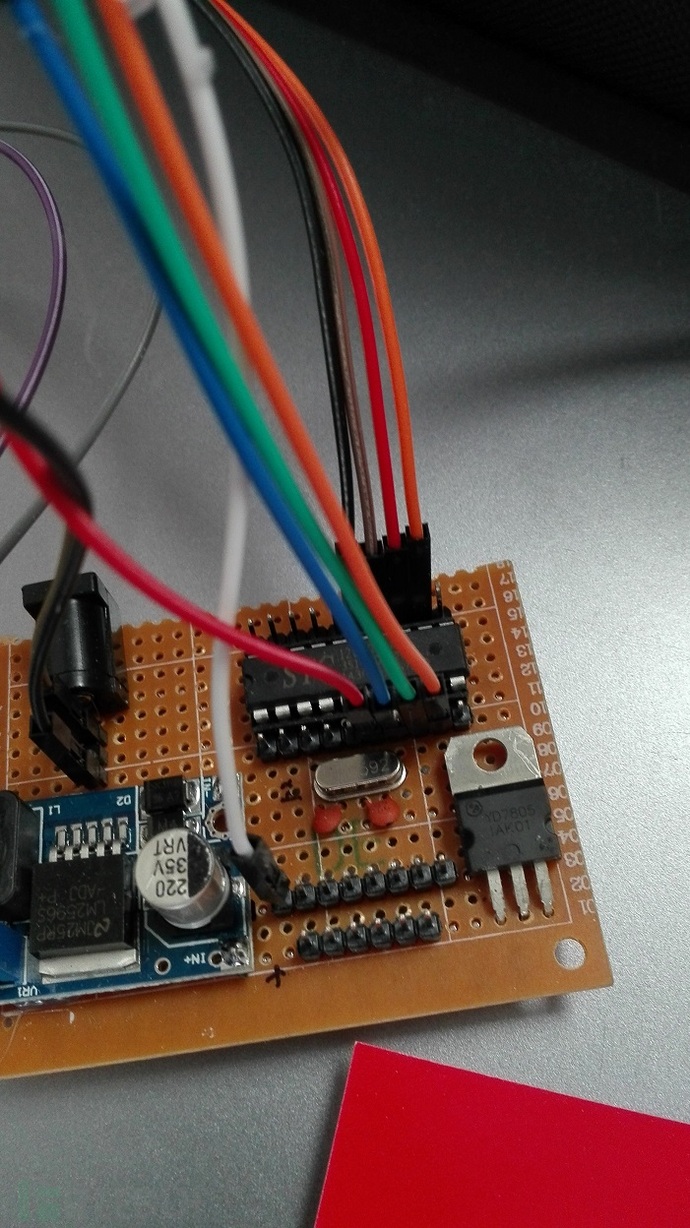
這里要特別注意的是,電路中用到的萬能板的大小一定要剪裁到剛好可以放到兩輪之間的大小,具體要先做好組裝中的第一步,然后實際量一下尺寸,這樣做出來比較美觀。L298N和電池可以直接放在電路板上面,因為上方的空間比較大。
五、程序原代碼
#include
c51的代碼如何燒寫,這里就不講了,不會的同學可以自己網(wǎng)上查一下,很簡單。
-
機器人
+關(guān)注
關(guān)注
213文章
29482瀏覽量
211546 -
51單片機
+關(guān)注
關(guān)注
277文章
5710瀏覽量
126556
原文標題:利用51單片機制作廉價盒仔機器人
文章出處:【微信號:mcu168,微信公眾號:硬件攻城獅】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論